文章目录
- 前言
- 一、I2C协议
- 1、应用
- 2、组成
- 3、软件I2C和硬件I2C
- 3.1软件I2C
- 3.2硬件I2C
- 二、通过硬件I2C协议采集AHT20的数据
- 1、配置项目
- 2、配置代码
- 三、效果
- 四、总结
- 五、参考资料
前言
- 硬件:stm32f103c8t6 核心板
- 软件:STM32CubeMX 6.4.0
- 软件:keil5 mdk
- 软件:野火串口调试助手
一、I2C协议
1、应用
I2C 通讯协议(Inter-Integrated Circuit)是由 Phiilps 公司开发的,由于它引脚少,硬件实现简单,可扩展性强,不需要 USART、CAN 等通讯协议的外部收发设备,现在被广泛地
使用在系统内多个集成电路(IC)间的通讯。
2、组成
最基本的是把它分为物理层和协议层。
物理层规定通讯系统中具有机械、电子功能部分的特性,确保原始数据在物理媒体的传输。
协议层主要规定通讯逻辑,统一收发双方的数据打包、解包标准。简单来说物理层规定我们用嘴巴还是用肢体来交流,协议层则规定我们用中文还是英文来交流。
- I2C 通讯设备之间的常用连接方式
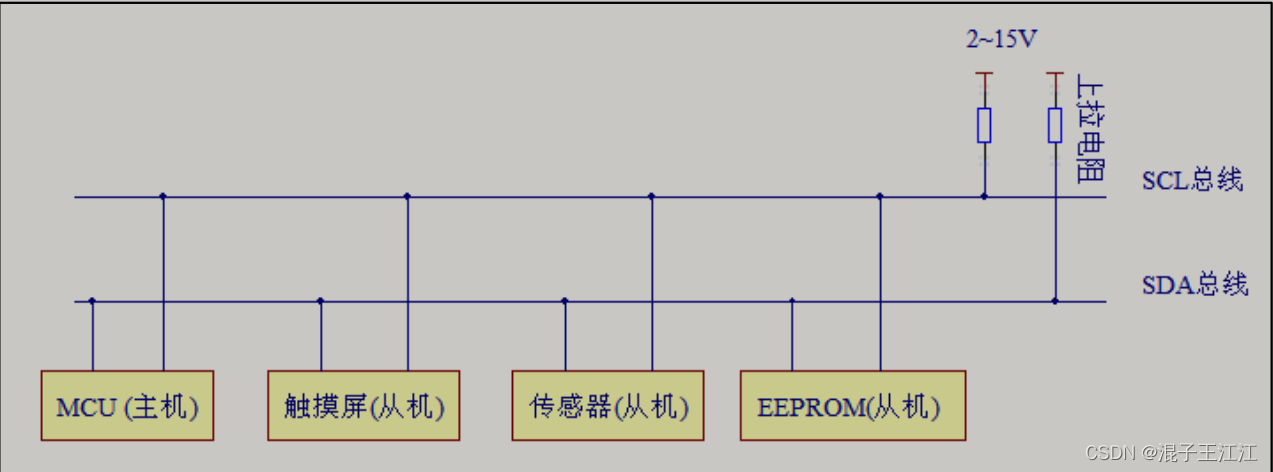
