文章目录
- 0. 数据说明
- 1. 凹凸缺陷基本内容
- 2. 详细检测思路
- 结果:

0. 数据说明
 如上图所示,需要检测的内容为红色框内标出的缺陷部分。简单示例如下红色线条。
如上图所示,需要检测的内容为红色框内标出的缺陷部分。简单示例如下红色线条。
 但是,由于噪声的影响,点云的平面度并不好,且横梁边缘处存在连接,如下:
但是,由于噪声的影响,点云的平面度并不好,且横梁边缘处存在连接,如下:
 基于上述问题,首先需要获取有效点云(最上层横梁点云),之后在进行凹凸缺陷检测。
基于上述问题,首先需要获取有效点云(最上层横梁点云),之后在进行凹凸缺陷检测。
1. 凹凸缺陷基本内容
进行3D点云凹凸缺陷检测在许多应用中具有重要的意义,以下是一些常见的原因:
-
质量控制与质检: 在制造业中,通过检测产品表面的凹凸缺陷,可以及时发现和修复制造过程中的问题,确保产品质量符合标准。
-
安全性: 在工程和建筑领域,检测结构表面的凹凸缺陷有助于确保建筑物、桥梁等结构的结构完整性和安全性。早期发现可能的问题可以防止事故发生。
-
医学图像处理: 在医学影像学中,通过3D点云凹凸缺陷检测,可以帮助医生识别和分析患者骨骼或器官表面的异常,从而提供更精确的诊断。
-
地质勘探: 在地质勘探领域,通过对地表进行3D点云凹凸缺陷检测,可以发现地下脉络、河流或者地表的裂缝,为资源勘探提供重要信息。
-
机器人导航: 对环境进行3D点云凹凸缺陷检测可以帮助机器人和自动驾驶系统避免碰撞,确保在复杂的环境中安全导航。
-
文物保护: 在文物保护和修复中,通过对文物表面进行凹凸缺陷检测,可以制定合适的修复方案,保护文化遗产。
-
虚拟现实和增强现实: 在虚拟现实和增强现实应用中,通过对真实世界进行3D点云凹凸缺陷检测,可以更准确地将虚拟元素叠加到真实环境中,提高用户体验。
总体而言,3D点云凹凸缺陷检测有助于从复杂的三维环境中提取重要的信息,为各种应用提供基础数据和分析结果。这些应用涵盖了多个领域,包括制造业、医疗、建筑、地质勘探等。
2. 详细检测思路

-
提取3D ROI内点:提取有效点,加速后续处理速度;
