什么是四元数?
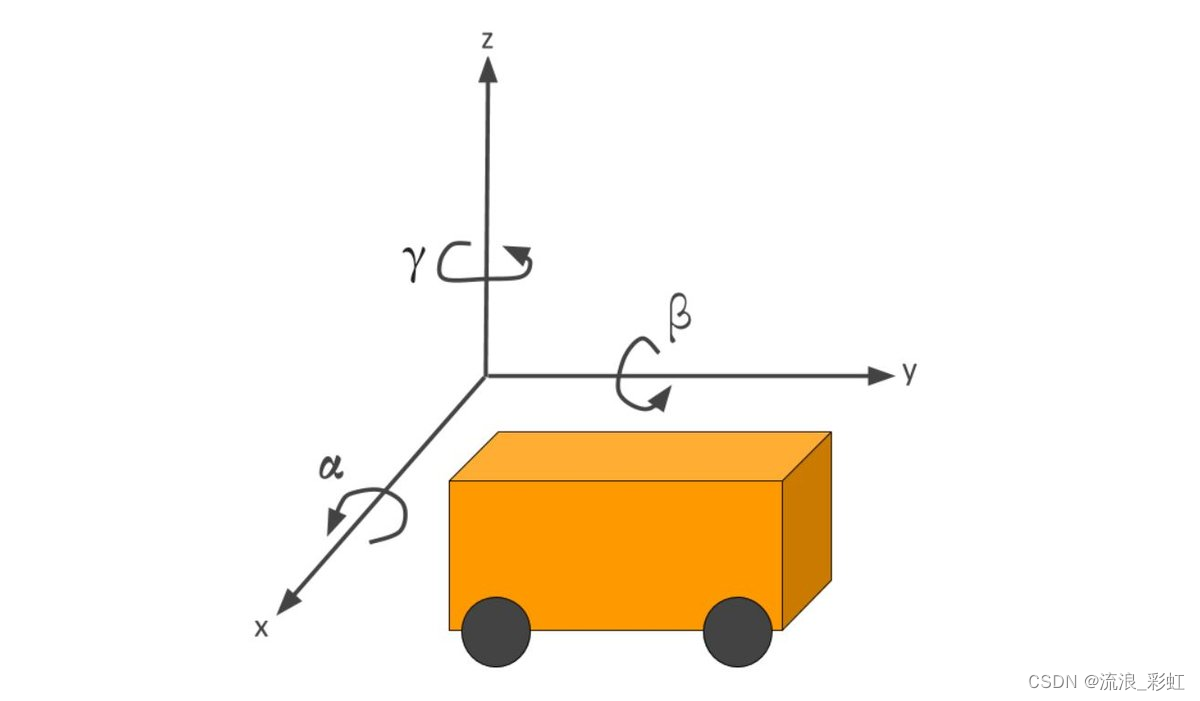
四元数是表示物体在三维空间中的方向和旋转的几种数学方法之一。另一种方法是使用基于欧拉角的旋转矩阵,即滚动、俯仰和偏航,就像的封面图片。
通常使用四元数代替欧拉角旋转矩阵,因为“与 旋转矩阵相比 ,它们更紧凑、 数值更稳定且更高效”(来源:维基百科)。
请注意,四元数仅描述坐标系(即 3D 空间中的某个对象)绕任意轴的旋转,但它不会告诉您有关该对象位置的任何信息。
四元数在机器人中的应用
四元数是ROS中表示方向和旋转的默认方法,ROS 是最流行的机器人软件开发平台。
在机器人技术中,我们总是试图旋转东西。例如,我们可能会在相机中观察一个物体。为了让机械臂抓取物体,我们需要将相机参考系旋转到机器人参考系,以便机器人“知道”物体在自己的坐标系中的位置。
一旦从相机像素坐标到机器人基架坐标的旋转完成,机械臂就可以将其电机移动到适当的角度来拾取物体。
如何表示四元数
四元数是复数的扩展。然而,我们有四个值(a、b、c、d),而不是表示点(或向量)的两个值(例如a + b i 或 x + yi …相同的东西):
q = a + b i + c j + d k
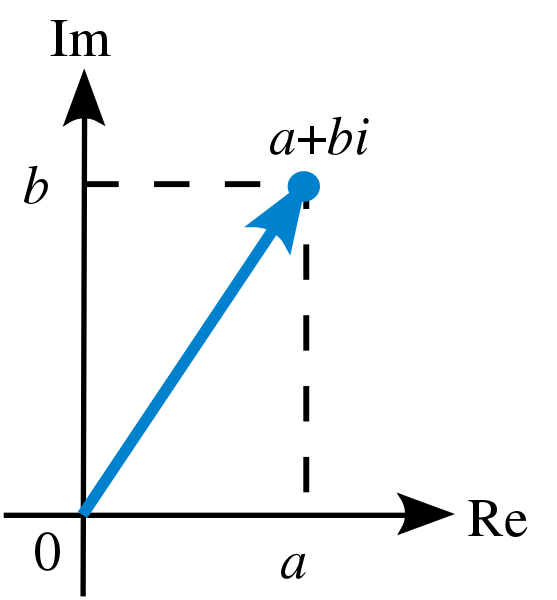
将点 (a, b) 可视化为二维 Argand 图上的复数。
四元数中的四个值由一个标量和一个三元素单位向量组成。
您通常会看到:而不是 a、b、c 和 d:
q = w + x i + y j + z k 或q = q 0 + q 1 i + q 2 j + q 3 k
- q 0是表示旋转角度的标量值
- q 1、q 2和q 3对应于围绕其执行旋转角度的旋转轴。
编写四元数的其他方法如下:
- q = (q 0 , q 1 , q 2 , q 3 )
- q = ( q 0 , q ) = q 0 + q
四元数最酷的一点是它们的工作原理就像复数一样。在二维中,你可以使用复数乘法旋转向量。你可以对四元数执行相同的操作。数学更复杂,有四个项点而不是两个,但原理是相同的。
让我们看一个复数乘法的二维示例,以便你了解乘以虚数(复数)来旋转向量的概念。四元数添加了更多变量来扩展此概念以表示 3D 空间中的旋转。
2D 示例
假设我们在 2D 平面上有一个具有以下规格的向量:(x = 3, y = 1)。
该向量可以用复数表示为:
3 + i (例如使用复数的 x +yi 形式)
让我们将该向量旋转 45 度(即π /4,以弧度表示)。
要旋转 45 度,我们将该数字乘以:
cos( π /4) + sin( π /4)i (德莫弗公式)
因此,我们有 sqrt 的意思(“取平方根”):
(1/sqrt(2)+ i/sqrt(2)) * (3 + i) = sqrt(2) + 2sqrt(2)i
由于:
