标定板
为什么需要标定板?
相机标定的第一篇笔记中提到了相机标定所使用的模型,标定算法中我们需要一些可靠的样本点,这些样本点由世界坐标系中的3D点和其在图像上的2D像点组成。用这些2D和3D点对来求解标定参数。为了构建更高精度的3D和2D点,就需要使用标定板。
标定板的基本要求
标定板的精度(平整度):3D点要求是共面的,标定点的坐标精度是准确的。
标定板的稳定性:降低温度膨胀系数。标定板的材质温度膨胀系数要尽可能小。
标定板的均匀性(背光源):要求标定板有背光的原因是尽量减少图像受环境光的干扰。
Pattern设计要求:
a. 便于特征点提取(如角点或圆心);
b. 特征点的坐标无歧义,比如对于棋盘格这种有规律的pattern,要求棋盘格图像整体的大小不要充满整个图像,比如只占拍摄图像的1/2。
关于b点,我们假设棋盘格图像是充满整个拍摄图像的,在双目视觉中,假设左右相机所拍摄到的画面如下图(仅做说明,并非真实情况):
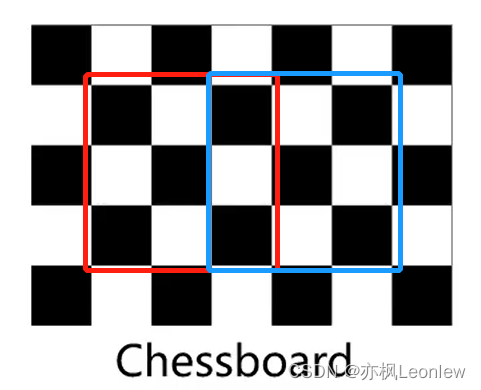
红色框框是左边相机所拍到的画面,蓝色框框是右边相机所拍到的画面。那么此时做左右画面的特征匹配的时候,由于棋盘格的规律性很强,此时匹配左右画面中相同的方块特征的时候,要找到匹配的方块是比较困难的,会误判。