- 物理层
I2C是一个支持设备的总线。可连接多个 I2C 通讯设备,支持多个通讯主机及多个通讯从机。对于I2C 总线,只使用两条总线线路,一条双向串行数据线(SDA) ,一条串行时钟线(SCL)。
- 协议层
I2C 的协议定义了通讯的起始和停止信号、数据有效性、响应、仲裁、时钟同步和地址广播等环节。
- STM32的I2C架构:

- 通讯的起止:
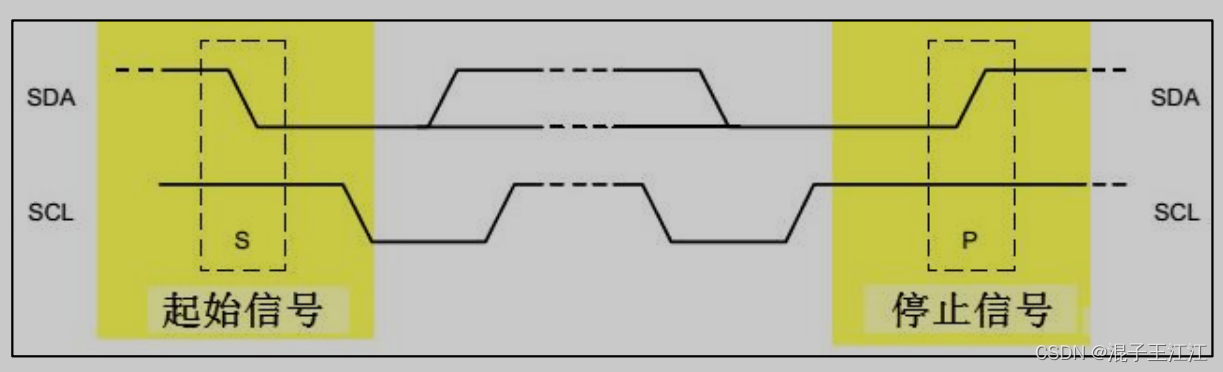
当 SCL 线是高电平时 SDA 线从高电平向低电平切换,这个情况表示通讯的起始。当 SCL 是高电平时 SDA 线由低电平向高电平切换,表示通讯的停止。起始和停止信号一般由主机产生。
- 数据的有效性
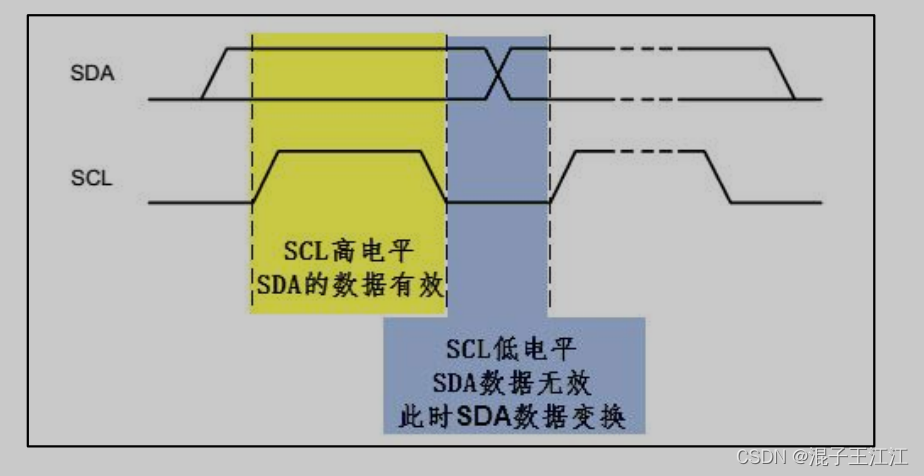
SDA 数据线在 SCL的每个时钟周期传输一位数据。传输时,SCL为高电平的时候 SDA表示的数据有效,即此时的 SDA为高电平时表示数据“1”,为低电平时表示数据“0”。当 SCL为低电平时,SDA的数据无效,一般在这个时候 SDA进行电平切换,为下一次表示数据做好准备。
- 响应
