本文使用modbus slave软件模拟一个受控的modbus设备,此模拟设备提供如下功能:
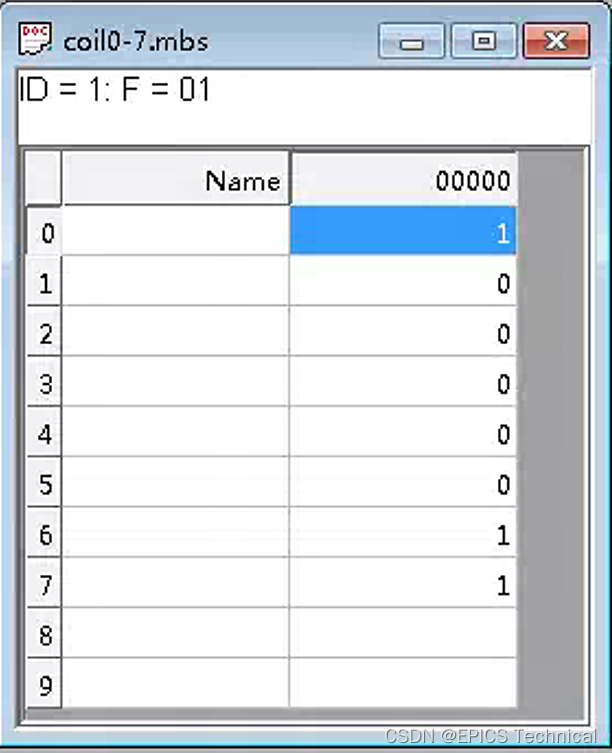
1、线圈1,起始地址为0,数量为8,软件设置如下(功能码1):

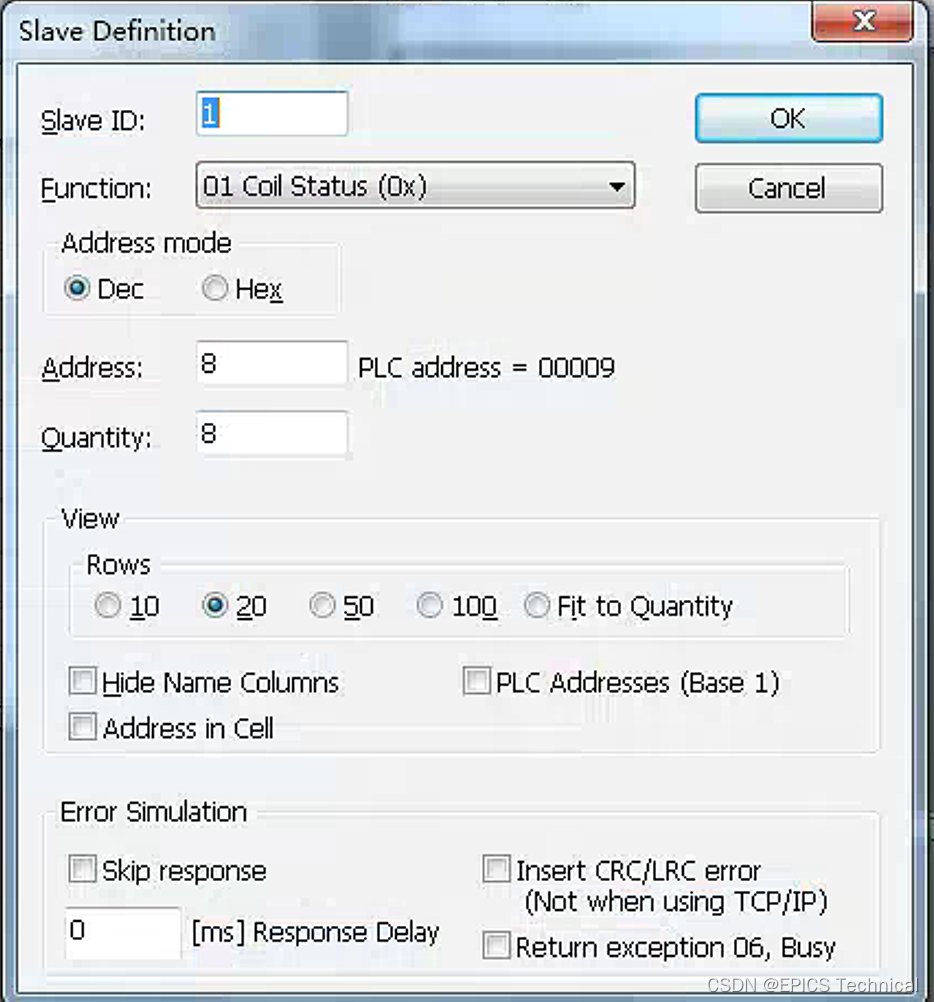
2、线圈2,起始地址为8,数量为8,软件设置如下(功能码1):

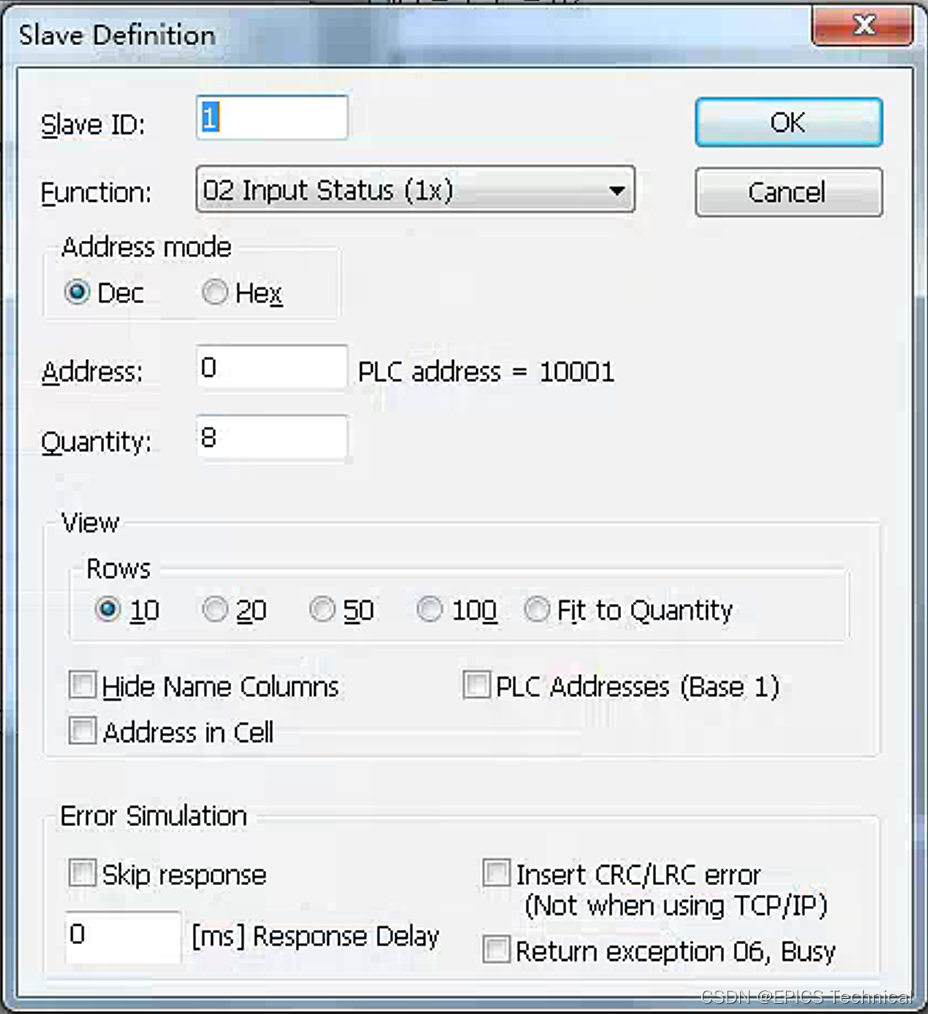
3、离散输入,起始地址为0,数量为8,软件设置如下(功能码2):

使用EPICS Modbus模块对以上modbus设备进行读写,过程如下:
使用makeBaseApp.pl构建IOC程序框架,并且在configure/RELEASE中指定base所在路径以及所需要的支持模块modbus路径。在程序的src路径下Makefile中指定要添加的数据块定义文件和库文件。
在程序的Db目录下,编写如下模板文件:
1) bo_bit.template:用于写modbus设备的单线圈
record(bo,"$(P)$(R)") {
field(DTYP,"asynUInt32Digital")
field(OUT,"@asynMask($(PORT) $(OFFSET) 0x1)")
field(ZNAM,"$(ZNAM)")
field(ONAM,"$(ONAM)")
}2)bi_bit.template:用于读modbus设备的线圈状态或者离散输入状态
record(bi,"$(P)$(R)") {
field(DTYP,"asynUInt32Digital")
field(INP,"@asynMask($(PORT) $(OFFSET) 0x1)")
field(SCAN,"$(SCAN)")
field(ZNAM,"$(ZNAM)")
field(ONAM,"$(ONAM)")
field(ZSV,"$(ZSV)")
field(OSV,"$(OSV)")
}3)wfo_bit.template:用于一次写modbus设备的多个线圈
record(waveform,"$(P)$(R)") {
field(DTYP,"asynInt32ArrayOut")
field(INP,"@asyn($(PORT) $(OFFSET=0))MODBUS_DATA")
field(FTVL,"ULONG")
field(NELM,"$(NELM)")
}4) wfi_bit.template:用于读取modbus设备多个线圈状态或这多个离散输入状态。
record(waveform,"$(P)$(R)") {
field(DTYP,"asynInt32ArrayIn")
field(INP,"@asyn($(PORT) $(OFFSET=0))MODBUS_DATA")
field(SCAN,"$(SCAN)")
field(FTVL,"ULONG")
field(NELM,"$(NELM)")
}将以上模板文件添加到相同路径下Makefile文件中:
...
DB += bo_bit.template
DB += bi_bit.template
DB += wfo_bit.template
DB += wfi_bit.template
...回到IOC顶层目录,执行make命令,编译这个IOC。
进入到启动目录iocBoot/iocmodbusbit中,编写记录实例化文件:
1)coil_bo_bits.substitutions:用于实例化8个bo记录,每个bo写modbus设备1个线圈。
file "../../db/bo_bit.template" { pattern
{P, R, PORT, OFFSET, ZNAM, ONAM}
{COUT:, CO0B, C0_Out_Bits, 0, Low, High}