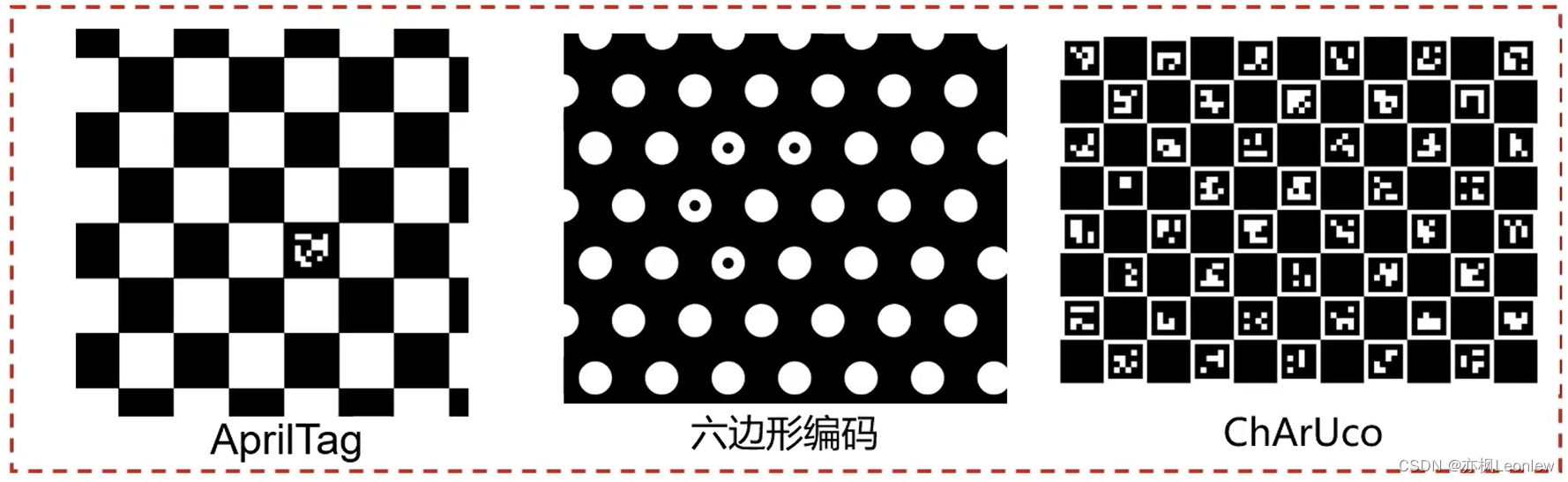
关于b点,还有一种做法是,在pattern设计上加入一些tag用于区分有规律的图像。要求在标定过程中这个tag一定要能被拍摄到用来做参考位置。具体例子如下图所示的一些带标记的标定板:
标定板对标定精度的影响
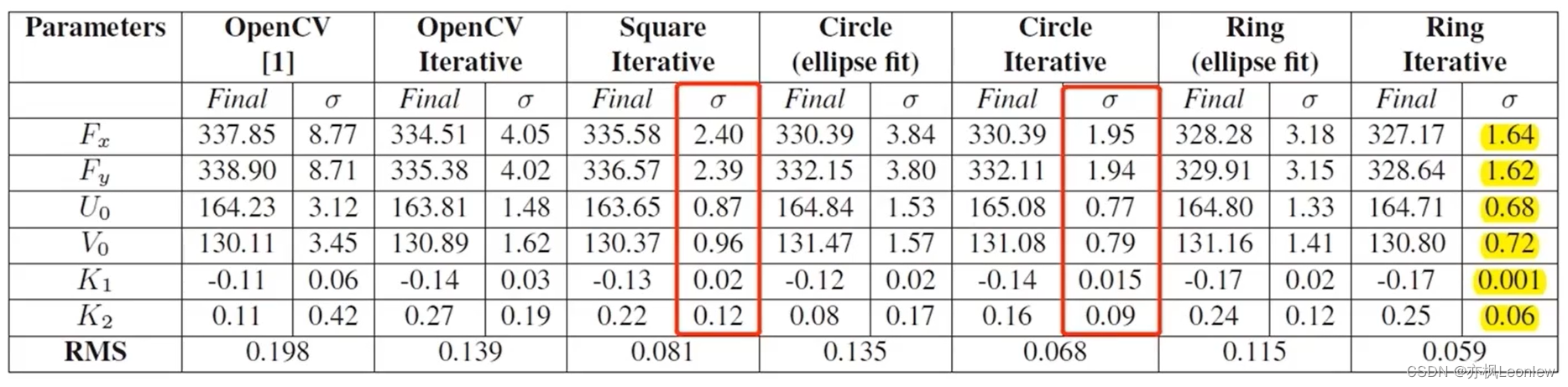
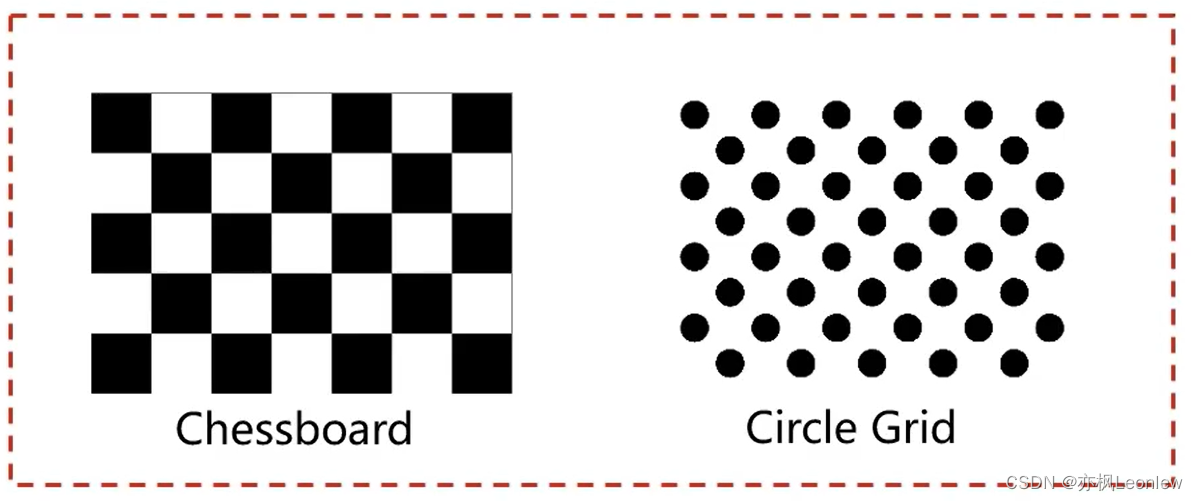
一般来讲,圆形(圆环)标定板的提取精度高于棋盘格的提取精度。主要原因是对于棋盘格来讲,边缘位置在实际相机所拍摄的图像来看,受到光的影响和sensor本身噪声影响,所得到的灰度可能会有明暗差别,导致计算棋盘格中心点位置的时候会有误差。而圆形或圆环的拟合中,半径多一点或少一点,对于圆心位置的计算影响相对较小。
参考论文:Accurate Camera Calibration using Iterative Refinement of Control Points
链接:https://www.ri.cmu.edu/pub_files/2009/10/Calib.pdf
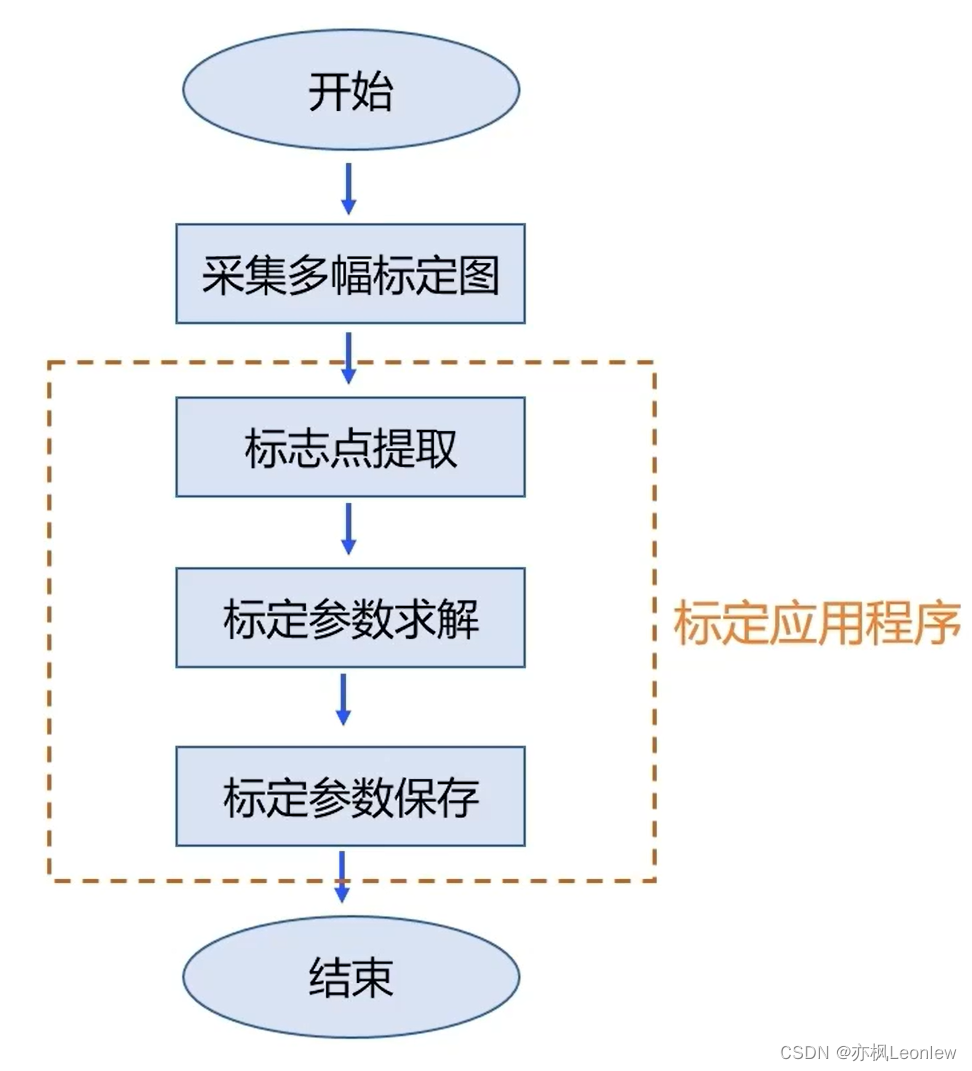
标定步骤
标定结果评估
主要关注标定精度和鲁棒性两方面
对于标定精度,常见评估方法有:
重投影误差
对于双目:可以采用极线校正的精度进行评估
对于结构光:图像校正的精度
针对标准件的3D重建的精度(如标定板)。通过将图像坐标系的2D点反投影到相机坐标系中,计算标准件特征(比如两个圆心的距离)的物理距离。看看和标准件的实际距离的差异。
关于重投影误差的参考资料,可以参考这篇文章:
一文读懂重投影误差_少杰很帅的博客-CSDN博客_重投影误差重投影误差1、重投影误差的作用在计算机视觉中,经常会用到重投影误差(Reprojection error)。比如在计算平面单应矩阵和投影矩阵的时候,往往会使用重投影误差来构造代价函数,然后最小化这个代价函数,以优化单应矩阵或者投影矩阵。之所以使用重投影误差,是因为它不光考虑了单应矩阵的计算误差,也考虑了图像点的测量误差,所以其精度会更高。2、重投影误差的含义首先我们从字面意思来理解,重投影的意思就是第二次投影。有第二次投影,就有第一次投影。 其实第一次投影指的就是相机在拍照的时候三维空间点投影到https://blog.csdn.net/weixin_49804978/article/details/121922128