文章目录
- 1、源码分析
- 2、算法优化
- 3、总结
在讲解STL中sort的底层原理之前,先引申出这样几个问题?
①STL中sort的底层是采用哪种或者哪几种排序?
②STL中sort会导致栈溢出吗?
③快速排序的时间复杂度是不稳定的 l o g 2 n log_2n log2n,最坏情况会变为n2,如何解决?
④STL中sort是如何控制递归深度的,如果已经到达了递归的深度,此时还没排完序该怎么办?
1、源码分析
C++STL中的sort默认会给我们提供两个接口,如下:
template <class RandomAccessIterator> void sort (RandomAccessIterator first, RandomAccessIterator last)
template <class RandomAccessIterator, class Compare> void sort (RandomAccessIterator first, RandomAccessIterator last, Compare comp)
第一个函数,有两个参数,分别表示迭代器的起始位置,和结束位置,它俩之间就是需要排序的区间
第二个函数,多了一个参数Compare comp,它比较的方式,可以是一个普通函数,或者是仿函数,或者是lambda表达式
如果我们不指定比较方式,默认采用升序排序
以下是vs2017的sort的源码,位置在\include\algorithm中
const int _ISORT_MAX = 32; // maximum size for insertion sort
template<class _RanIt,
class _Pr> inline
void _Sort_unchecked(_RanIt _First, _RanIt _Last, _Iter_diff_t<_RanIt> _Ideal, _Pr _Pred)
{ // order [_First, _Last), using _Pred
_Iter_diff_t<_RanIt> _Count;
while (_ISORT_MAX < (_Count = _Last - _First) && 0 < _Ideal)
{ // divide and conquer by quicksort
auto _Mid = _Partition_by_median_guess_unchecked(_First, _Last, _Pred);
// TRANSITION, VSO#433486
_Ideal = (_Ideal >> 1) + (_Ideal >> 2); // allow 1.5 log2(N) divisions
if (_Mid.first - _First < _Last - _Mid.second)
{ // loop on second half
_Sort_unchecked(_First, _Mid.first, _Ideal, _Pred);
_First = _Mid.second;
}
else
{ // loop on first half
_Sort_unchecked(_Mid.second, _Last, _Ideal, _Pred);
_Last = _Mid.first;
}
}
if (_ISORT_MAX < _Count)
{ // heap sort if too many divisions
_Make_heap_unchecked(_First, _Last, _Pred);
_Sort_heap_unchecked(_First, _Last, _Pred);
}
else if (2 <= _Count)
{
_Insertion_sort_unchecked(_First, _Last, _Pred); // small
}
}
template<class _RanIt,
class _Pr> inline
void sort(const _RanIt _First, const _RanIt _Last, _Pr _Pred)
{ // order [_First, _Last), using _Pred
_Adl_verify_range(_First, _Last); //用于检查区间的合法性
const auto _UFirst = _Get_unwrapped(_First);
const auto _ULast = _Get_unwrapped(_Last);
_Sort_unchecked(_UFirst, _ULast, _ULast - _UFirst, _Pass_fn(_Pred));
