∙
\bullet
∙ 分类模型中除了贝叶斯决策规则,SVM,最近邻分类器,还有决策树
∙
\bullet
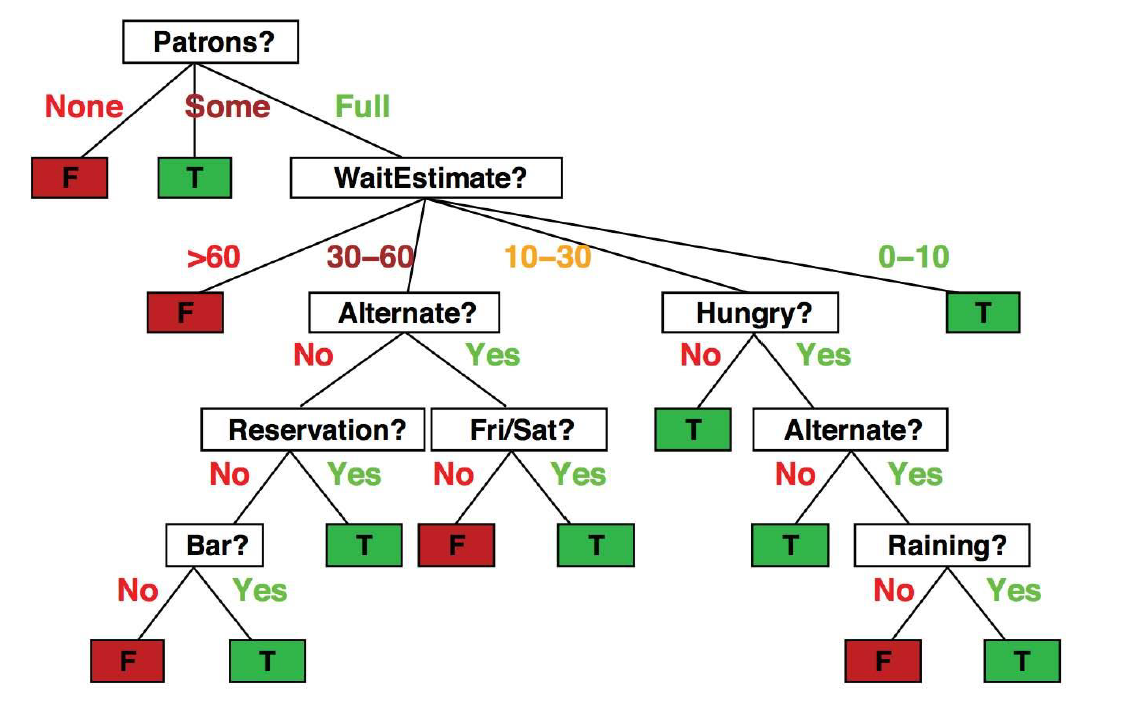
∙ 决策树就是选一个属性,根据属性的不同取值,将样本划分为不同的类,不断重复下去,直到终止。在叶子节点处,通过多数投票,赋予一个标签
∙
\bullet
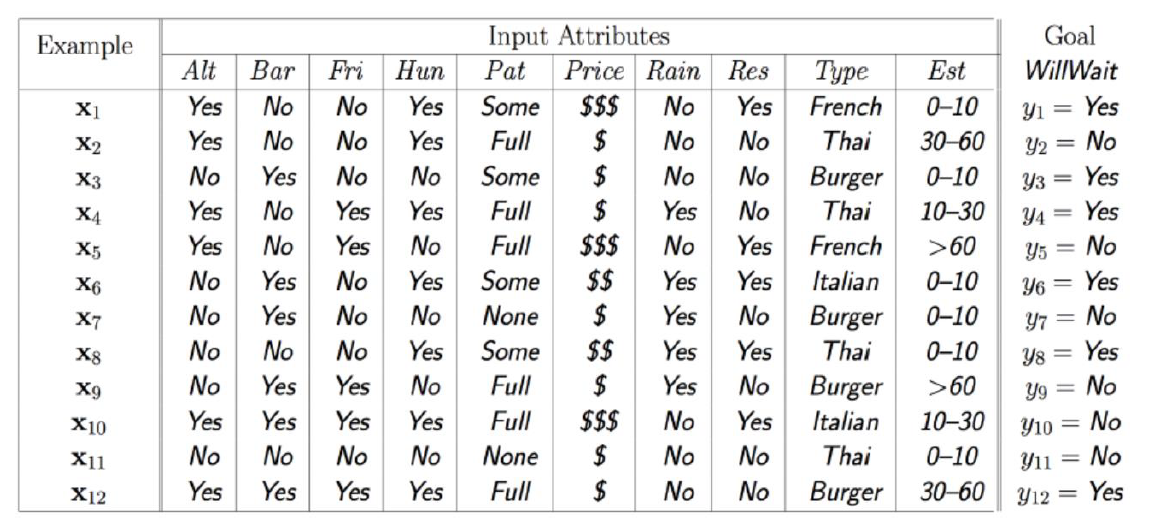
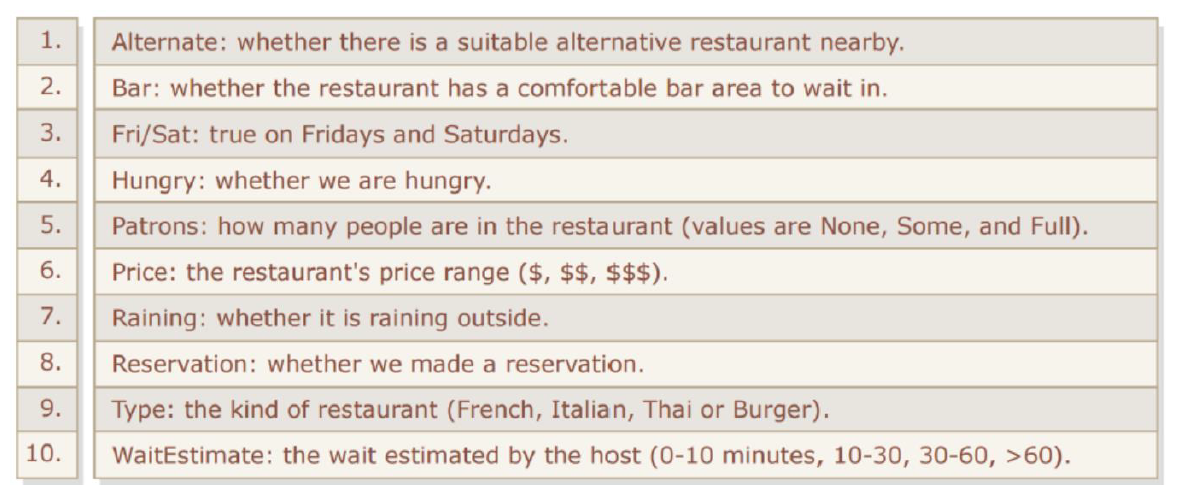
∙ 对于一个餐馆等餐问题
∙
\bullet
∙ 离散属性值天然适合分叉,比如对于性别,男女各为一类;而对于连续的属性值,可以考虑选择一些阈值,将连续值划分为多个取值空间,每个空间为一类,如上面的WaitEstimate