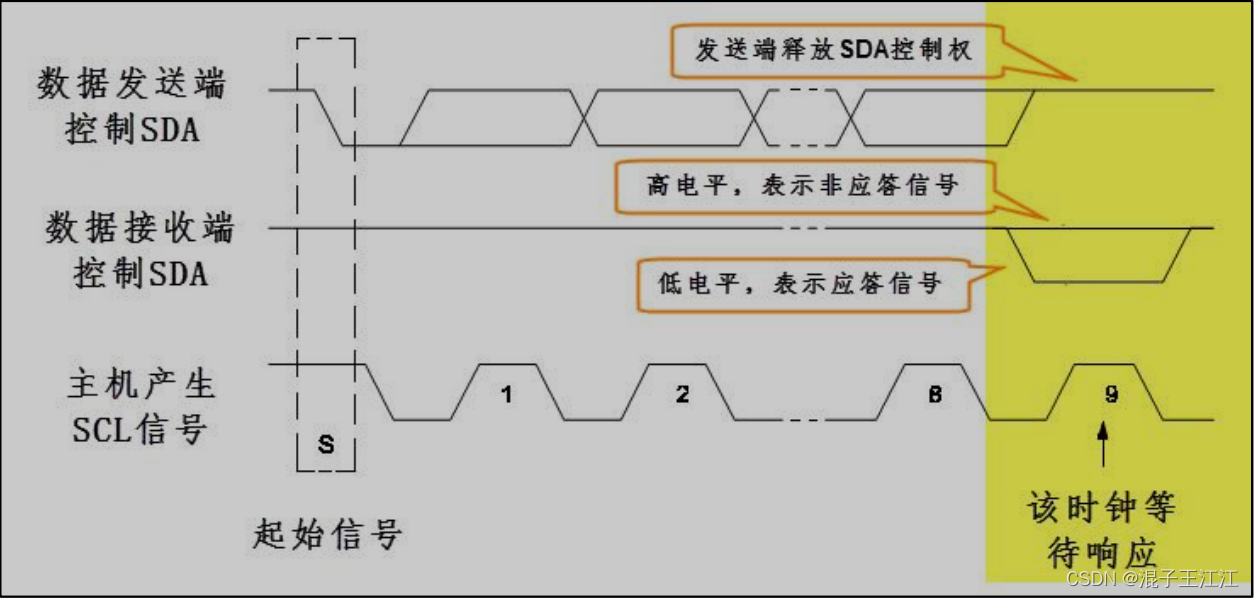
I2C 的数据和地址传输都带响应。响应包括“应答(ACK)”和“非应答(NACK)”两种信号。作为数据接收端时,当设备(无论主从机)接收到 I2C 传输的一个字节数据或地址后,若希望对方继续发送数据需要向对方发送“应答(ACK)”信号,发送方会继续发送下一个数据;若接收端希望结束数据传输,则向对方发送“非应答(NACK)”信号,发送方接收到该信号后会产生一个停止信号,结束信号传输。
3、软件I2C和硬件I2C
3.1软件I2C
通过CPU 控制每个时刻的引脚状态来控制 GPIO 引脚电平产生通讯时序的方式称为软件I2C。
3.2硬件I2C
STM32 的 I2C 片上外设专门负责实现 I2C 通讯协议,只要配置好该外设,它就会自动根据协议要求产生通讯信号,收发数据并缓存起来,CPU只要检测该外设的状态和访问数据寄存器,就能完成数据收发。这种通过外设进行数据收发的方式称为硬件I2C。
- 差别
硬件 I2C 直接使用外设来控制引脚,可以减轻 CPU 的负担。不过使用硬件I2C 时必须使用某些固定的引脚作为 SCL 和 SDA,软件模拟 I2C 则可以使用任意 GPIO 引脚,相对比较灵活。