-
点云法向量:
- 一方面用于后续处理中的“点过滤”,过滤点与相机z轴夹角过大的点;
-
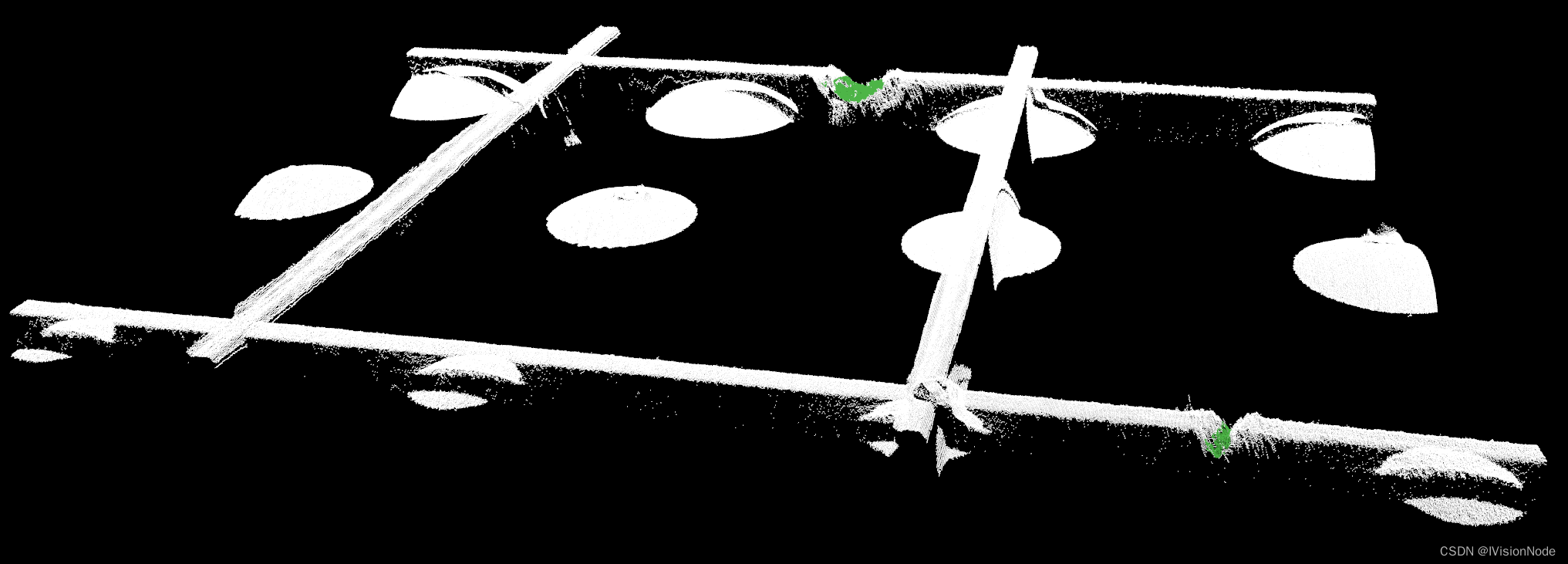
点过滤:主要是去除掉噪声,可采样的方法:统计滤波+法向量过滤结合的方法;
- 白色为过滤的点,红色为保留的点。可以看到有效检测点都被保留了下来; -
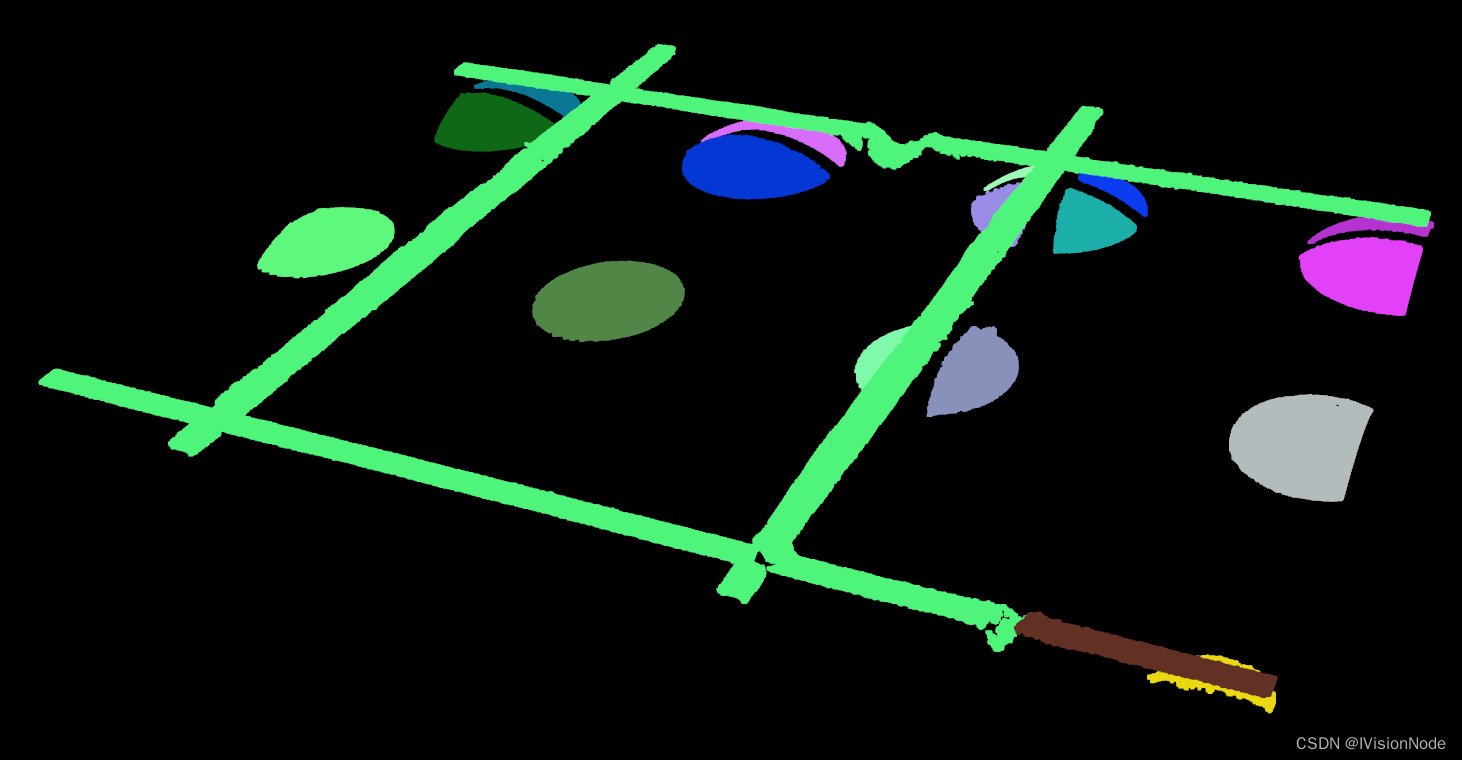
 - 点云聚类:获取有效点,剔除不必要的点;
- 点云聚类:获取有效点,剔除不必要的点; - 聚类后保留下的点更为干净。
- 白色为过滤的点,红色为保留的点。可以看到有效检测点都被保留了下来; -
-
点位位姿+根据位姿提取最高层点:获取最上层的目标点;
- 最高层有效检测点云。
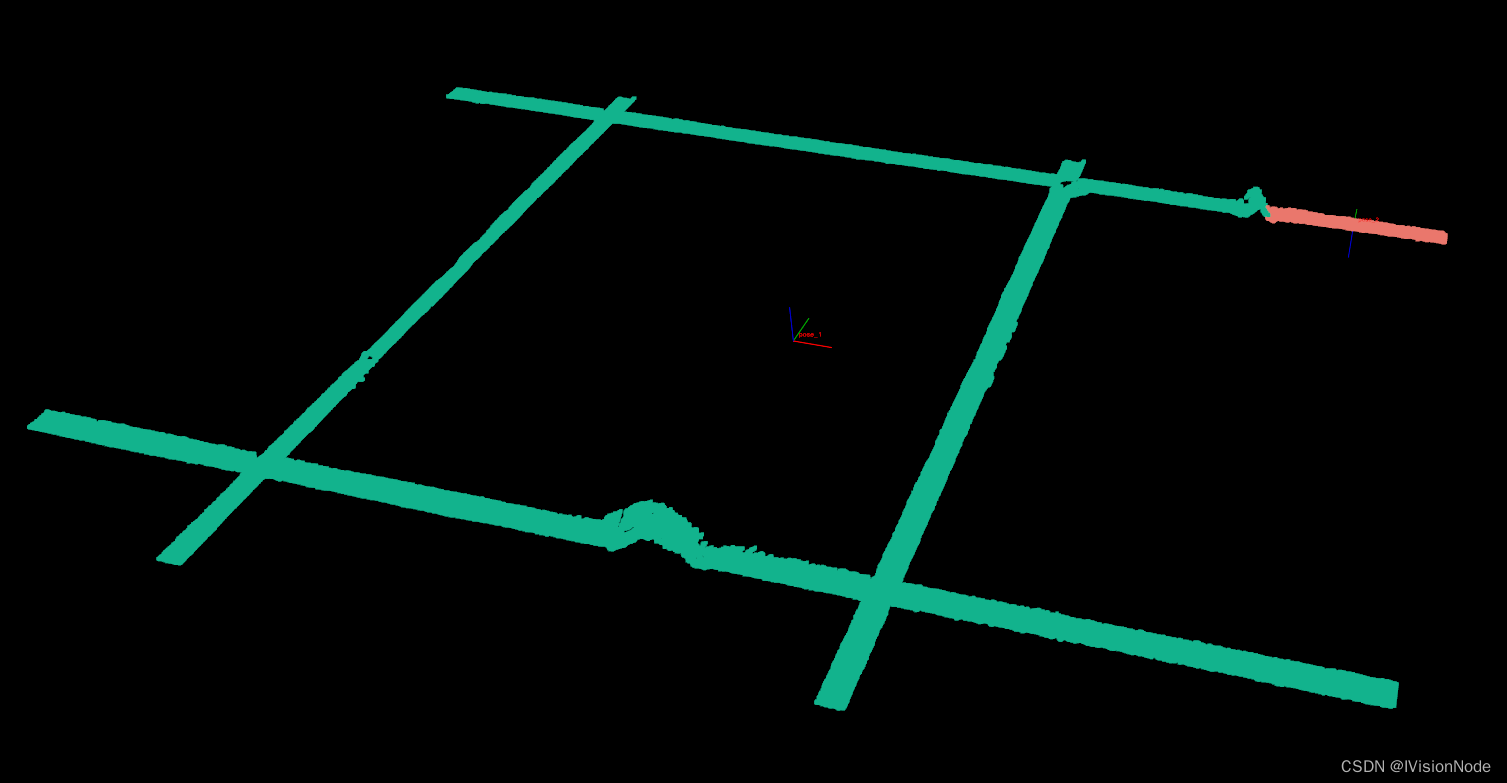
- 最高层有效检测点云。
-
凹凸缺陷:根据点到平面的距离,提取凹凸缺陷;
免责声明:
文章中引用的图片如有侵权,请联系作者删除。