}
template<class _RanIt> inline
void sort(const _RanIt _First, const _RanIt _Last)
{ // order [_First, _Last), using operator<
_STD sort(_First, _Last, less<>());
}
我们在调用sort时(没有传入第三个参数),在algorithm中会去调用sort(const _RanIt _First, const _RanIt _Last),在内部会调用sort(const _RanIt _First, const _RanIt _Last, _Pr _Pred),进而会去调用_Sort_unchecked(_RanIt _First, _RanIt _Last, _Iter_diff_t<_RanIt> _Ideal, _Pr _Pred)
因此,主要调用的就是_Sort_unchecked函数:
void _Sort_unchecked(_RanIt _First, _RanIt _Last, _Iter_diff_t<_RanIt> _Ideal, _Pr _Pred)
_First:首元素的迭代器
_Last:末尾元素下一个位置的迭代器
_Ideal:递归层数
_Pred:指定的排序方式
在_Sort_unchecked函数中,如果需要排序的元素是否大于_ISORT_MAX(32)并且递归深度大于0,就进入while循环,通过_Partition_by_median_guess_unchecked函数选取一个mid,然后更新当前排序元素个数的递归深度,接着会递归调用_Sort_unchecked函数。
如果没有进入while循环,就说明但当前排序的元素个数小于等于_ISORT_MAX(32),或者递归深度小于等于0,接着就判断当前排序的元素个数是否大于_ISORT_MAX(32),如果是则说明递归深度小于等于0,因此就采用堆排序来控制递归深度
如果上述条件都没满足,则说明需要排序的元素小于等于32,大于2,此时采用插入排序来进行优化
递归的深度通过以下方式来控制,每次递归,递归的深度都会通过以下方式减少
_Ideal = (_Ideal >> 1) + (_Ideal >> 2); // allow 1.5 log2(N) divisions
最多允许递归1.5*log2(N)层,比如需要排序的元素为1024,那么1.5*log2(1024)=15层,因此最多递归15层,如果需要排序的元素为512,那么最多递归8层
2、算法优化
在这里就不再过多赘述快排的原理,如果还有不知道的小伙伴,就看看我以往写的博客快速排序
因为快排需要选一个基准值用于比较,如果只是单纯的选择最左边的值或者选择最右边的,当将一个有序数列进行反向排序时(升序改为降序,降序改为升序),那么时间复杂度必然为n2,为了防止这个问题,在_Guess_median_unchecked函数内还进行了优化,优化的方式就是三数取中
auto _Mid = _Partition_by_median_guess_unchecked(_First, _Last, _Pred);
template<class _RanIt,
class _Pr> inline
pair<_RanIt, _RanIt>
_Partition_by_median_guess_unchecked(_RanIt _First, _RanIt _Last, _Pr _Pred)
{ // partition [_First, _Last), using _Pred
//这里取了一个中间值,但是在_Guess_median_unchecked内部会对该位置的数据进行优化
_RanIt _Mid = _First + ((_Last - _First) >> 1); // TRANSITION, VSO#433486
_Guess_median_unchecked(_First, _Mid, _Last - 1, _Pred);
_RanIt _Pfirst = _Mid;
_RanIt _Plast = _Pfirst + 1;
while (_First < _Pfirst
&& !_DEBUG_LT_PRED(_Pred, *(_Pfirst - 1), *_Pfirst)
&& !_Pred(*_Pfirst, *(_Pfirst - 1)))
{
--_Pfirst;
}
while (_Plast < _Last
&& !_DEBUG_LT_PRED(_Pred, *_Plast, *_Pfirst)
&& !_Pred(*_Pfirst, *_Plast))