∙
\bullet
∙ 每个叶子节点就代表一个分类或者决策,也是一个rule
∙
\bullet
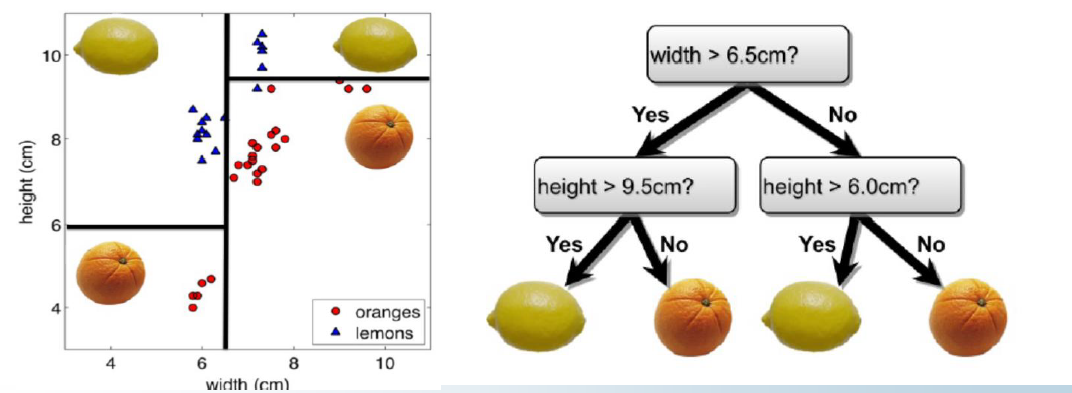
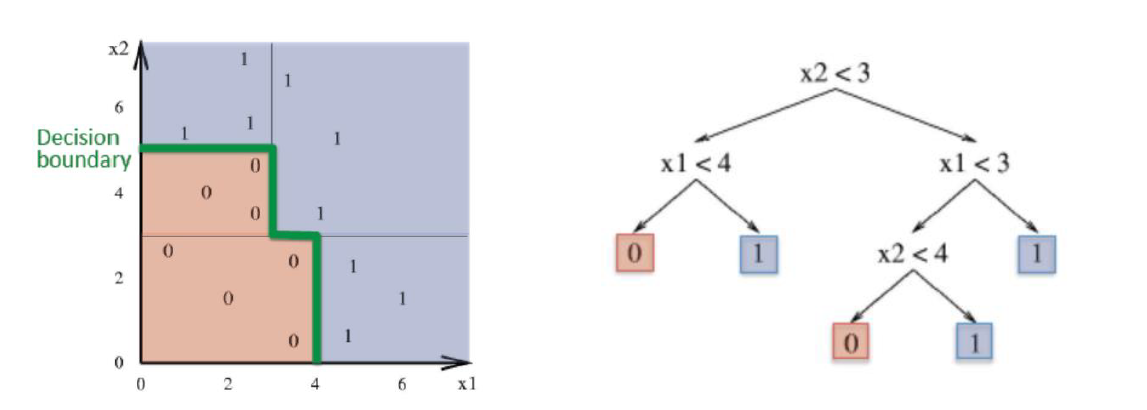
∙ 决策树将特征空间划分为一个个与坐标轴平行的矩形
∙
\bullet
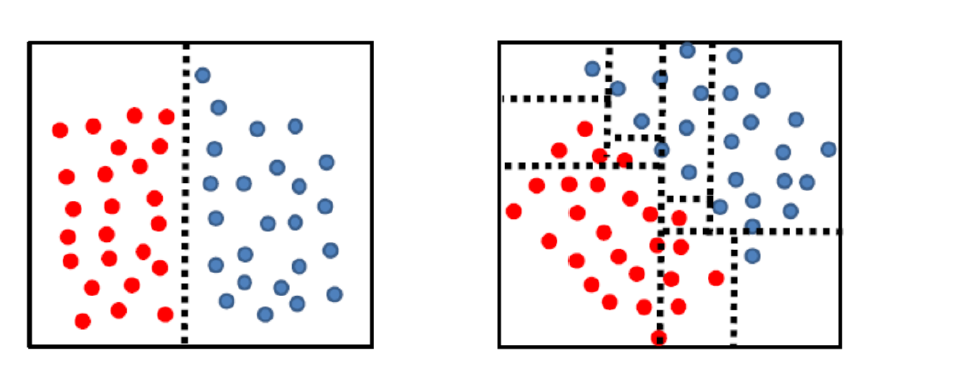
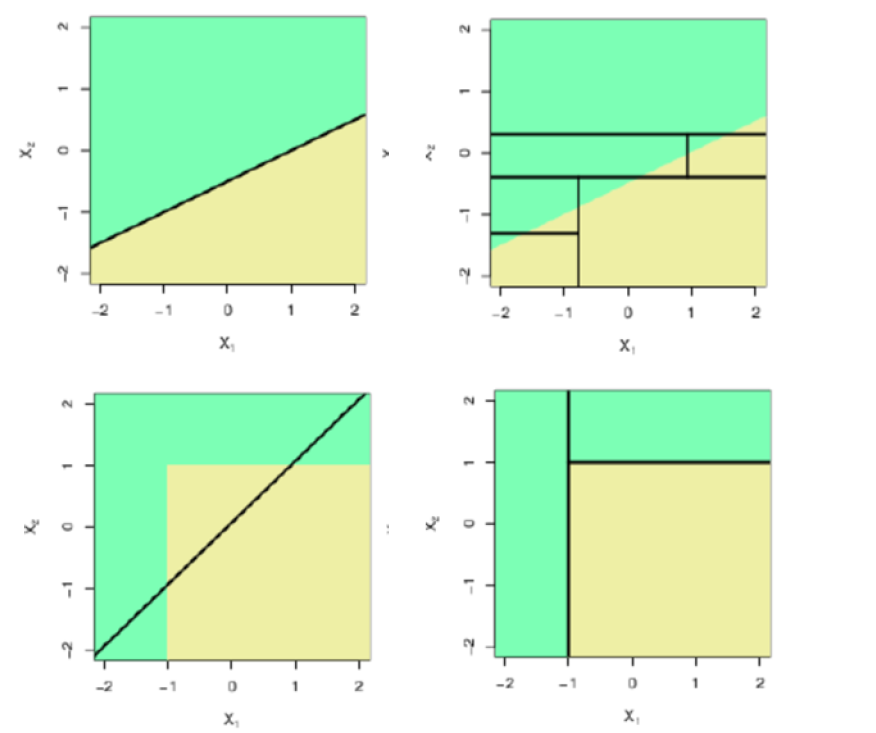
∙ 决策树的复杂度高度依赖于特征空间中样本的几何形状
∙
