文章参考:
深海游弋的鱼 – 默默的点滴 (mobibrw.com)
深海游弋的鱼 – 默默的点滴 (mobibrw.com)
1. 安装 git
sudo apt install git2. 下载树莓派内核源码
git clone --depth=1 -b rpi-4.9.y https://github.com/raspberrypi/linux.git rpi-linux3. 安装交叉编译器
https://codeload.github.com/raspberrypi/tools/zip/refs/heads/master
修改 tool-master 名称为 rpi-tools
设置操作权限
添加环境变量
chmod +x -R rpi-tools
sudo chown -R `whoami` rpi-linux/
export PATH=$PATH:~/rpi/rpi-tools/arm-bcm2708/gcc-linaro-arm-linux-gnueabihf-raspbian-x64/binsudo apt-get install gcc-arm-linux-gnueabihf4. 配置编译类型
cd rpi-linux/
KERNEL=kernel
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- bcmrpi_defconfig5. 开始编译
make clean
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- zImage modules dtbs -j56. 查看镜像文件
cd rpi-linux/arch/arm/boot生成的 zImage 就是我们需要的 kernel.img。
7. 编译 modules
下载 TMD2755 驱动源文件 TMD2755 Linux Driver![]() https://ams.com/o/download-server/document-download/download/6526410
https://ams.com/o/download-server/document-download/download/6526410
解压将其放到 rpi-linux 文件夹下
进行如下操作:
cd ~/rpi-linux/ams_tmd2755_linux_src_v1.13/driver
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- -C ../.. M=`pwd` clean
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- -C ../.. M=`pwd` CONFIG_SENSORS_TMD2755=m
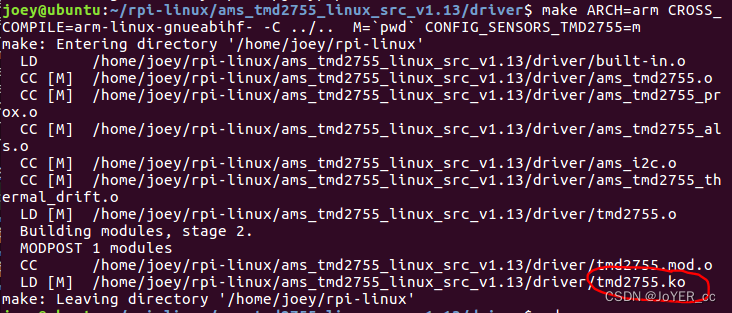
编译所有模块
cd
mkdir modules
cd rpi-linux
make modules_install ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- INSTALL_MOD_PATH=../modules -j58. 烧录系统镜像