对于硬件I2C用法比较复杂,软件I2C的流程更清楚一些。如果要详细了解I2C的协议,使用软件I2C可能更好的理解这个过程。在使用I2C过程,硬件I2C可能通信更加快,更加稳定。
二、通过硬件I2C协议采集AHT20的数据
1、配置项目
默认你已经创建了一个新项目
- 时钟RCC配置,将HSE选为外部晶振模式

- SYS设置,选择Serial Wire模式。

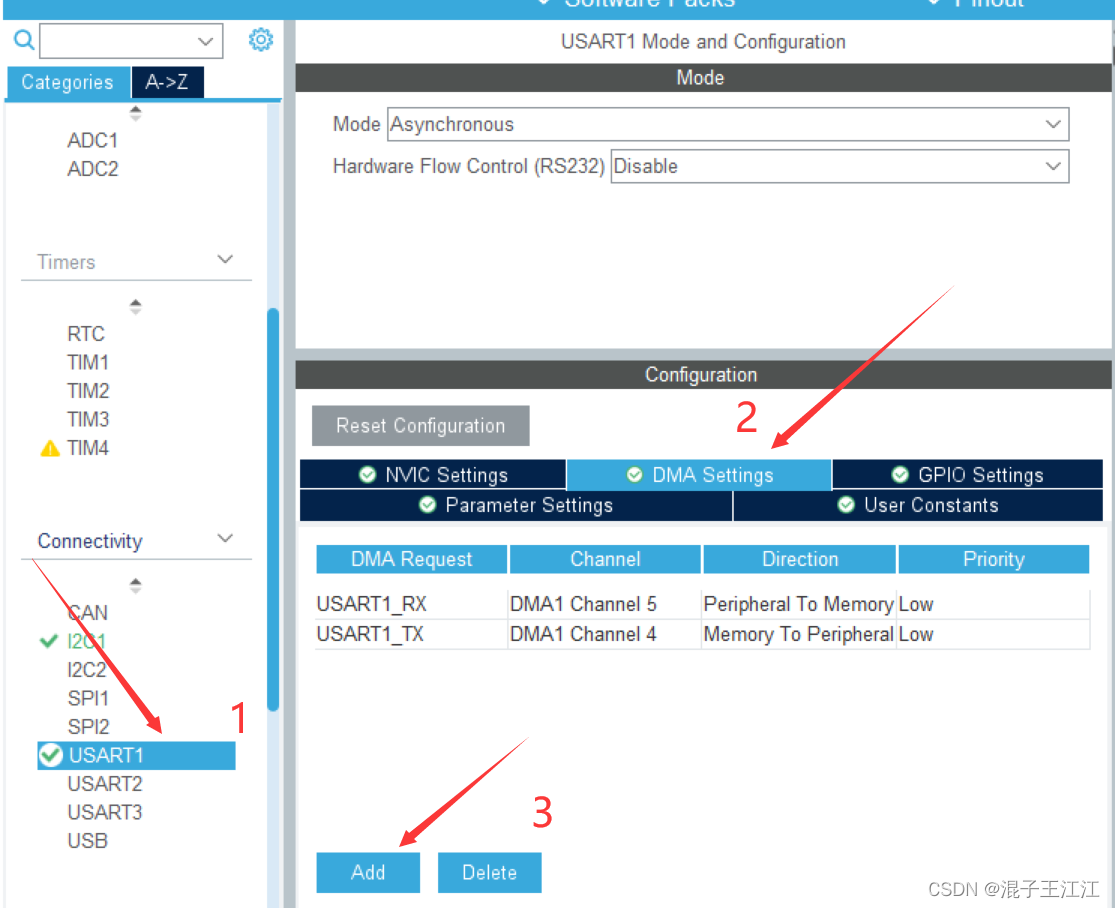
- 设置USART

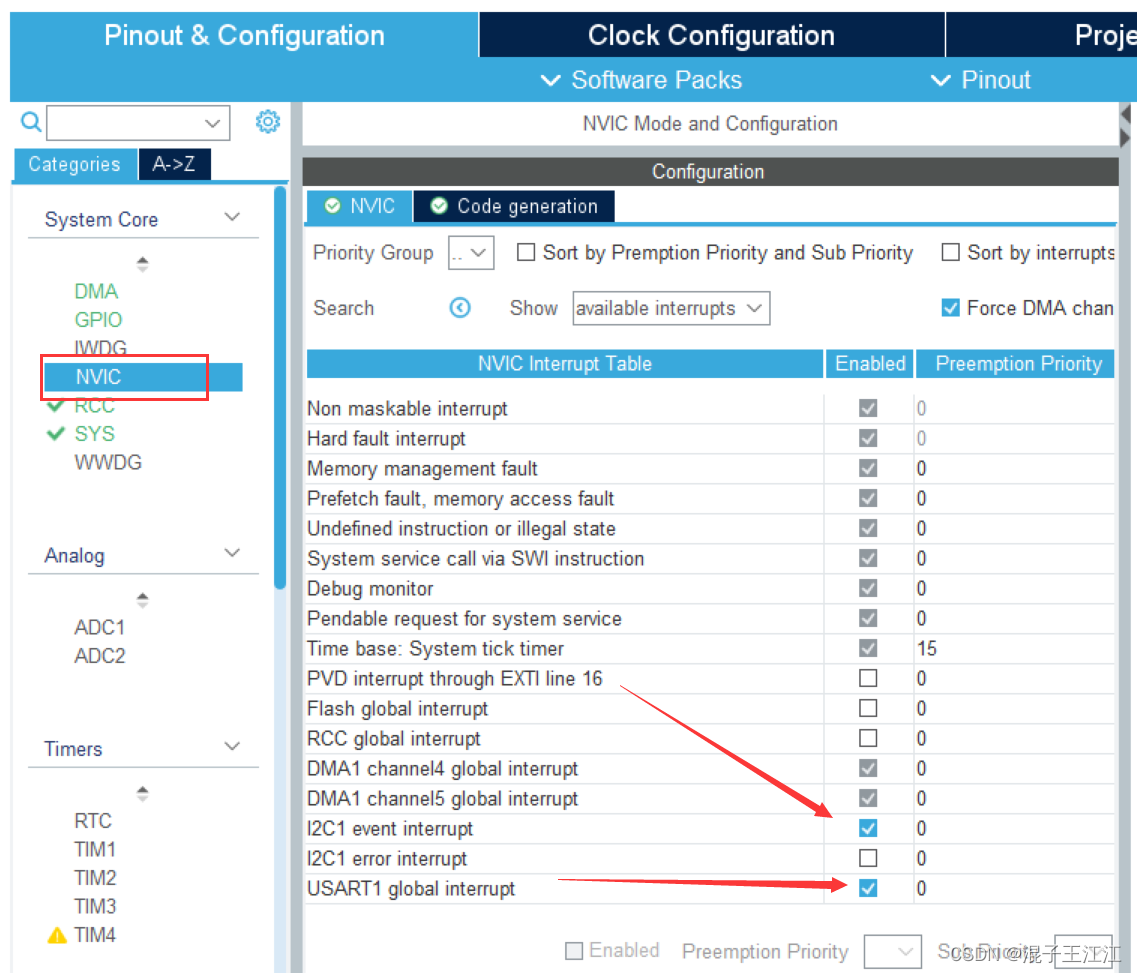
- 设置允许中断
- I2C设置

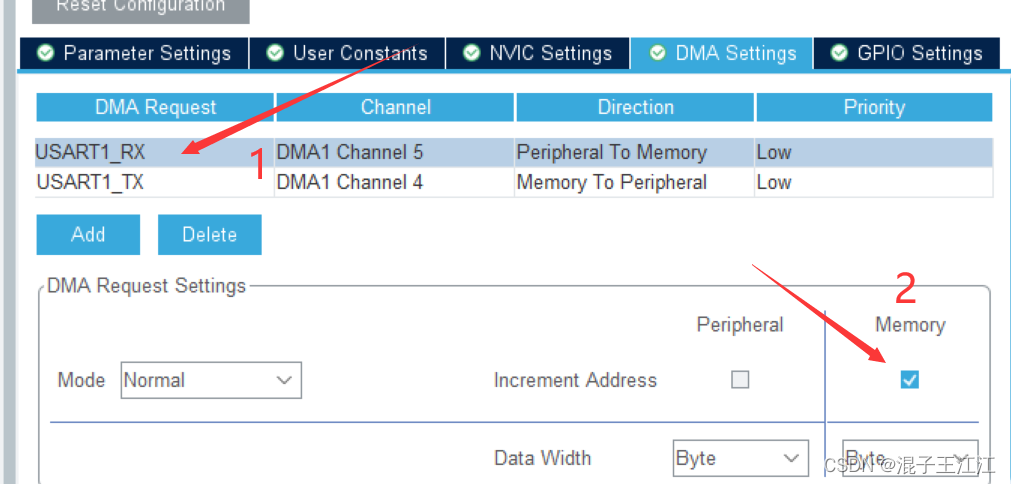
- 设置DMA模式
- RCC时钟

设置工程路径、工程名,最后导出文件。使用keil打开并进行编写。
2、配置代码
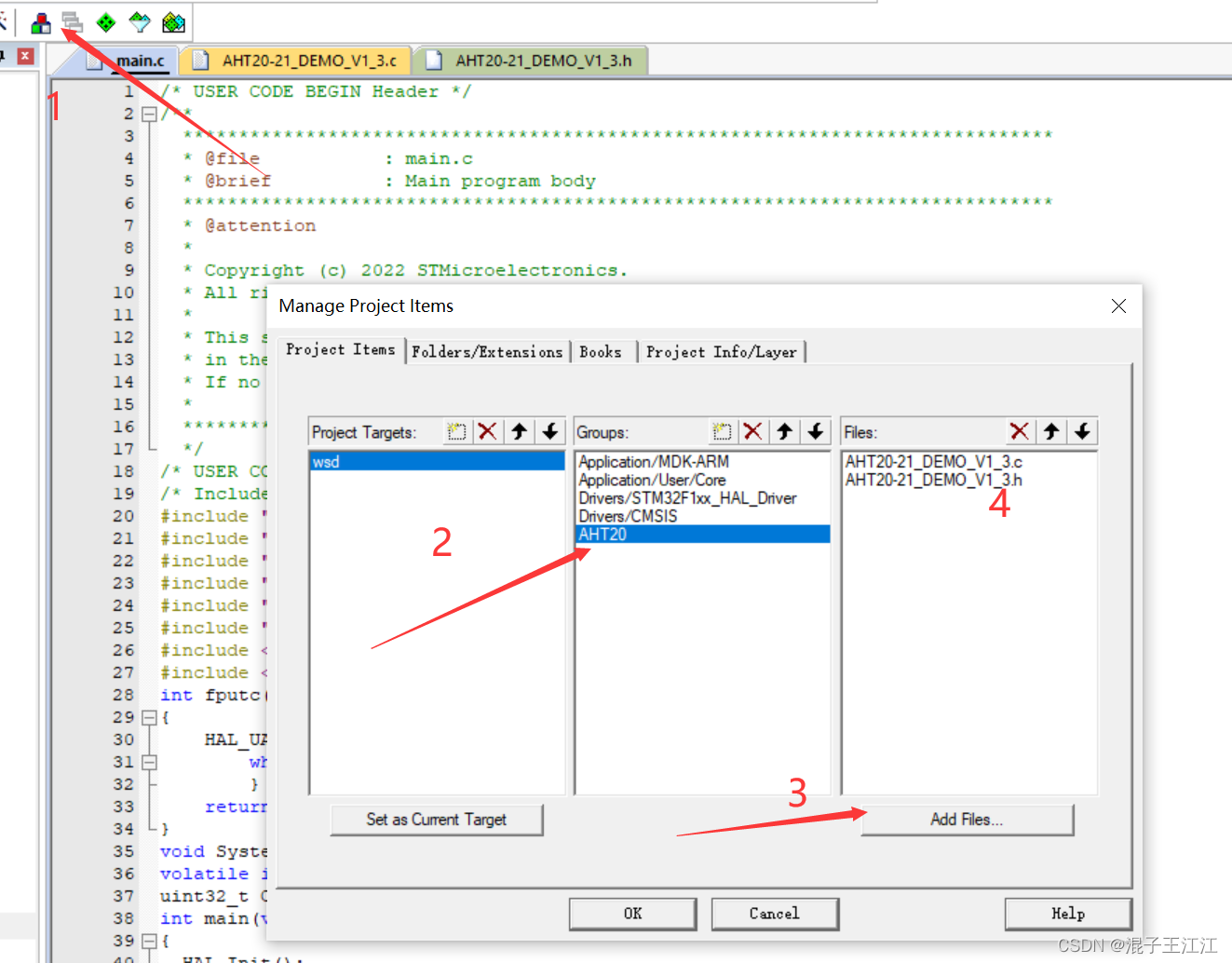
- 新建一个文件夹,里面放置两个文件:
AHT20-21_DEMO_V1_3.c和AHT20-21_DEMO_V1_3.h
然后通过小方块创建一个工程文件夹,将刚刚的两个文件添加进来,后面需要进行修改.