\bullet
∙ 有些样本用线性分类器很容易,用决策树却很费劲;而有些样本线性不可分,用决策树却几步就完成了。决策树分段线性,合起来就是非线性了。
∙
\bullet
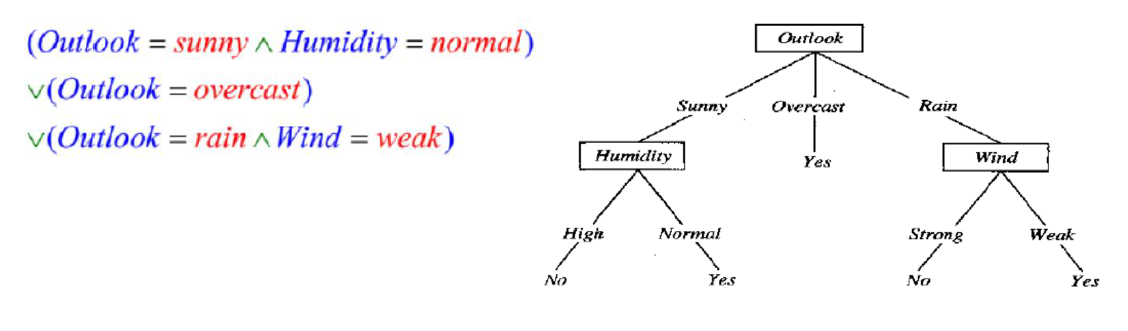
∙ 每一个叶子 产生一条规则,规则由根到该叶子的路径上所有节点的条件,规则的结论是叶子上标注的结论(决策,分类,判断)决策树规则 代表实例属性值约束的合取(交集)的析取(并集)式。从树根到树叶的每一条路径对应一组属性测试的合取 树本身对应这些合取的析取。下面给出Yes类的rules
∙
\bullet
∙ 分类树的叶子节点输出离散值,一般通过多数投票得到;回归树的叶子节点输出连续值,一般通过取均值得到
∙
\bullet
∙ 一些优缺点
- 解释性好,也更加符合人的决策方式。深度学习的一个为人诟病的点就是解释不了,你只知道最终分类的结果,但是不知道分类的依据,为什么这么分。在某些领域,如人脸识别,我们只关心是不是人脸,至于怎么分的我们不是很关心;但是如果在医疗诊断领域,机器判断出病人有癌症,但是依据是什么不知道,我们可能就无法接受了。
- 树可以用图来表示,形象直观,更加容易理解
- 构建树相对容易
- 对新样本进行分类时速度很快
- 分类精度比起其他分类器较低
∙
\bullet
∙ 构建树的时候,我们关心在每个节点,选择什么样的属性来进行分叉。我们自然希望选一个“好”点的属性,能将样本尽可能地分开,那么如何衡量一个属性好不好呢?
