操作环境:
MATLAB 2022a
1、算法描述
卡尔曼滤波器(Kalman Filter)是一种有效的递归滤波器,它能够从一系列的含有噪声的测量中估计动态系统的状态。在无线通信领域,尤其是在正交频分复用(OFDM)系统中,卡尔曼滤波器被广泛应用于信道估计。下面详细描述Kalman信道估计的过程:
1. 基本原理:在OFDM系统中,由于多径效应和多普勒频移,信道的特性会随时间而变化。卡尔曼滤波器通过对接收信号进行处理,能够估计出这些时间变化的信道参数。
2. 系统模型:卡尔曼滤波器的核心是构建一个合适的系统模型,包括状态方程和观测方程。状态方程描述了信道状态如何随时间变化,而观测方程则描述了如何从接收信号中观测到这些状态。
- 状态方程可以表示为:
- 观测方程可以表示为:
其中, 是第k个时刻的信道状态,
是状态转移矩阵,
是过程噪声,
是第k个时刻的观测值,
是观测矩阵,
是观测噪声。
3. 预测和更新:卡尔曼滤波器的工作流程分为两个步骤:预测和更新。
- 预测:基于当前的状态估计和状态转移矩阵来预测下一状态。
- 更新:当获得新的观测值时,结合预测和实际观测值,利用卡尔曼增益来更新状态的估计。
4. 卡尔曼增益:卡尔曼增益是一个关键的参数,它决定了在更新步骤中应该给予预测状态和新观测值多少权重。增益的计算基于预测误差的协方差和观测噪声。
5. 递归处理:卡尔曼滤波器会在每个时间步骤重复以上预测和更新的过程,逐步优化信道状态的估计。
6. 优势:卡尔曼滤波器在动态变化的信道条件下,特别是在高速移动环境中,能够提供更准确的信道估计。相比于其他信道估计方法,它能更好地跟踪信道的时变特性。
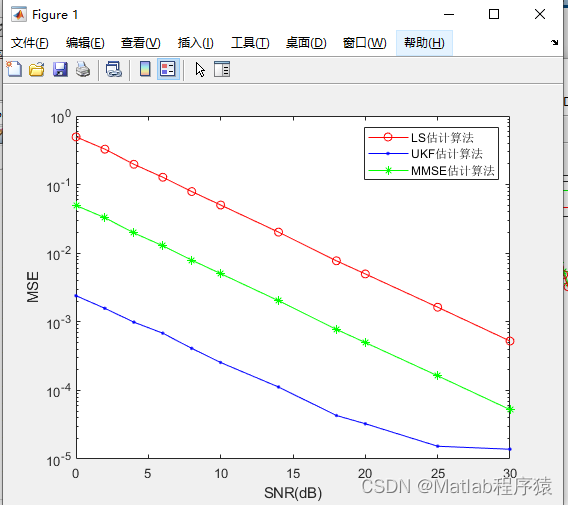
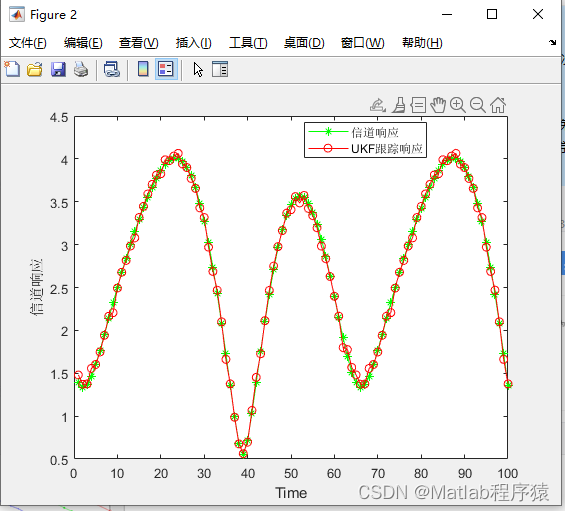
2、仿真结果演示
3、关键代码展示
略
4、MATLAB 源码获取
V
点击下方名片