{COUT:, CO1B, C0_Out_Bits, 1, Low, High}
{COUT:, CO2B, C0_Out_Bits, 2, Low, High}
{COUT:, CO3B, C0_Out_Bits, 3, Low, High}
{COUT:, CO4B, C0_Out_Bits, 4, Low, High}
{COUT:, CO5B, C0_Out_Bits, 5, Low, High}
{COUT:, CO6B, C0_Out_Bits, 6, Low, High}
{COUT:, CO7B, C0_Out_Bits, 7, Low, High}
}2)coil_bi_bits.substitutions:用于实例化16个bi记录,每个bi读取modbus设备1个线圈状态。
file "../../db/bi_bit.template" { pattern
{P, R, PORT, OFFSET, ZNAM, ONAM, ZSV, OSV, SCAN}
{CIN:, CI00B, C0_In_Bits, 0, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
{CIN:, CI01B, C0_In_Bits, 1, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
{CIN:, CI02B, C0_In_Bits, 2, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
{CIN:, CI03B, C0_In_Bits, 3, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
{CIN:, CI04B, C0_In_Bits, 4, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
{CIN:, CI05B, C0_In_Bits, 5, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
{CIN:, CI06B, C0_In_Bits, 6, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
{CIN:, CI07B, C0_In_Bits, 7, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
{CIN:, CI08B, C1_In_Bits, 0, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
{CIN:, CI09B, C1_In_Bits, 1, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
{CIN:, CI10B, C1_In_Bits, 2, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
{CIN:, CI11B, C1_In_Bits, 3, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
{CIN:, CI12B, C1_In_Bits, 4, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
{CIN:, CI13B, C1_In_Bits, 5, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
{CIN:, CI14B, C1_In_Bits, 6, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
