1 service介绍
1.1 service概念
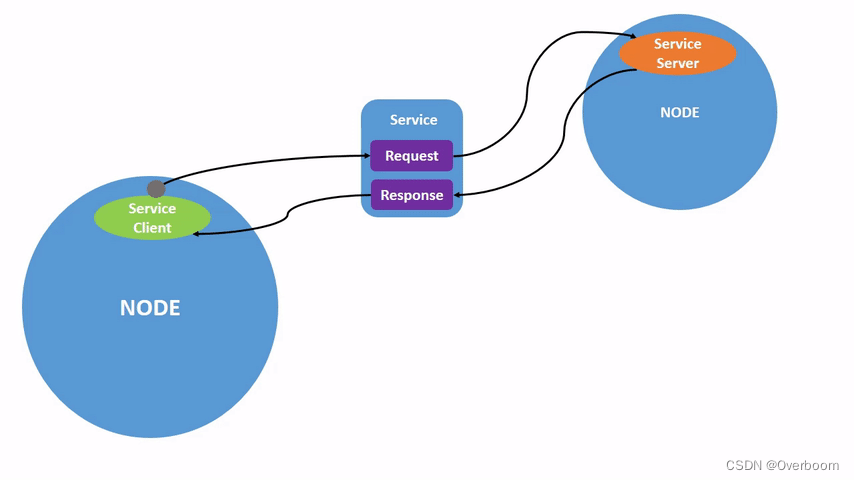
话题通信是基于订阅/发布机制的,无论有没有订阅者,发布者都会周期发布数据,这种模式适合持续数据的收发,比如传感器数据。机器人系统中还有另外一些配置性质的数据,并不需要周期处理,此时就要用到另外一种ROS通信方式——服务(Service)。服务是基于客户端/服务器模型的通信机制,服务器端只在接收到客户端请求时才会提供反馈数据。
1.2 service特点
-
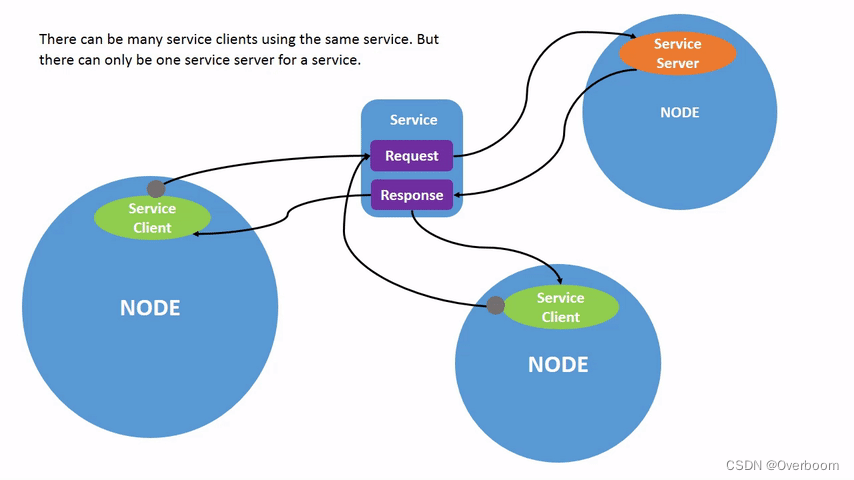
同一个服务(名称相同)有且只能有一个节点来提供
-
同一个服务可以被多个客户端调用(可以一对一也可一对多)
-
同步通信
这个过程一般要求越快越好,假设服务器半天没有反应,你的浏览器一直转圈圈,那有可能是服务器宕机了,或者是网络不好,所以相比话题通信,在服务通信中,客户端可以通过接收到的应答信息,判断服务器端的状态,我们也称之为同步通信。
2 自定义通信接口
和话题通信类似,服务通信的核心还是要传递数据,数据变成了两个部分,一个请求的数据,比如请求苹果位置的命令,还有一个反馈的数据,比如反馈苹果坐标位置的数据,这些数据和话题消息一样,在ROS中也是要标准定义的,话题使用.msg文件定义,服务使用的是.srv文件定义。
2.1 新建工作空间
mkdir -p dev_ws/src
cd dev_ws/src
ros2 pkg create custom_interface --build-type ament_cmake
2.2 编写srv接口文件
# 创建srv目录
cd dev_ws/src/custom_interface
mkdir srv
touch CapitalFullName.srv
CapitalFullName.srv
string name
string surname
---
string capitalfullname
2.3 编译
colcon build
3 service代码实现
上面第二步已经实现了自定义接口,并在install目录生成了对应的头文件,我们下面的代码中可以直接引用这个自定义接口了。
3.1 新建工作空间
前面已经讲解过,这里不再赘述
这里创建工作空间名为learning03_service
3.2 server_node_class.cpp
/**
* @file service_node_class.cpp
*
* @brief A basic ROS2 service server node with class implementation that gets two
* strings as request and answer with a capitalized full string as response.