sqrt(2) = 1.414
我们的新向量是:
(x = 1.414,y = 4.242)
正如我之前提到的,将实数四元数相乘的数学比这更复杂,但原理是相同的。将方向(表示为四元数)乘以旋转(表示为四元数)以获得新方向。
将四元数转换为旋转矩阵
给定一个四元数,可以使用以下公式找到相应的三维旋转矩阵。
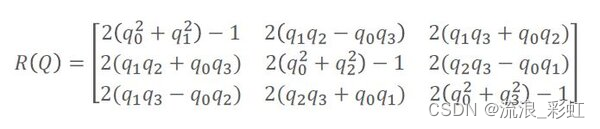
资料来源:JB Kuipers 的《四元数和旋转序列:轨道、航空航天和虚拟现实应用入门》 (第 5 章,第 5.14 节“四元数到矩阵”,第 125 页)
Python代码
import numpy as np
def quaternion_rotation_matrix(Q):
"""
Covert a quaternion into a full three-dimensional rotation matrix.
Input
:param Q: A 4 element array representing the quaternion (q0,q1,q2,q3)
Output
:return: A 3x3 element matrix representing the full 3D rotation matrix.
This rotation matrix converts a point in the local reference
frame to a point in the global reference frame.
"""
# Extract the values from Q
q0 = Q[0]
q1 = Q[1]
q2 = Q[2]
q3 = Q[3]
# First row of the rotation matrix
r00 = 2 * (q0 * q0 + q1 * q1) - 1
r01 = 2 * (q1 * q2 - q0 * q3)
r02 = 2 * (q1 * q3 + q0 * q2)
# Second row of the rotation matrix
r10 = 2 * (q1 * q2 + q0 * q3)
r11 = 2 * (q0 * q0 + q2 * q2) - 1
r12 = 2 * (q2 * q3 - q0 * q1)
# Third row of the rotation matrix
r20 = 2 * (q1 * q3 - q0 * q2)
r21 = 2 * (q2 * q3 + q0 * q1)
r22 = 2 * (q0 * q0 + q3 * q3) - 1
# 3x3 rotation matrix
rot_matrix = np.array([[r00, r01, r02],
[r10, r11, r12],
[r20, r21, r22]])
return rot_matrix