{
++_Plast;
}
_RanIt _Gfirst = _Plast;
_RanIt _Glast = _Pfirst;
for (;;)
{ // partition
for (; _Gfirst < _Last; ++_Gfirst)
{
if (_DEBUG_LT_PRED(_Pred, *_Pfirst, *_Gfirst))
{
}
else if (_Pred(*_Gfirst, *_Pfirst))
{
break;
}
else if (_Plast != _Gfirst)
{
_STD iter_swap(_Plast, _Gfirst);
++_Plast;
}
else
{
++_Plast;
}
}
for (; _First < _Glast; --_Glast)
{
if (_DEBUG_LT_PRED(_Pred, *(_Glast - 1), *_Pfirst))
{
}
else if (_Pred(*_Pfirst, *(_Glast - 1)))
{
break;
}
else if (--_Pfirst != _Glast - 1)
{
_STD iter_swap(_Pfirst, _Glast - 1);
}
}
if (_Glast == _First && _Gfirst == _Last)
{
return (pair<_RanIt, _RanIt>(_Pfirst, _Plast));
}
if (_Glast == _First)
{ // no room at bottom, rotate pivot upward
if (_Plast != _Gfirst)
{
_STD iter_swap(_Pfirst, _Plast);
}
++_Plast;
_STD iter_swap(_Pfirst, _Gfirst);
++_Pfirst;
++_Gfirst;
}
else if (_Gfirst == _Last)
{ // no room at top, rotate pivot downward
if (--_Glast != --_Pfirst)
{
_STD iter_swap(_Glast, _Pfirst);
}
_STD iter_swap(_Pfirst, --_Plast);
}
else
{
_STD iter_swap(_Gfirst, --_Glast);
++_Gfirst;
}
}
}
这个Mid会返回两个值,[Mid.first,Mid.second]范围内是等于基准值的
选择基准值时,还调用函数_Guess_median_unchecked进行了优化,这个函数就是三数取中
template<class _RanIt,
class _Pr> inline
void _Guess_median_unchecked(_RanIt _First, _RanIt _Mid, _RanIt _Last, _Pr _Pred)
{ // sort median element to middle
using _Diff = _Iter_diff_t<_RanIt>;
const _Diff _Count = _Last - _First;
if (40 < _Count)
{ // median of nine
const _Diff _Step = (_Count + 1) >> 3; // +1 can't overflow because range was made inclusive in caller
const _Diff _Two_step = _Step << 1; // note: intentionally discards low-order bit
_Med3_unchecked(_First, _First + _Step, _First + _Two_step, _Pred);
_Med3_unchecked(_Mid - _Step, _Mid, _Mid + _Step, _Pred);
_Med3_unchecked(_Last - _Two_step, _Last - _Step, _Last, _Pred);
_Med3_unchecked(_First + _Step, _Mid, _Last - _Step, _Pred);
}
else
{
_Med3_unchecked(_First, _Mid, _Last, _Pred);
}
}