* It's necessary to use the custom message defined in the external
* package "Custom msg and srv"
* To call the service from a terminal use on a single line:
* ros2 service call /create_cap_full_name
* custom_interface/srv/CapitalFullName "{name: x, surname: y}"
*
* @author Antonio Mauro Galiano
* Contact: https://www.linkedin.com/in/antoniomaurogaliano/
*
*/
#include "rclcpp/rclcpp.hpp"
#include "custom_interface/srv/capital_full_name.hpp"
#include <boost/algorithm/string.hpp>
class MyServiceNode : public rclcpp::Node
{
private:
rclcpp::Service<custom_interface::srv::CapitalFullName>::SharedPtr service_;
void ComposeFullName(const std::shared_ptr<custom_interface::srv::CapitalFullName::Request> request,
std::shared_ptr<custom_interface::srv::CapitalFullName::Response> response);
public:
MyServiceNode(std::string passedNodeName="VOID")
: Node(passedNodeName)
{
RCLCPP_INFO(this->get_logger(), "I am ready to capitalize your full name");
// like the subscriber class node it's needed the boost::bind to acces the member method
// with 2 placeholders to pass request and response to the callback
service_ = this->create_service<custom_interface::srv::CapitalFullName>("create_cap_full_name",
std::bind(&MyServiceNode::ComposeFullName, this, std::placeholders::_1, std::placeholders::_2 ));
}
};
// method to handle the client request and give back a response
// the service gets the name and surname and responses with a capitalized full name
void MyServiceNode::ComposeFullName(const std::shared_ptr<custom_interface::srv::CapitalFullName::Request> request,
std::shared_ptr<custom_interface::srv::CapitalFullName::Response> response)
{
std::string fullName = request->name + " " + request->surname;
std::string capitalFullName = boost::to_upper_copy<std::string>(fullName);
response->capitalfullname = capitalFullName;
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "Incoming name: %s" "\tIncoming surname: %s",
request->name.c_str(), request->surname.c_str());
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "Sending back the capitalize full name: [%s]", response->capitalfullname.c_str());
}
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
auto node = std::make_shared<MyServiceNode>("service_node");
rclcpp::spin(node); // the service starts to wait and manage requests
rclcpp::shutdown();
}
3.3 client_node_class.cpp
/**
* @file client_node_class.cpp
*
* @brief A basic ROS2 service client node with class implementation that asks the user
* to input twostrings and gets back a capitalized full string from the server service.