- 导入文件路径
复制前面新建的文件夹路径

设置文件路径
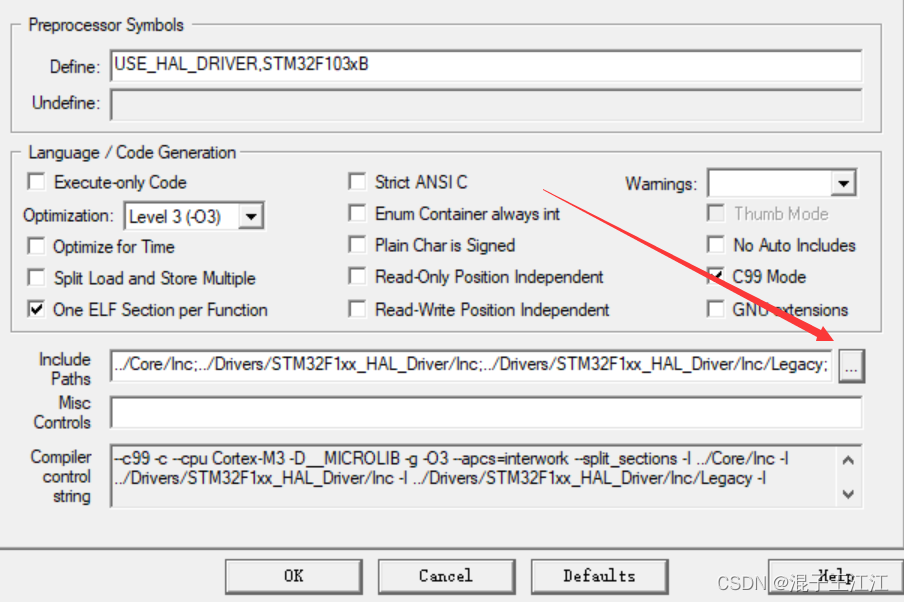
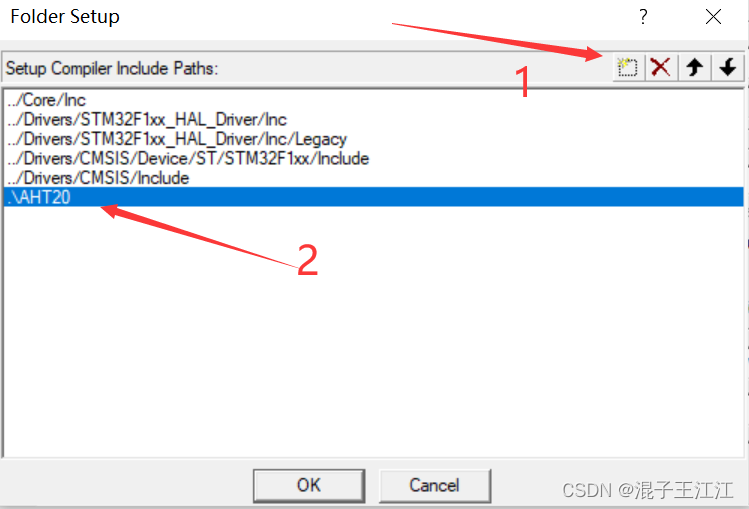
将刚刚文件路径放在最后步骤2那里,然后一致点击ok返回。
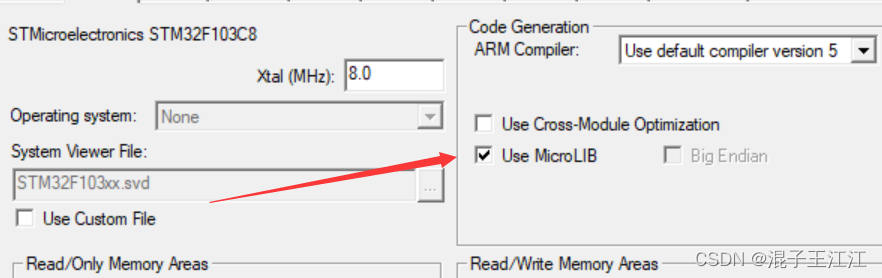
-
因为后面重写了prntf函数,需要勾选允许微库。
-
修改AHT20-21_DEMO_V1_3.h文件
#ifndef _AHT20_DEMO_
#define _AHT20_DEMO_
#include "main.h"
void Delay_N10us(uint32_t t);//延时函数
void SensorDelay_us(uint32_t t);//延时函数
void Delay_4us(void); //延时函数
void Delay_5us(void); //延时函数
void Delay_1ms(uint32_t t);
void AHT20_Clock_Init(void); //延时函数
void SDA_Pin_Output_High(void) ; //将PB15配置为输出 , 并设置为高电平, PB15作为I2C的SDA
void SDA_Pin_Output_Low(void); //将P15配置为输出 并设置为低电平
void SDA_Pin_IN_FLOATING(void); //SDA配置为浮空输入
void SCL_Pin_Output_High(void); //SCL输出高电平,P14作为I2C的SCL
void SCL_Pin_Output_Low(void); //SCL输出低电平
void Init_I2C_Sensor_Port(void); //初始化I2C接口,输出为高电平
void I2C_Start(void); //I2C主机发送START信号
void AHT20_WR_Byte(uint8_t Byte); //往AHT20写一个字节
uint8_t AHT20_RD_Byte(void);//从AHT20读取一个字节
uint8_t Receive_ACK(void); //看AHT20是否有回复ACK
void Send_ACK(void) ; //主机回复ACK信号
void Send_NOT_ACK(void); //主机不回复ACK
void Stop_I2C(void); //一条协议结束
uint8_t AHT20_Read_Status(void);//读取AHT20的状态寄存器
uint8_t AHT20_Read_Cal_Enable(void); //查询cal enable位有没有使能
void AHT20_SendAC(void); //向AHT20发送AC命令
uint8_t Calc_CRC8(uint8_t *message,uint8_t Num);
void AHT20_Read_CTdata(uint32_t *ct); //没有CRC校验,直接读取AHT20的温度和湿度数据
void AHT20_Read_CTdata_crc(uint32_t *ct); //CRC校验后,读取AHT20的温度和湿度数据
void AHT20_Init(void); //初始化AHT20
void JH_Reset_REG(uint8_t addr);///重置寄存器
void AHT20_Start_Init(void);///上电初始化进入正常测量状态
#endif
- 修改AHT20-21_DEMO_V1_3.c文件
/*******************************************/
/*@版权所有:广州奥松电子有限公司 */
/*@作者:温湿度传感器事业部 */
/*@版本:V1.2 */
/*******************************************/
//#include "main.h"
#include "AHT20-21_DEMO_V1_3.h"
#include "gpio.h"
#include "i2c.h"
void Delay_N10us(uint32_t t)//延时函数
{
uint32_t k;
while(t--)
{
for (k = 0; k < 2; k++);//110
}
}
void SensorDelay_us(uint32_t t)//延时函数
{
for(t = t-2; t>0; t--)
{
Delay_N10us(1);
}
}
void Delay_4us(void) //延时函数
{
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
}
void Delay_5us(void) //延时函数
{
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
Delay_N10us(1);
}
void Delay_1ms(uint32_t t) //延时函数
{
while(t--)
{
SensorDelay_us(1000);//延时1ms
}
}
//void AHT20_Clock_Init(void) //延时函数
//{
// RCC_APB2PeriphClockCmd(CC_APB2Periph_GPIOB,ENABLE);
//}
void SDA_Pin_Output_High(void) //将PB7配置为输出 , 并设置为高电平, PB7作为I2C的SDA
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//推挽输出
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB,& GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_7,GPIO_PIN_SET);
}
void SDA_Pin_Output_Low(void) //将P7配置为输出 并设置为低电平
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//推挽输出
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB,& GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_7,GPIO_PIN_RESET);
}
void SDA_Pin_IN_FLOATING(void) //SDA配置为浮空输入
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;//浮空