∙
\bullet
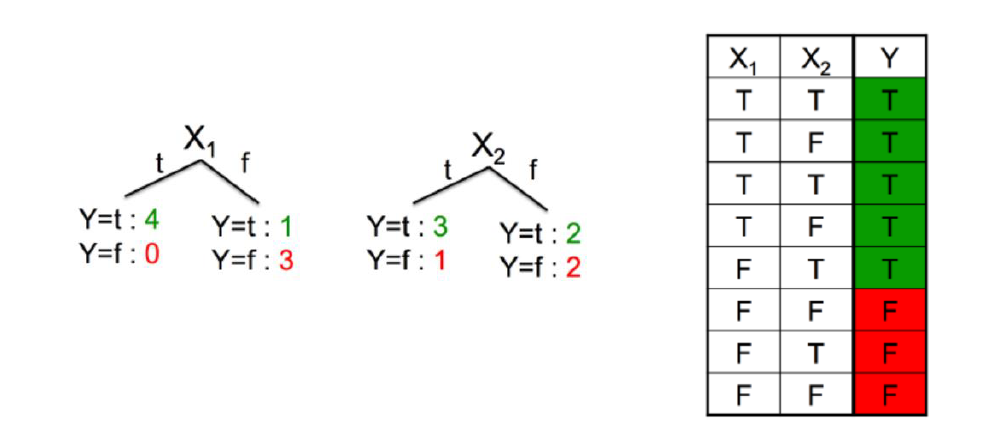
∙ 直觉告诉我们属性
X
1
X_1
X1更好一些,因为分叉后,不确定性减少了。左边的全是正样本,而右边负样本的概率很大。衡量不确定性可以用熵
P
(
X
=
x
i
)
=
p
i
,
i
=
1
,
2
,
⋯
,
n
H
(
X
)
=
−
∑
i
=
1
n
p
i
log
p
i
P\left(X=x_i\right)=p_i, \quad i=1,2, \cdots, n\\ H(X)=-\sum_{i=1}^n p_i \log p_i
P(X=xi)=pi,i=1,2,⋯,nH(X)=−i=1∑npilogpi
∙
\bullet
∙ 假如随机变量
X
X
X只取两个值
0
,
1
0,1
0,1
P
(
X
=
1
)
=
p
,
P
(
X
=
0
)
=
1
−
p
,
0
⩽
p
⩽
1
H
(
p
)
=
−
p
log
2
p
−
(
1
−
p
)
log
2
(
1
−
p
)
P(X=1)=p, \quad P(X=0)=1-p, \quad 0 \leqslant p \leqslant 1\\ H(p)=-p \log _2 p-(1-p) \log _2(1-p)
P(X=1)=p,P(X=0)=1−p,0⩽p⩽1H(p)=−plog2p−(1−p)log2(1−p)

∙
\bullet
∙ 可以想象,当一个随机变量取每一个值的概率都相等,其不确定性最大,熵最大
设有随机变量
(
X
,
Y
)
(X, Y)
(X,Y), 其联合概率分布为
条件熵
P
(
X
=
x
i
,
Y