这里首先会判断需要排序的元素个数_Count = _Last - _First如果大于40个,则会在if内部定义两个变量,_Step 和 _Two_step,分别表示从区间的起始位置开始的1/8位置处和1/4位置处,此时就有9个位置,_First,_First + _Step,_First + _Two_step,_Mid - _Step,_Mid,_Mid + _Step,_Last - _Two_step,_Last - _Step,_Last。如图所示:
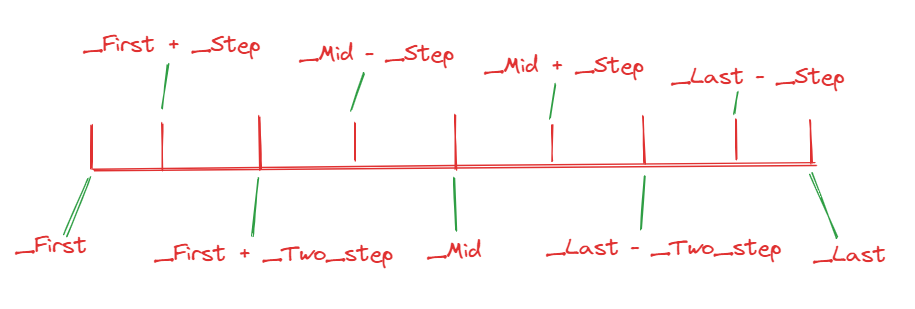
接着通过4组_Med3_unchecked函数,将该9个位置的数据,按照特定的排序规则排序(升序或者降序)
如果需要排序的元素个数大于40,则只需_Last,_Mid 和 _Last 位置所在的数据按照特定的排序规则排序(升序或者降序)
_Med3_unchecked函数
template<class _RanIt,
class _Pr> inline
void _Med3_unchecked(_RanIt _First, _RanIt _Mid, _RanIt _Last, _Pr _Pred)
{ // sort median of three elements to middle
if (_DEBUG_LT_PRED(_Pred, *_Mid, *_First))
{
_STD iter_swap(_Mid, _First);
}
if (_DEBUG_LT_PRED(_Pred, *_Last, *_Mid))
{ // swap middle and last, then test first again
_STD iter_swap(_Last, _Mid);
if (_DEBUG_LT_PRED(_Pred, *_Mid, *_First))
{
_STD iter_swap(_Mid, _First);
}
}
}
_DEBUG_LT_PRED这个宏的作用就是判断后两个参数,也就是位置所对应的数据是否按照特定的排序方式(_Pred)排序,如果不是的话,就通过iter_swap交换
通过_Guess_median_unchecked(_First, _Mid, _Last - 1, _Pred)这个函数,我们已经取得mid基准值,并且mid位置的数据一定大于等于_First,并且小于等于_Last - 1
接着会定义 _Pfirst 和 _Plast
_RanIt _Pfirst = _Mid;
_RanIt _Plast = _Pfirst + 1;
此时的位置关系图如下:
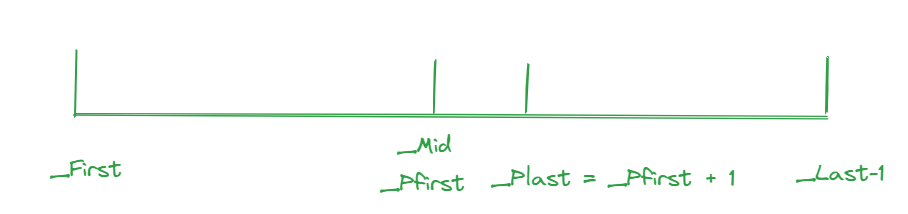
后面两个while是用来选等于基准值的数,最后_Pfirst的处等于基准值,而_Pfirst + 1一定不等于基准值
接着会定义_Gfirst 和 _Glast
_RanIt _Gfirst = _Plast;
_RanIt _Glast = _Pfirst;
位置关系如下:
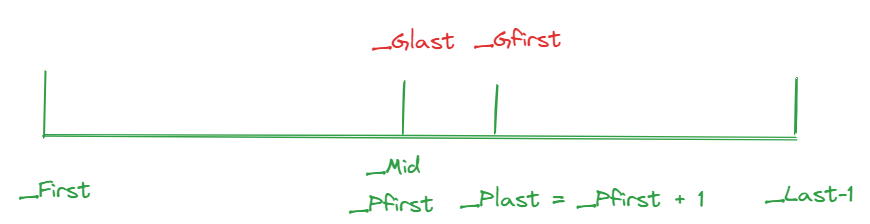
下面的两个for循环就是分别是_Gfirst出发向右走,_Glast出发向左走,以_Gfirst为例子,如果遇到大于基准值(_Pfirst)那么进行下一轮循环,如果小于,那么break,然后在下面和_Glast交换,如果是相等那么和_Plast交换并更新
3、总结
①STL中sort的底层是采用哪种或者哪几种排序?
采用三种排序
如果元素的个数小于等于32,那么就直接使用插入排序
如果元素的个数大于32,但是已经达到最大的递归深度,则采用堆排序
这里为什么采用堆排序,而不采用归并排序呢?因为堆排序不需要消耗额外的空间
如果元素的个数大于32,但还没达到最大的递归深度,则采用快速排序
STL中sort会导致栈溢出吗?
不会,因为对最大的递归深度做了限制,最大的深度不能超过1.5*log2(N)层
③快速排序的时间复杂度是不稳定的 l o g 2 n log_2n log2n,最坏情况会变为n2,如何解决?
sort快排进行了优化,即对基准值做了优化,如果基准值恰好是最大或者最小值那么快排的复杂度会达到n2,因此需要选择一个适中的基准值。如果元素个数大于40个,那么会将整个区间划分为8段,9个位置,对这个9个位置的数据进行排序,最终取出mid。如果元素个数小于等于40个,那么会将整个区间划分为2段,3个位置,对这个3个位置的数据进行排序,最终取出mid。
④STL中sort是如何控制递归深度的,如果已经到达了递归的深度,此时还没排完序该怎么办?
通过这行代码控制递归深度
_Ideal = (_Ideal >> 1) + (_Ideal >> 2); // allow 1.5 log2(N) divisions
最大的深度不能超过1.5*log2(N)层,如果超过了最大递归深度,则采用堆排序