一、中断概念
中断是计算机科学中的一个重要概念,指当出现某些特殊情况时,处理器会暂停正在执行的程序,转而执行另一段特定的程序,处理完之后再返回到原程序继续执行。这个特殊的情况就叫做中断。
在80C51单片机中,当某些事件(例如定时器溢出、外部中断等)发生时,单片机会暂停当前正在执行的程序,保存现场,然后跳转到相应的中断服务程序(ISR)去处理这个事件。处理完毕后,再返回到原程序继续执行。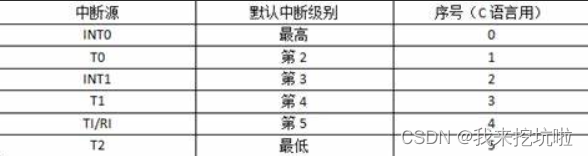
二、80C51单片机的中断系统
80C51单片机的中断系统主要包括以下几个部分:
- 中断源:指能够引起中断的事件,例如定时器溢出、外部中断等。
- 中断标志:当某个中断源发生时,相应的中断标志会被置位。
- 中断优先级:多个中断源同时发生时,处理器会优先处理优先级高的中断源。
- 中断向量:指跳转到相应的中断服务程序(ISR)的入口地址。
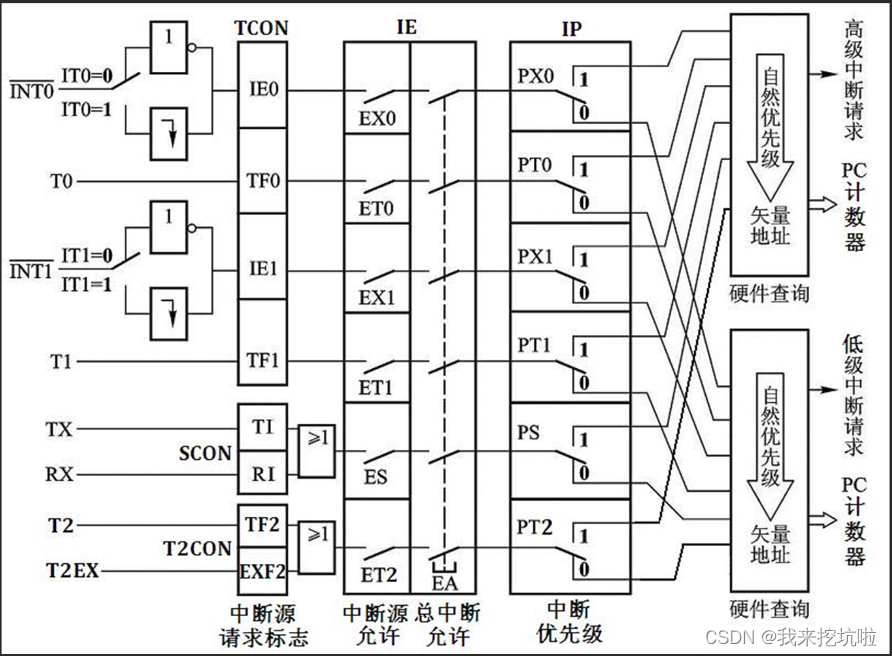
80C51中断系统结构:
三、80C51单片机的中断处理过程
80C51单片机的中断处理过程可以分为以下几个步骤:
- 中断源检测:在每个指令执行结束时,单片机会检查是否有中断源发生。如果有,相应的中断标志会被置位。
- 中断优先级判断:如果有多个中断源同时发生,单片机会根据中断优先级来判断先处理哪个中断源。
- 中断向量计算:根据中断源的类型,计算出相应的中断向量。
- 保存现场:在处理中断之前,单片机会保存当前的程序状态(包括堆栈指针、程序计数器等)。
- 跳转到ISR:根据计算出的中断向量,跳转到相应的中断服务程序(ISR)。
- ISR执行:在ISR中执行相应的处理代码。
- 恢复现场:ISR执行完毕后,单片机会恢复之前保存的程序状态。
- 返回原程序:返回到原程序中继续执行。
四、代码案例
#include <reg51.h>
void timer0_init(); // 定时器0初始化函数声明
void timer0_isr() interrupt 1; // 定时器0中断服务程序声明
void main() {
timer0_init(); // 初始化定时器0
while(1) { // 主循环
// 这里写你的主程序代码
}
}
void timer0_init() {
TMOD = 0x01; // 设置定时器模式,这里使用模式1(16位定时器)
TH0 = 0xFC; // 设置定时器初始值,这里设置为FC(即0xFC)
TL0 = 0x18; // 设置定时器初值(低8位)
ET0 = 1; // 打开定时器0中断使能
TR0 = 1; // 启动定时器0
}
void timer0_isr() interrupt 1 {
TH0 = 0xFC; // 重新加载定时器初始值
TL0 = 0x18; // 重新加载定时器初值(低8位)
// 这里写你的中断服务代码
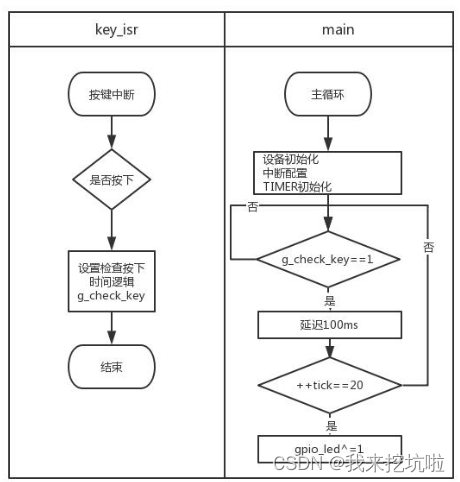
} 在timer0_init函数中,我们设置了定时器的模式和初始值,并打开了定时器中断使能。在timer0_isr函数中,我们实现了定时器中断服务程序,每次定时器溢出时,这个函数会被调用。在主循环中,我们可以编写主程序代码。当定时器溢出时,会打断正在执行的程序,转而执行timer0_isr函数中的代码。处理完之后,会返回到主循环中的代码继续执行。
五、总结
80C51单片机的中断系统是一个非常重要的功能,使得单片机能够及时响应和处理外部或者内部的事件。通过配置相应的寄存器,可以设置中断源、中断优先级以及中断向量,从而实现不同的中断处理需求。在编程时,需要注意保存现场和恢复现场,以防止中断服务程序执行过程中被打断。通过使用中断,可以实现单片机的实时控制和数据处理等功能。



![[CTFshow 红包挑战] 刷题记录](https://img-blog.csdnimg.cn/direct/6c2211b368fc4e089ab615ac48e5f1b0.png)