* It's necessary to use the custom message defined in the external
* package "custom_interface"
*
* @author Antonio Mauro Galiano
* Contact: https://www.linkedin.com/in/antoniomaurogaliano/
*
*/
#include "custom_interface/srv/capital_full_name.hpp"
#include "rclcpp/rclcpp.hpp"
using namespace std::chrono_literals;
class MyClientNode : public rclcpp::Node
{
private:
const std::string name_;
const std::string surname_;
rclcpp::Client<custom_interface::srv::CapitalFullName>::SharedPtr client_;
void ServerResponse();
public:
MyClientNode(std::string passedNodeName="VOID", std::string passedName="VOID", std::string passedSurname="VOID")
: Node(passedNodeName), name_(passedName), surname_(passedSurname)
{
client_ = this->create_client<custom_interface::srv::CapitalFullName>("create_cap_full_name");
this->ServerResponse();
}
};
void MyClientNode::ServerResponse()
{
auto request =
std::make_shared<custom_interface::srv::CapitalFullName::Request>();
request->name = name_;
request->surname = surname_;
std::chrono::seconds myPause = 1s;
while (!client_->wait_for_service(1s))
{
if (!rclcpp::ok())
{
RCLCPP_ERROR(rclcpp::get_logger("rclcpp"),
"Interrupted while waiting for the service. Exiting.");
}
RCLCPP_INFO(rclcpp::get_logger("rclcpp"),
"SERVICE NOT AVAILABLE, waiting again...");
}
auto result = client_->async_send_request(request);
// note that for the MyClientNode object it's used the get_node_base_interface
// to allow the client spinning for a server response
// it returns the needed rclcpp::node_interfaces::NodeBaseInterface::SharedPtr
if (rclcpp::spin_until_future_complete(this->get_node_base_interface(), result) ==
rclcpp::FutureReturnCode::SUCCESS)
{
RCLCPP_INFO(rclcpp::get_logger("rclcpp"), "Capitalized full name: %s",
result.get()->capitalfullname.c_str());
} else
{
RCLCPP_ERROR(rclcpp::get_logger("rclcpp"),
"Failed to call service create_cap_full_name");
}
}
int main(int argc, char **argv)
{
rclcpp::init(argc, argv);
std::string name = "";
std::string surname = "";
std::cout << "Insert the name -> ";
std::cin >> name;
std::cout << "Insert the surname -> ";
std::cin >> surname;
auto node = std::make_shared<MyClientNode>("client_node", name, surname);
rclcpp::shutdown();
}
3.4 CMakeLists.txt
cmake_minimum_required(VERSION 3.5)
project(learning03_service)
# Default to C99
if(NOT CMAKE_C_STANDARD)
set(CMAKE_C_STANDARD 99)
endif()
# Default to C++14
if(NOT CMAKE_CXX_STANDARD)
set(CMAKE_CXX_STANDARD 14)
endif()
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
find_package(rclcpp REQUIRED)
find_package(custom_interface REQUIRED)
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# uncomment the line when a copyright and license is not present in all source files
#set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# uncomment the line when this package is not in a git repo
#set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
# add_executable(service_node src/service_node.cpp)
# ament_target_dependencies(service_node rclcpp custom_interface)
# add_executable(client_node src/client_node.cpp)
# ament_target_dependencies(client_node rclcpp custom_interface)
add_executable(client_node_class src/client_node_class.cpp)
ament_target_dependencies(client_node_class rclcpp custom_interface)
add_executable(service_node_class src/service_node_class.cpp)
ament_target_dependencies(service_node_class rclcpp custom_interface)
install(TARGETS
# service_node
# client_node
client_node_class
service_node_class
DESTINATION lib/${PROJECT_NAME}
)
ament_export_dependencies(rosidl_default_runtime)
ament_package()
3.5 package.xml
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>learning03_service</name>
<version>0.0.0</version>
<description>Example nodes to create service server and service client</description>
<maintainer email="foo@foo.foo">Antonio Mauro Galiano</maintainer>
<license>TODO: License declaration</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<build_depend>rclcpp</build_depend>
<exec_depend>rclcpp</exec_depend>
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
<depend>custom_interface</depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>
4 编译运行
# 编译
colcon build
# source环境变量
source install/setup.sh
# 运行publisher
ros2 run learning03_service client_node_class
# 运行subsriber
ros2 run learning03_service server_node_class
5 service常用指令
# 查看service列表
ros2 service list
# 查看所有service类型
ros2 service list -t
# 查看service类型
ros2 service type <service_name>
# 查看同一类型所有在运行的service
ros2 service find <service_type>
# 查看service内容
ros2 interface show <service_interface>
ros2 interface show <service_name>
# 调用service
ros2 service call <service_name> <service_type>