=
y
j
)
=
p
i
j
,
i
=
1
,
2
,
⋯
,
n
;
j
=
1
,
2
,
⋯
,
m
P\left(X=x_i, Y=y_j\right)=p_{i j}, \quad i=1,2, \cdots, n ; \quad j=1,2, \cdots, m
P(X=xi,Y=yj)=pij,i=1,2,⋯,n;j=1,2,⋯,m
条件樀
H
(
Y
∣
X
)
H(Y \mid X)
H(Y∣X) 表示在已知随机变量
X
X
X 的条件下随机变量
Y
Y
Y 的不确定性. 随机变 量
X
X
X 给定的条件下随机变量
Y
Y
Y 的条件熵 (conditional entropy)
H
(
Y
∣
X
)
H(Y \mid X)
H(Y∣X), 定义为
X
X
X 给定条件下
Y
Y
Y 的条件概率分布的熵对
X
X
X 的数学期望
H
(
Y
∣
X
)
=
∑
i
=
1
n
p
i
H
(
Y
∣
X
=
x
i
)
p
i
=
P
(
X
=
x
i
)
,
i
=
1
,
2
,
⋯
,
n
H(Y \mid X)=\sum_{i=1}^n p_i H\left(Y \mid X=x_i\right)\\ p_i=P\left(X=x_i\right), \quad i=1,2, \cdots, n
H(Y∣X)=i=1∑npiH(Y∣X=xi)pi=P(X=xi),i=1,2,⋯,n
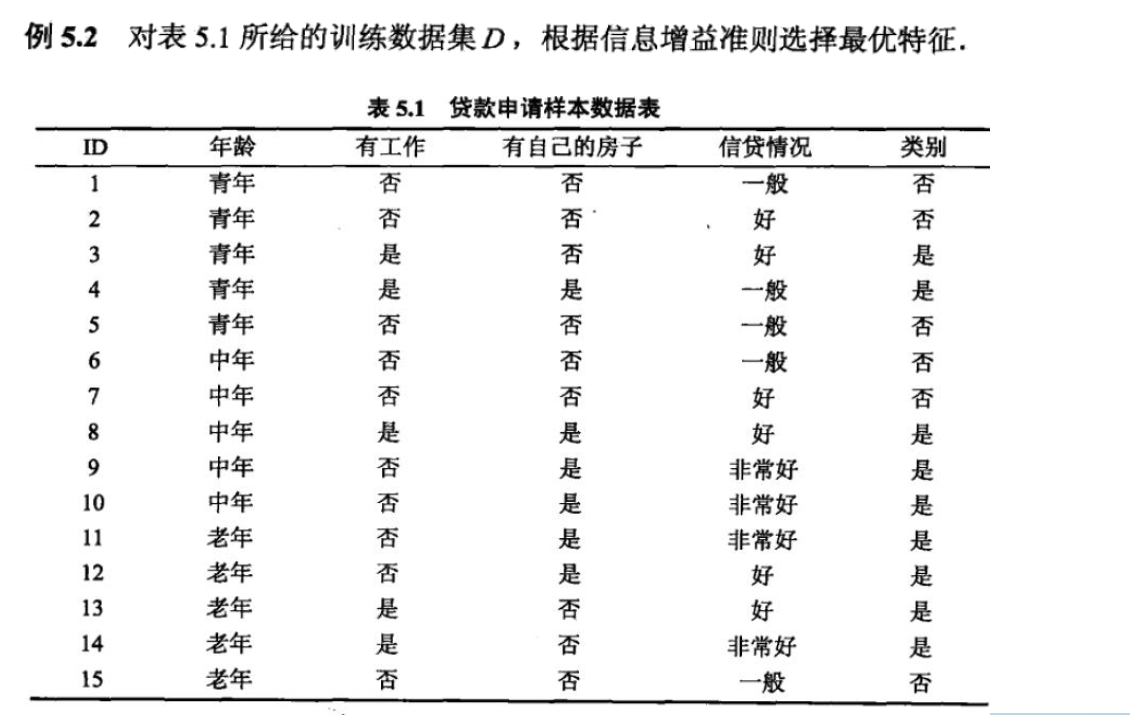
信息增益(information gain)表示得知特征
X
X
X 的信息而使得类
Y
Y
Y 的信息的不 确定性减少的程度.