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init( GPIOB,&GPIO_InitStruct);
}
void SCL_Pin_Output_High(void) //SCL输出高电平,P14作为I2C的SCL
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_SET);
}
void SCL_Pin_Output_Low(void) //SCL输出低电平
{
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_RESET);
}
void Init_I2C_Sensor_Port(void) //初始化I2C接口,输出为高电平
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//推挽输出
GPIO_InitStruct.Pin = GPIO_PIN_7;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB,& GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_15,GPIO_PIN_SET);
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;//推挽输出
GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOB,& GPIO_InitStruct);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_15,GPIO_PIN_SET);
}
void I2C_Start(void) //I2C主机发送START信号
{
SDA_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
}
void AHT20_WR_Byte(uint8_t Byte) //往AHT20写一个字节
{
uint8_t Data,N,i;
Data=Byte;
i = 0x80;
for(N=0;N<8;N++)
{
SCL_Pin_Output_Low();
Delay_4us();
if(i&Data)
{
SDA_Pin_Output_High();
}
else
{
SDA_Pin_Output_Low();
}
SCL_Pin_Output_High();
Delay_4us();
Data <<= 1;
}
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
}
uint8_t AHT20_RD_Byte(void)//从AHT20读取一个字节
{
uint8_t Byte,i,a;
Byte = 0;
SCL_Pin_Output_Low();
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
for(i=0;i<8;i++)
{
SCL_Pin_Output_High();
Delay_5us();
a=0;
//if(GPIO_ReadInputDataBit(GPIOB,GPIO_Pin_15)) a=1;
if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7)) a=1;
Byte = (Byte<<1)|a;
//SCL_Pin_Output_Low();
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_RESET);
Delay_5us();
}
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
return Byte;
}
uint8_t Receive_ACK(void) //看AHT20是否有回复ACK
{
uint16_t CNT;
CNT = 0;
SCL_Pin_Output_Low();
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
while((HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_7)) && CNT < 100)
CNT++;
if(CNT == 100)
{
return 0;
}
SCL_Pin_Output_Low();
SensorDelay_us(8);
return 1;
}
void Send_ACK(void) //主机回复ACK信号
{
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_IN_FLOATING();
SensorDelay_us(8);
}
void Send_NOT_ACK(void) //主机不回复ACK
{
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SCL_Pin_Output_Low();
SensorDelay_us(8);
SDA_Pin_Output_Low();
SensorDelay_us(8);
}
void Stop_I2C(void) //一条协议结束
{
SDA_Pin_Output_Low();
SensorDelay_us(8);
SCL_Pin_Output_High();
SensorDelay_us(8);
SDA_Pin_Output_High();
SensorDelay_us(8);
}
uint8_t AHT20_Read_Status(void)//读取AHT20的状态寄存器
{
uint8_t Byte_first;
I2C_Start();
AHT20_WR_Byte(0x71);
Receive_ACK();
Byte_first = AHT20_RD_Byte();
Send_NOT_ACK();
Stop_I2C();
return Byte_first;
}
uint8_t AHT20_Read_Cal_Enable(void) //查询cal enable位有没有使能
{
uint8_t val = 0;//ret = 0,
val = AHT20_Read_Status();
if((val & 0x68)==0x08)
return 1;
else return 0;
}
void AHT20_SendAC(void) //向AHT20发送AC命令
{
I2C_Start();
AHT20_WR_Byte(0x70);