{CIN:, CI15B, C1_In_Bits, 7, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
}3)dis_bi_bits.substitutions:用于实例化8个bi记录,每个bi取modbus设备离散输入状态。
file "../../db/bi_bit.template" { pattern
{P, R, PORT, OFFSET, ZNAM, ONAM, ZSV, OSV, SCAN}
{DIN:, DI00B, D0_In_Bits, 0, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
{DIN:, DI01B, D0_In_Bits, 1, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
{DIN:, DI02B, D0_In_Bits, 2, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
{DIN:, DI03B, D0_In_Bits, 3, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
{DIN:, DI04B, D0_In_Bits, 4, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
{DIN:, DI05B, D0_In_Bits, 5, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
{DIN:, DI06B, D0_In_Bits, 6, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
{DIN:, DI07B, D0_In_Bits, 7, Low, High, NO_ALARM, MAJOR, "I/O Intr"}
}4)coil_wfo_bits.substitutions:实例化一个waveform记录,用于一次最多设置modbus设备8个线圈。
file "../../db/wfo_bit.template" { pattern
{P, R, PORT, OFFSET, NELM}
{COUT:, WFO, C0_Out_WF, 0, 8}
}5) dis_wfi_bits.substitutions:实例化一个waveform记录,用于读取modbus设备8个离散输入的状态。
file "../../db/wfi_bit.template" { pattern
{P, R, PORT, OFFSET, , NELM , SCAN}
{DIN:, WFI, D0_In_Bits, 8, 8, "I/O Intr"}
}编写启动脚本st.cmd:
#!../../bin/linux-x86_64/modbuspoll
#- You may have to change modbuspoll to something else
#- everywhere it appears in this file
< envPaths
cd "${TOP}"
## Register all support components
dbLoadDatabase "dbd/modbuspoll.dbd"
modbuspoll_registerRecordDeviceDriver pdbbase
# 连接modbus设备
drvAsynIPPortConfigure("mpoll","192.168.3.15:502",0,0,1)
# 使用modbus tcp类型
modbusInterposeConfig("mpoll", 0 ,2000,0)