信息增益
定义 (信息增益): 特征
A
A
A 对训练数据集
D
D
D 的信息增益
g
(
D
,
A
)
g(D, A)
g(D,A), 定义为 集合
D
D
D 的经验熵
H
(
D
)
H(D)
H(D) 与特征
A
A
A 给定条件下
D
D
D 的经验条件樀
H
(
D
∣
A
)
H(D \mid A)
H(D∣A) 之差, 即
g
(
D
,
A
)
=
H
(
D
)
−
H
(
D
∣
A
)
g(D, A)=H(D)-H(D \mid A)
g(D,A)=H(D)−H(D∣A)
一般地, 熵
H
(
Y
)
H(Y)
H(Y) 与条件熵
H
(
Y
∣
X
)
H(Y \mid X)
H(Y∣X) 之差称为互信息 (mutual information). 决 策树学习中的信息增益等价于训练数据集中类与特征的互信息.
根据信息增益准则的特征选择方法是: 对训练数据集 (或子集) D D D, 计算其 每个特征的信息增益, 并比较它们的大小, 选择信息增益最大的特征.
算法 (信息增益的算法)
输入: 训练数据集
D
D
D 和特征
A
A
A;
输出:特征
A
A
A 对训练数据集
D
D
D 的信息增益
g
(
D
,
A
)
g(D, A)
g(D,A).
-
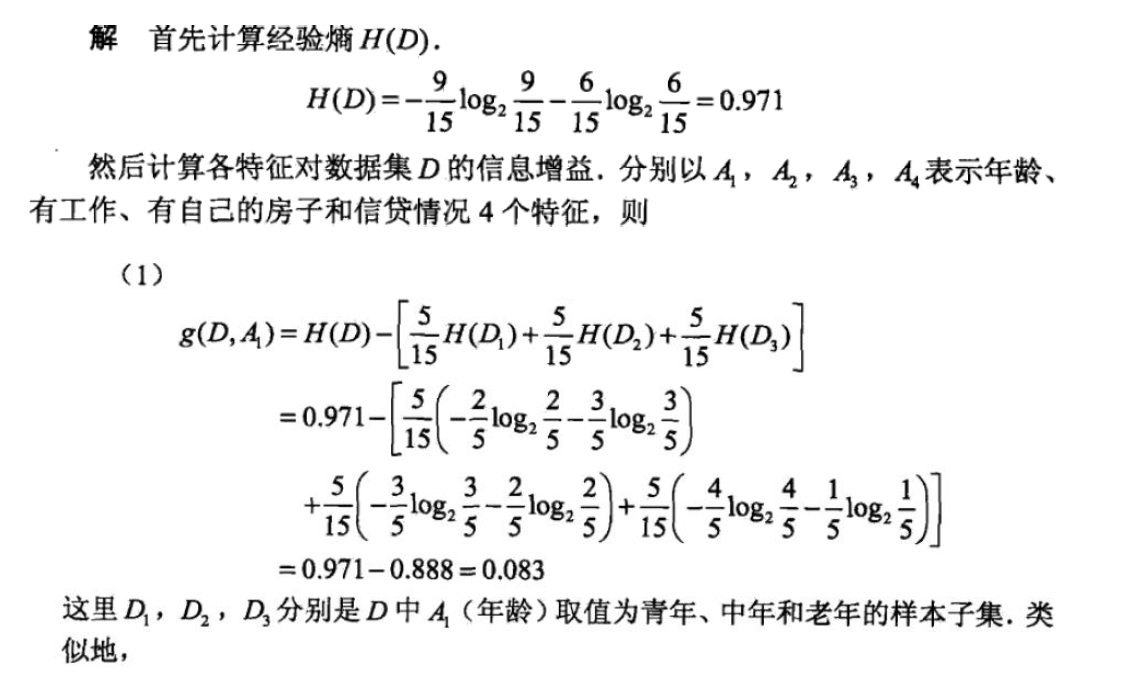
计算数据集 D D D 的经验熵 H ( D ) H(D) H(D)
H ( D ) = − ∑ k = 1 K ∣ C k ∣ ∣ D ∣ log 2 ∣ C k ∣ ∣ D ∣ H(D)=-\sum_{k=1}^K \frac{\left|C_k\right|}{|D|} \log _2 \frac{\left|C_k\right|}{|D|} H(D)=−k=1∑K∣D∣∣Ck∣log2∣D∣∣Ck∣ -
