目 录
摘 要 I
Abstract II
1 绪论 1
1.1 选题背景及意义 1
1.2 国内外研究现状 2
1.3六自由度并联机器人介绍 3
1.4研究主要内容 6
1.4.1主要设计要求 6
1.4.2技术参数 7
2柔性制造物料抓取及加工系统的结构及工作原理 8
2.1 并联运动机构概述 8
2.2 六自由度并联加工机器人总体结构原理 9
2.3柔性制造物料抓取及加工系统的总体结构 11
2.4 控制系统结构及工作原理 12
2.5 运动控制工作空间的分析 14
2.6三维空间分析原理 16
2.7臂部结构设计的基本要求 22
3 柔性制造物料抓取及加工系统主要部件的设计 25
3.1电动机选型 25
3.2电机的分类 26
3.3选择步进电机的计算 26
3.4传动结构形式的选择 30
3.5 轴承的寿命校核 32
3.6 手爪夹持器结构设计与校核 35
3.6.1手爪夹持器种类 35
3.6.2夹持器设计计算 36
3.7 夹持装置气缸设计计算 38
3.7.1 初步确系统压力 38
3.7.2气缸计算 38
3.7.3 活塞杆的计算校核 41
3.7.4 气缸工作行程的确定 42
3.7.5 活塞的设计 43
3.7.6 导向套的设计与计算 43
3.7.7 端盖和缸底的计算校核 44
3.7.8 缸体长度的确定 45
3.7.9 缓冲装置的设计 45
3.8 气压元件选取及工作原理 46
3.8.1 气源装置 46
3.8.2 执行元件 47
3.8.3 控制元件 48
3.8.4 辅助元件 50
3.8.5 真空发生器 51
4 加工机器人运动控制空间分析 52
4.1加工机器人运动控制的运动学约束 52
4.1.1 连杆杆长约束 52
4.1.2 运动副转角约束 52
4.1.3 连杆杆间干涉 53
4.2 确定运动控制空间的基本方法 53
总 结 55
参考文献 56
致 谢 58
1.4研究主要内容
1.4.1主要设计要求
并联加工机器人具有6个自由度,传动机构有详尽的设计方案,传动部件与连杆结构应有具体的设计计算与校核;加工装置与并联机器人之间要体现柔性设计,控制系统部分完成电控单元中工控机、运动控制卡、电机的选型与电器控制原理图的绘制。
1.4.2技术参数
(1)加工零件材料为碳钢,最大尺寸为 100100200mm;
(2)并联机器人尺寸不能超过9501120950mm;
(3)可加工范围为200200200mm ;
(4)加工精度为0.01mm。
2柔性制造物料抓取及加工系统的结构及工作原理
2.1 并联运动机构概述
从运动控制的结构特点不难看出,加工机器人运动控制属于一种新型非笛卡儿式运动控制系统。传统的笛卡儿式运动控制系统对空间位置坐标的运动控制是直接通过三个相互垂直的长度基准来实现的,也就是说,这种加工机器人的运动控制模型是直接建立在直角坐标系基础之上的,因而该加工机器人具有运动控制建模容易,运动控制结果直观、数据处理简单、符合大多数工件运动控制的需要等优点。而对于由并联闭环机构所组成的并联加工机器人来说,其测头处的空间位置坐标是有若干个并联调节器的长度基准和连接上下平台的球形副(或转动副)的角度基准来表述的,由于这些变量参数之间的关系是非线性,所以与普通直角型加工机器人相比加工机器人运动控制的运动控制建模问题就变得十分复杂。
并联运动机构是指上、下平台用2个或2个以上分支相连,机构具有2个或2个以上自由度,且以并联方式驱动的空间闭环运动机构。由于并联运动机构具有刚度重量比大,运行速度高、末端执行器位姿灵活、误差不叠加、结构简单、易于模块化设计等优点 ,因而在许多领域都已得到广泛的应用。例如:德国汉诺威、斯图加特大学及不伦瑞克大学等已先后将并联运动机构应用于激光加工、机构、普通装配及医学等领域中。国内一些知名大学,如清华大学、天津大学、东北大学、燕山大学和哈尔滨工业大学等等,也正在开展运动控制方面的研究工作。
实际上,运动控制建模问题就是运动控制的正运动求解问题。所谓正运动求解,就是在已知运动控制中各运动副的位置参数及各并联调节器杆长变化量的情况下,来计算末端执行器(如测头)出的空间位置坐标。由空间机构学理论可知并联闭环机构的位置反解比较容易,但其位置正解却相当复杂,到目前为止,也只能给出其数值解,且明显存在多解现象。
我们通过对加工机器人的布局结构进行优化,即将连接上下活动平台的运动副以等边三角形的方式进行排列,从而使个运动副之间的相互关系简洁化,然后充分利用机构的运动约束和集合约束关系,建立由对应机构组成的并联加工机器人的运动控制模型。
2.2 六自由度并联加工机器人总体结构原理
本文所研究的运动控制的结构见图2-1[16]。由图2.2.1可以看出,该主要由上下2个平台和连杆组成。
从机构的连接方式不难看出,三个中间连杆的运动是相互关联和制约的,而不是相互分立的,因此,这种机构属于并联运动机构。运动控制的工作原理十分简单,它是通过移动副的调节器来控制移动副的伸缩,使连杆长度发生变化,从而使测头移动至测点位置,然后再由安装在移动副内的长度运动控制装置测出杆长的变化量,并以此为依据,计算出测点处的空间坐标。
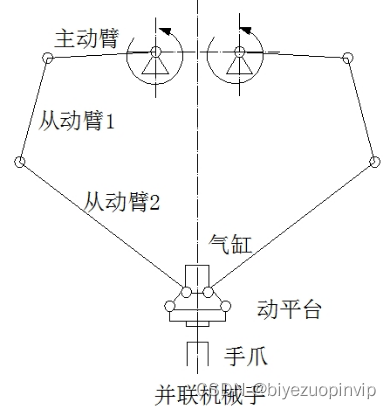
图2.1 运动控制结构简图
自工业机器人问世以来,采用串联机构的机器人占主导位置。串联机器人具有结构简单、操作空间大,因而获得广泛应用。由于串联机器人自身的限制,研究人员逐渐把研究方向转向并联机器人。和串联机器人相比,并联机器人有以下特点:
1.并联结构其末端件上同时由6根杆支撑,与串联的悬臂梁相比刚度大,结构稳定。
2.由于刚度大,并联结构较串联结构在相同的自重或体积下,有高的多的承载能力大。
3.串联机构末端件上的误差是各个关节误差的积累和放大,因而误差大、精度低,并联式则没有那样的误差积累和放大关系,微动精度高。
4.串联机器人的驱动电机及传动系统大都放在运动着的大小臂上,增加了系统的惯量,恶化了动力性能,而并联机器人将电机置于机座上,减小了运动负荷。
5.在位置求解上,串联机构正解容易,但反解困难。而并联机构正解困难,反解非常容易,而机器人在线实时计算是要计算反解的。













![[附源码]Python计算机毕业设计java高校社团管理系统](https://img-blog.csdnimg.cn/46b79143ec1e4600aeef458e9490f001.png)