Receive_ACK();
AHT20_WR_Byte(0xac);//0xAC采集命令
Receive_ACK();
AHT20_WR_Byte(0x33);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
}
//CRC校验类型:CRC8/MAXIM
//多项式:X8+X5+X4+1
//Poly:0011 0001 0x31
//高位放到后面就变成 1000 1100 0x8c
//C现实代码:
uint8_t Calc_CRC8(uint8_t *message,uint8_t Num)
{
uint8_t i;
uint8_t byte;
uint8_t crc=0xFF;
for(byte=0; byte<Num; byte++)
{
crc^=(message[byte]);
for(i=8;i>0;--i)
{
if(crc&0x80) crc=(crc<<1)^0x31;
else crc=(crc<<1);
}
}
return crc;
}
void AHT20_Read_CTdata(uint32_t *ct) //没有CRC校验,直接读取AHT20的温度和湿度数据
{
volatile uint8_t Byte_1th=0;
volatile uint8_t Byte_2th=0;
volatile uint8_t Byte_3th=0;
volatile uint8_t Byte_4th=0;
volatile uint8_t Byte_5th=0;
volatile uint8_t Byte_6th=0;
uint32_t RetuData = 0;
uint16_t cnt = 0;
AHT20_SendAC();//向AHT10发送AC命令
Delay_1ms(80);//延时80ms左右
cnt = 0;
while(((AHT20_Read_Status()&0x80)==0x80))//直到状态bit[7]为0,表示为空闲状态,若为1,表示忙状态
{
SensorDelay_us(1508);
if(cnt++>=100)
{
break;
}
}
I2C_Start();
AHT20_WR_Byte(0x71);
Receive_ACK();
Byte_1th = AHT20_RD_Byte();//状态字,查询到状态为0x98,表示为忙状态,bit[7]为1;状态为0x1C,或者0x0C,或者0x08表示为空闲状态,bit[7]为0
Send_ACK();
Byte_2th = AHT20_RD_Byte();//湿度
Send_ACK();
Byte_3th = AHT20_RD_Byte();//湿度
Send_ACK();
Byte_4th = AHT20_RD_Byte();//湿度/温度
Send_ACK();
Byte_5th = AHT20_RD_Byte();//温度
Send_ACK();
Byte_6th = AHT20_RD_Byte();//温度
Send_NOT_ACK();
Stop_I2C();
RetuData = (RetuData|Byte_2th)<<8;
RetuData = (RetuData|Byte_3th)<<8;
RetuData = (RetuData|Byte_4th);
RetuData =RetuData >>4;
ct[0] = RetuData;//湿度
RetuData = 0;
RetuData = (RetuData|Byte_4th)<<8;
RetuData = (RetuData|Byte_5th)<<8;
RetuData = (RetuData|Byte_6th);
RetuData = RetuData&0xfffff;
ct[1] =RetuData; //温度
}
void AHT20_Read_CTdata_crc(uint32_t *ct) //CRC校验后,读取AHT20的温度和湿度数据
{
volatile uint8_t Byte_1th=0;
volatile uint8_t Byte_2th=0;
volatile uint8_t Byte_3th=0;
volatile uint8_t Byte_4th=0;
volatile uint8_t Byte_5th=0;
volatile uint8_t Byte_6th=0;
volatile uint8_t Byte_7th=0;
uint32_t RetuData = 0;
uint16_t cnt = 0;
// uint8_t CRCDATA=0;
uint8_t CTDATA[6]={0};//用于CRC传递数组
AHT20_SendAC();//向AHT10发送AC命令
Delay_1ms(80);//延时80ms左右
cnt = 0;
while(((AHT20_Read_Status()&0x80)==0x80))//直到状态bit[7]为0,表示为空闲状态,若为1,表示忙状态
{
SensorDelay_us(1508);
if(cnt++>=100)
{
break;
}
}
I2C_Start();
AHT20_WR_Byte(0x71);
Receive_ACK();
CTDATA[0]=Byte_1th = AHT20_RD_Byte();//状态字,查询到状态为0x98,表示为忙状态,bit[7]为1;状态为0x1C,或者0x0C,或者0x08表示为空闲状态,bit[7]为0
Send_ACK();
CTDATA[1]=Byte_2th = AHT20_RD_Byte();//湿度
Send_ACK();
CTDATA[2]=Byte_3th = AHT20_RD_Byte();//湿度
Send_ACK();
CTDATA[3]=Byte_4th = AHT20_RD_Byte();//湿度/温度
Send_ACK();
CTDATA[4]=Byte_5th = AHT20_RD_Byte();//温度
Send_ACK();
CTDATA[5]=Byte_6th = AHT20_RD_Byte();//温度
Send_ACK();
Byte_7th = AHT20_RD_Byte();//CRC数据
Send_NOT_ACK(); //注意: 最后是发送NAK
Stop_I2C();
if(Calc_CRC8(CTDATA,6)==Byte_7th)
{
RetuData = (RetuData|Byte_2th)<<8;
RetuData = (RetuData|Byte_3th)<<8;
RetuData = (RetuData|Byte_4th);
RetuData =RetuData >>4;
ct[0] = RetuData;//湿度
RetuData = 0;
RetuData = (RetuData|Byte_4th)<<8;
