Geometry 1 (Introduction)
Ways to Represent Geometry
隐式 (Implicit) 几何
- 只告诉点满足某种约束或关系,并不给出实际的点,也就是说,定义
f ( x , y , z ) = 0 f(x,y,z) = 0 f(x,y,z)=0
- 例如,定义三维空间中的点,满足, x 2 + y 2 + z 2 = 1 x^2+y^2+z^2 = 1 x2+y2+z2=1
- 判断一个面有哪些点是困难的,判断一个点与面的位置关系是容易的
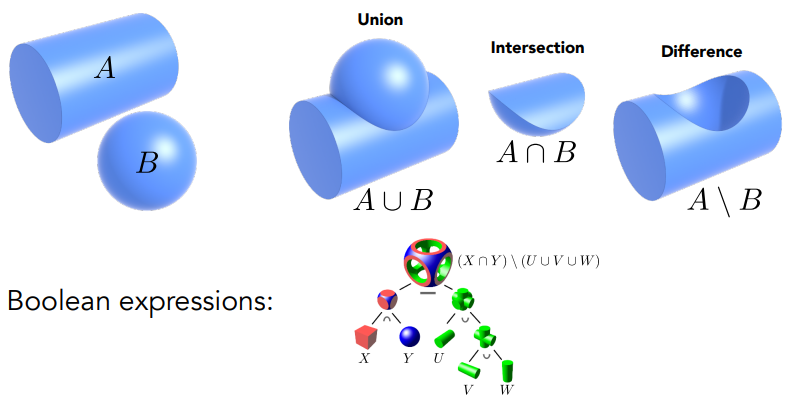
Constructive Solid Geometry
使用布尔运算拼接基本几何体
Distance Functions
对于任何一个几何,不描述它的表面,描述空间中的任何一个点到这个表面的任意点最近距离(可以是正的或者负的)
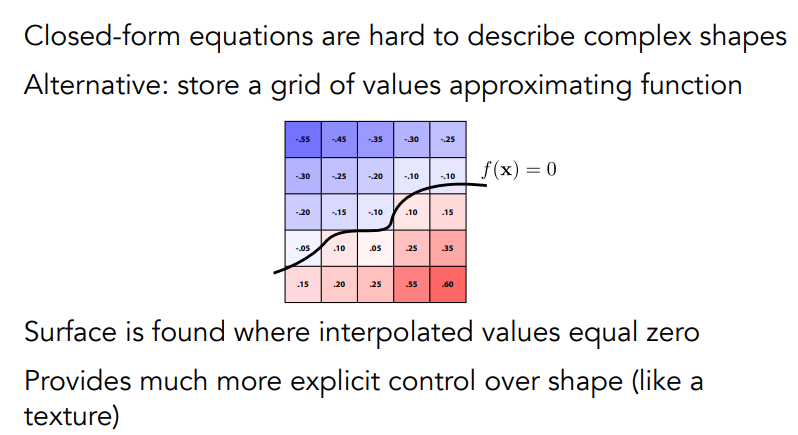
Level Set Methods
找到 f ( x ) = 0 f(x)=0 f(x)=0 的曲线就是物体的边界
Fractals 分形
自相似,自己和自己的某个部分非常像

Implicit Representations‘ Pros & Cons
Pros:
- compact description (e.g., a function)
- certain queries easy (inside object, distance to surface)
- good for ray-to-surface intersection (more later) :和光线求交容易
- for simple shapes, exact description / no sampling error
- easy to handle changes in topology (e.g., fluid)
Cons:
- difficult to model complex shapes
显式 (Explicit) 几何
- 通过参数映射的方式定义空间中的点
f : R 2 → R 3 ; ( u , v ) ↦ ( x , y , z ) f: \mathbb{R}^2 \rightarrow \mathbb{R}^3 ;(u, v) \mapsto(x, y, z) f:R2→R3;(u,v)↦(x,y,z)
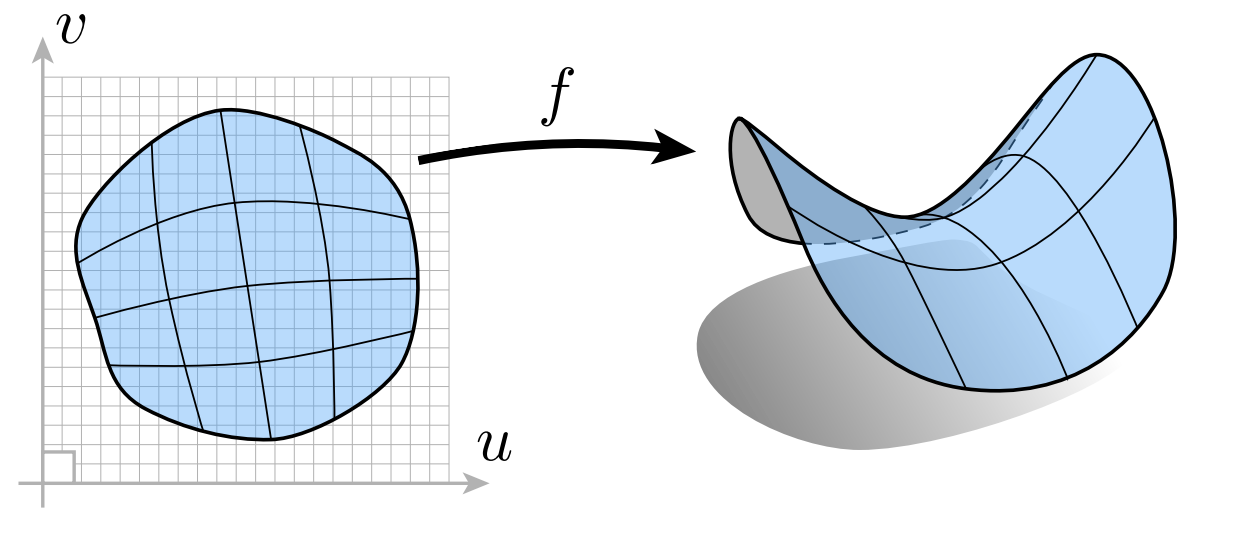
- 判断一个面有哪些点是容易的,判断一个点与面的位置关系是困难的
Point Cloud 点云
- 使用 ( x , y , z ) (x,y,z) (x,y,z) 的列表表示点
- 经常需要将点云转化成三角形面
Polygon Mesh
- 使用多边形(尤其是三角形存储)
- 在图形学中得到最广泛应用的显式表示
The Wavefront Object File (.obj) Format
- 描述空间中的点、法线、材质、坐标、连接关系的文本文件




![[附源码]Python计算机毕业设计bugbase管理系统](https://img-blog.csdnimg.cn/28c2e62ecf58470d83180aee53d3b8ed.png)


![[附源码]java毕业设计篮球俱乐部管理系统](https://img-blog.csdnimg.cn/c7ba9786349743e9a8038e5fab5f888c.png)



