标题:Robust Planning for Persistent Surveillance With Energy-Constrained UAVs and Mobile Charging Stations
作者:Xiaoshan Lin, Yasin Yazıcıo˘glu , and Derya Aksaray
来源:IEEE ROBOTICS AND AUTOMATION LETTERS
摘要
本文考虑通过使用受能量限制的无人驾驶飞行器 (uav) 对环境进行持续 (长期) 监视,无人驾驶飞行器 (uav) 作为移动充电站的支持。目标是通过无人机定期访问一组监测点,同时最小化连续访问这些点之间的最大时间。通常,在这种持续监视场景中,无人机和ugv的最佳规划是NP-hard组合优化问题。此外,该问题还需要一种解决方案策略,该策略可以成功地处理障碍,尤其是在地面上,这些障碍在许多现实生活中都是先验未知的。本文提出了一种可扩展且鲁棒的近似算法,该算法基于1) 组建统一的UAV-UGV团队,2) 将环境分解为最大分区,只要无人机释放得足够近,无人机就可以在单个燃料循环中覆盖该分区的中心,3) 保持团队在穿越这些分区的循环路径上均匀分布,以及4) 让每个团队中的无人机覆盖其当前分区,并在由UGV充电的同时被运送到下一个分区。最后通过一些理论结果和仿真来支持本文提出的算法。
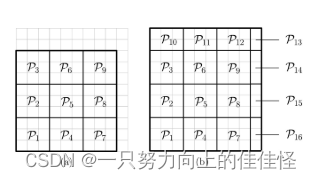
图1 对于a = 11,b = 10和d = 3的情况,通过算法1生成的分区的图示
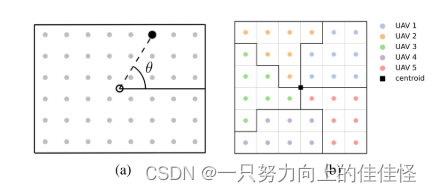
图2 (a) 分区的子分区方案; (b) 将6 × 6分区分为5个子分区的示例
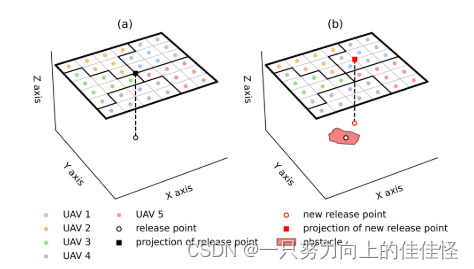
图3 (a) 图2(b) 中的示例的3D图示; (b) 图示障碍物占据隔板的释放点并且UGV需要在其他地方找到新的释放点的情况
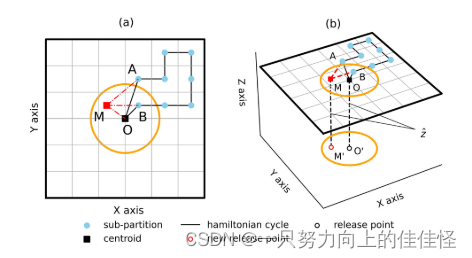
图4 定理1的证明插图。点A和B表示哈密顿周期上与点O相邻的两个点。Ζ z表示无人机的飞行高度
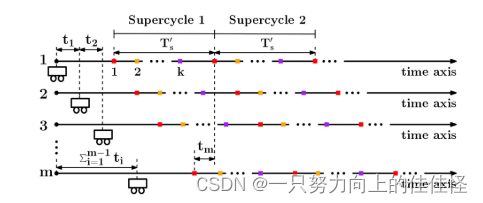
图5 uav-ugv团队监视k个位置的部署协议说明
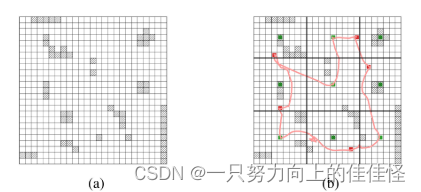
图6 (a) 环境设置; (b) 单团队凉亭模拟中UGV的轨迹。绿色和红色标记分别表示重新计划算法找到的计划发布点和新发布点。粗体黑线显示离线规划器计算的分区
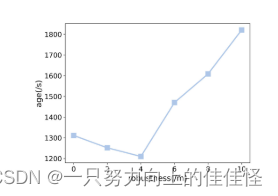
图7 对于鲁棒性参数的不同值,离线规划算法计算的age
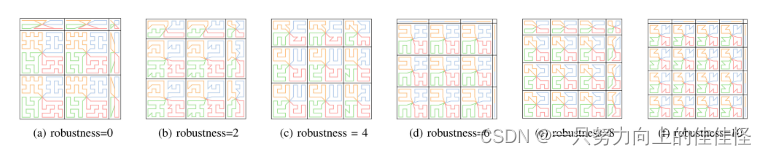
图8 离线规划器针对健壮性参数 (radius) 的不同值给出的分区。黑色实线表示分区和环境的边界。彩色线表示无人机的轨迹。(a) 稳健性 = 0,(b) 稳健性 = 2,© 稳健性 = 4,(d) 稳健性 = 6,(e) 稳健性 = 8,(f) 稳健性 = 10

图9 最大分区算法v.s.的比较[18] 在不同参数下的穷举算法 ( a) 环境大小的影响; (b) 耗尽充电比的影响; © 无人机数量的影响; (d) UAV-UGV速度比的影响
结论
本文提出了一种启发式能量感知算法,用于设计UAV-UGV团队轨迹以持续巡逻环境。通过在离线规划算法中引入鲁棒性,证明了所提出的解决方案在具有未知障碍的环境中是正确的。本文提出了一种部署协议以及UGV协调算法,以便多个uav-ugv团队可以以强大的方式协同巡逻环境,同时最大程度地提高整体性能。作为未来的方向,我们计划研究使用时间逻辑来描述更复杂的监视任务,并探索分布式规划策略以查找UAV/UGV轨迹。

![[操作系统]进程](https://img-blog.csdnimg.cn/ec1451ae832140d9baff0dfb6b373485.png)