RetuData = (RetuData|Byte_5th)<<8;
RetuData = (RetuData|Byte_6th);
RetuData = RetuData&0xfffff;
ct[1] =RetuData; //温度
}
else
{
ct[0]=0x00;
ct[1]=0x00;//校验错误返回值,客户可以根据自己需要更改
}//CRC数据
}
void AHT20_Init(void) //初始化AHT20
{
Init_I2C_Sensor_Port();
I2C_Start();
AHT20_WR_Byte(0x70);
Receive_ACK();
AHT20_WR_Byte(0xa8);//0xA8进入NOR工作模式
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
Delay_1ms(10);//延时10ms左右
I2C_Start();
AHT20_WR_Byte(0x70);
Receive_ACK();
AHT20_WR_Byte(0xbe);//0xBE初始化命令,AHT20的初始化命令是0xBE, AHT10的初始化命令是0xE1
Receive_ACK();
AHT20_WR_Byte(0x08);//相关寄存器bit[3]置1,为校准输出
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
Delay_1ms(10);//延时10ms左右
}
void JH_Reset_REG(uint8_t addr)
{
uint8_t Byte_first,Byte_second,Byte_third;
I2C_Start();
AHT20_WR_Byte(0x70);//原来是0x70
Receive_ACK();
AHT20_WR_Byte(addr);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
AHT20_WR_Byte(0x00);
Receive_ACK();
Stop_I2C();
Delay_1ms(5);//延时5ms左右
I2C_Start();
AHT20_WR_Byte(0x71);//
Receive_ACK();
Byte_first = AHT20_RD_Byte();
Send_ACK();
Byte_second = AHT20_RD_Byte();
Send_ACK();
Byte_third = AHT20_RD_Byte();
Send_NOT_ACK();
Stop_I2C();
Delay_1ms(10);//延时10ms左右
I2C_Start();
AHT20_WR_Byte(0x70);///
Receive_ACK();
AHT20_WR_Byte(0xB0|addr);寄存器命令
Receive_ACK();
AHT20_WR_Byte(Byte_second);
Receive_ACK();
AHT20_WR_Byte(Byte_third);
Receive_ACK();
Stop_I2C();
Byte_second=0x00;
Byte_third =0x00;
}
void AHT20_Start_Init(void)
{
JH_Reset_REG(0x1b);
JH_Reset_REG(0x1c);
JH_Reset_REG(0x1e);
}
- 将main.c文件里main函数包括上面的头文件等信息删除,换成下面代码
#include "main.h"
#include "dma.h"
#include "i2c.h"
#include "usart.h"
#include "gpio.h"
#include "AHT20-21_DEMO_V1_3.h"
#include <stdio.h>
#include <string.h>
int fputc(int ch,FILE *f)//重新printf
{
HAL_UART_Transmit(&huart1,(uint8_t *)&ch,1,0xFFFF);
while(__HAL_UART_GET_FLAG(&huart1,UART_FLAG_TC)!=SET){
}
return ch;
}
void SystemClock_Config(void);
volatile int c1,t1;
uint32_t CT_data[2]={0,0};
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_USART1_UART_Init();
MX_DMA_Init();
MX_I2C1_Init();
AHT20_Init();//放在其它之后
if((AHT20_Read_Status()&0x18)!=0x18)
{
AHT20_Start_Init(); //重新初始化寄存器
Delay_1ms(10);
}
while (1)
{
AHT20_Read_CTdata(CT_data); //不经过CRC校验,直接读取AHT20的温度和湿度数据 推荐每隔大于1S读一次
//AHT20_Read_CTdata_crc(CT_data); //crc校验后,读取AHT20的温度和湿度数据
c1 = CT_data[0]*100*10/1024/1024; //计算得到湿度值c1(放大了10倍)
t1 = CT_data[1]*200*10/1024/1024-500;//计算得到温度值t1(放大了10倍)
printf("湿度:%d%s",c1/10,"%");
printf("温度:%d%s",t1/10,"℃");
printf("\r\n");
HAL_Delay(3000);
}
}
编译烧录均无问题
三、效果
20221116_233110
四、总结
学习了IIC协议,清楚协议大致流程。第一次使用传感器进行实验,感觉很酷。也是第一次调用厂商的代码,并且通过STM32Cube进行配置相当方便,这样应该是以后工作的常态吧(使用厂商的代码)。
五、参考资料
https://blog.csdn.net/qq_43279579/article/details/111597278
https://blog.csdn.net/Mouer__/article/details/121514102

![[附源码]Python计算机毕业设计bugbase管理系统](https://img-blog.csdnimg.cn/28c2e62ecf58470d83180aee53d3b8ed.png)


![[附源码]java毕业设计篮球俱乐部管理系统](https://img-blog.csdnimg.cn/c7ba9786349743e9a8038e5fab5f888c.png)