# 用于写线圈,起始地址0,每次写1个,一共写8次
drvModbusAsynConfigure("C0_Out_Bits", "mpoll", 0, 5, 0, 8, 0, 100, "mpoll")
# 用于写线圈,起始地址8,一次写8个线圈
drvModbusAsynConfigure("C0_Out_WF", "mpoll", 0, 15, 8, 8, 0, 100, "mpoll")
# 用于读线圈,起始地址0,每次读取一个,一共读8次,轮询时间为500ms
drvModbusAsynConfigure("C0_In_Bits", "mpoll", 0, 1, 0, 8, 0, 500, "mpoll")
# 用于读线圈,起始地址8,每次读取一个,一共读8次,轮询时间为500ms
drvModbusAsynConfigure("C1_In_Bits", "mpoll", 0, 1, 8, 8, 0, 500, "mpoll")
# 用于读取离散输入,起始地址0,每次读取一个,读取8次,轮询时间100ms
drvModbusAsynConfigure("D0_In_Bits", "mpoll", 0, 2, 0, 8, 0, 100, "mpoll")
cd "${TOP}/iocBoot/${IOC}"
# 加载实例化记录
# 写线圈
dbLoadTemplate("coil_bo_bits.substitutions")
# 写线圈
dbLoadTemplate("coil_wfo_bits.substitutions")
# 读线圈
dbLoadTemplate("coil_bi_bits.substitutions")
# 读离散输入
dbLoadTemplate("dis_bi_bits.substitutions")
# 读离散输入
dbLoadTemplate("dis_wfi_bits.substitutions")
iocInit
启动这个IOC:
[root@localhost iocmodbusbit]# ../../bin/linux-x86_64/modbuspoll st.cmd
#!../../bin/linux-x86_64/modbuspoll
...
# bit write
drvModbusAsynConfigure("C0_Out_Bits", "mpoll", 0, 5, 0, 8, 0, 100, "mpoll")
# bit array write
drvModbusAsynConfigure("C0_Out_WF", "mpoll", 0, 15, 8, 8, 0, 100, "mpoll")
# Coil bit Read
drvModbusAsynConfigure("C0_In_Bits", "mpoll", 0, 1, 0, 8, 0, 500, "mpoll")
drvModbusAsynConfigure("C1_In_Bits", "mpoll", 0, 1, 8, 8, 0, 500, "mpoll")
# Discrete bit Read
drvModbusAsynConfigure("D0_In_Bits", "mpoll", 0, 2, 0, 8, 0, 100, "mpoll")
cd "/usr/local/EPICS/program/modbuspoll/iocBoot/iocmodbusbit"
dbLoadTemplate("coil_bo_bits.substitutions")
dbLoadTemplate("coil_wfo_bits.substitutions")
dbLoadTemplate("coil_bi_bits.substitutions")
dbLoadTemplate("dis_bi_bits.substitutions")
dbLoadTemplate("dis_wfi_bits.substitutions")
iocInit
Starting iocInit
...