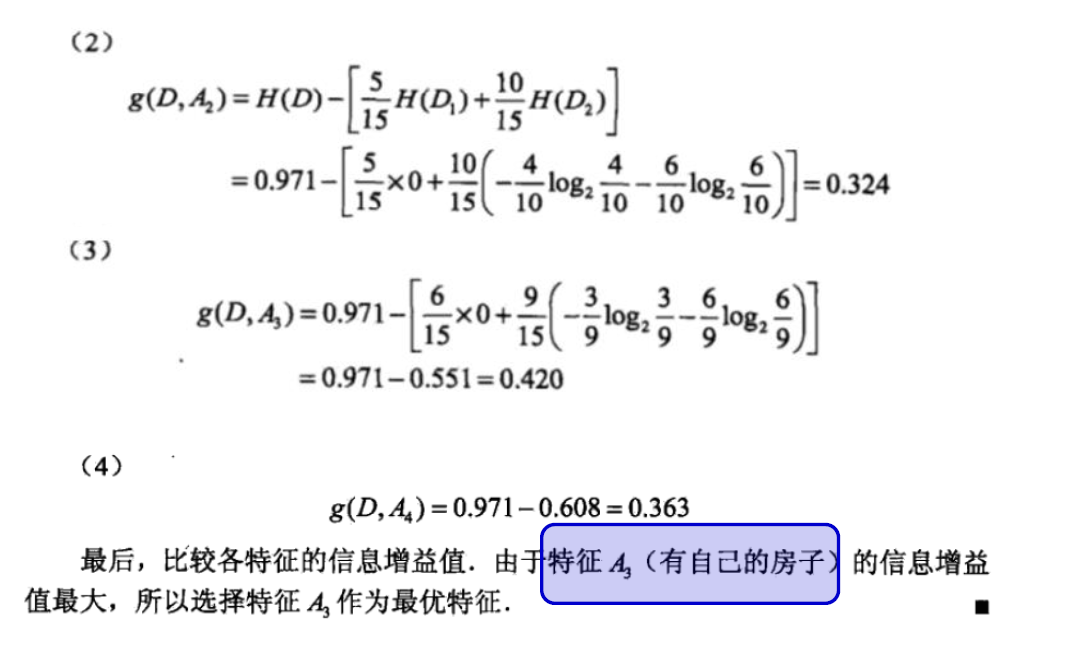
计算特征 A A A 对数据集 D D D 的经验条件樀 H ( D ∣ A ) H(D \mid A) H(D∣A)
H ( D ∣ A ) = ∑ i = 1 n ∣ D i ∣ ∣ D ∣ H ( D i ) = − ∑ i = 1 n ∣ D i ∣ ∣ D ∣ ∑ k = 1 K ∣ D i k ∣ ∣ D i ∣ log 2 ∣ D i k ∣ ∣ D i ∣ H(D \mid A)=\sum_{i=1}^n \frac{\left|D_i\right|}{|D|} H\left(D_i\right)=-\sum_{i=1}^n \frac{\left|D_i\right|}{|D|} \sum_{k=1}^K \frac{\left|D_{i k}\right|}{\left|D_i\right|} \log _2 \frac{\left|D_{i k}\right|}{\left|D_i\right|} H(D∣A)=i=1∑n∣D∣∣Di∣H(Di)=−i=1∑n∣D∣∣Di∣k=1∑K∣Di∣∣Dik∣log2∣Di∣∣Dik∣ -
计算信息增益
g ( D , A ) = H ( D ) − H ( D ∣ A ) g(D, A)=H(D)-H(D \mid A) g(D,A)=H(D)−H(D∣A)
∙ \bullet ∙ H ( D ) H(D) H(D)代表原来的不确定性, H ( D ∣ A ) H(D|A) H(D∣A)代表用属性 A A A进行分叉后的不确定性,两个相减就是用属性 A A A进行分叉可以减少的不确定性,也叫信息增益。条件熵我是这么理解的,属性将样本分为几个类,每个类都有一个概率(类样本除总样本),每一类都有一个熵(计算方法和 H ( D ) H(D) H(D)一样),条件熵是每个类的熵乘每个类的概率,最后求和