## Start any sequence programs
#seq sncxxx,"user=blctrl"
epics> dbl
COUT:CO0B
COUT:CO1B
COUT:CO2B
COUT:CO3B
COUT:CO4B
COUT:CO5B
COUT:CO6B
COUT:CO7B
COUT:WFO
DIN:WFI
CIN:CI00B
CIN:CI01B
CIN:CI02B
CIN:CI03B
CIN:CI04B
CIN:CI05B
CIN:CI06B
CIN:CI07B
CIN:CI08B
CIN:CI09B
CIN:CI10B
CIN:CI11B
CIN:CI12B
CIN:CI13B
CIN:CI14B
CIN:CI15B
DIN:DI00B
DIN:DI01B
DIN:DI02B
DIN:DI03B
DIN:DI04B
DIN:DI05B
DIN:DI06B
DIN:DI07B
1) COUT:CO0B~COUT:CO7B:bo记录,每个bo记录用于写一个线圈。
2)COUT:WF:waveform记录,用于一次写8个线圈。
3)DIN:WFI:waveform记录,用于读取8个离散输入。
4)CIN:CI00B~CIN:CI15B:bi记录,每个bi记录读取一个线圈状态。
5)DIN:DI00B~DIN:DI00B,bi记录,每个bi记录读取一个离散输入。
用css绘制控制界面,进行记录连接后,如下所示:
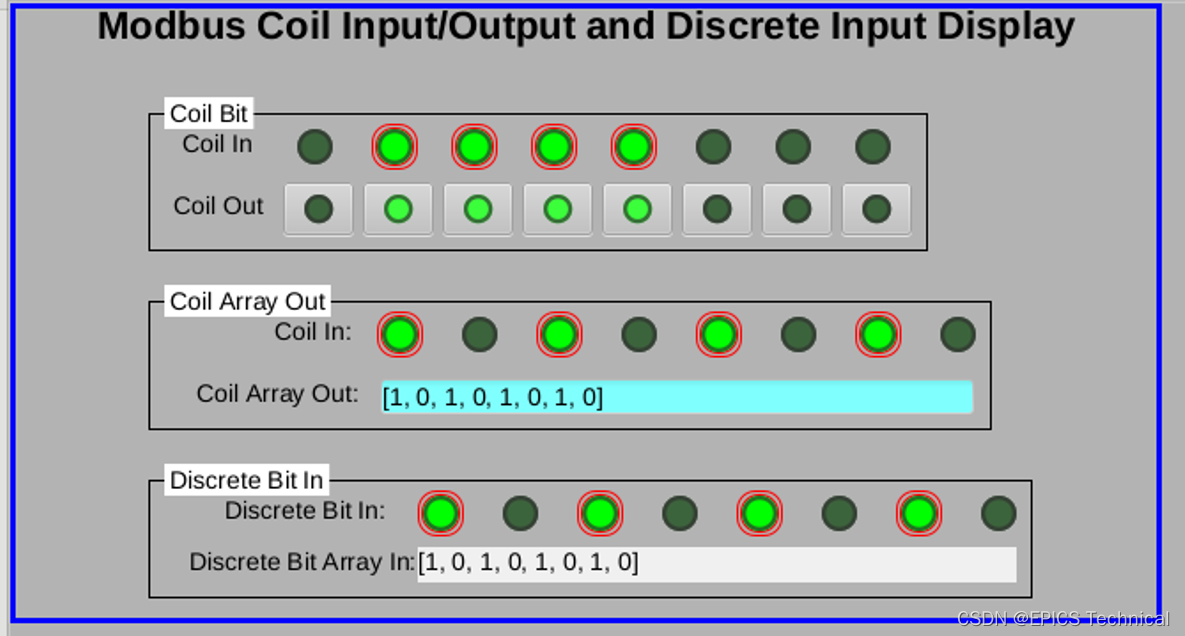
1)顶层窗口区域:Coil Out按钮写线圈,Coil In回读线圈状态
2)中间窗口区域:Coil Array Out可以一次最多写8个线圈,Coil In回读线圈状态。
3)底层窗口区域:用于读取离散输入,离散输入状态需要在modbus slave窗口中设置 ,Discrete Bit in 和Discrete Bit Array In都回读modbus slave窗口中设置的离散输入的状态。