文章目录
- 0.基础知识
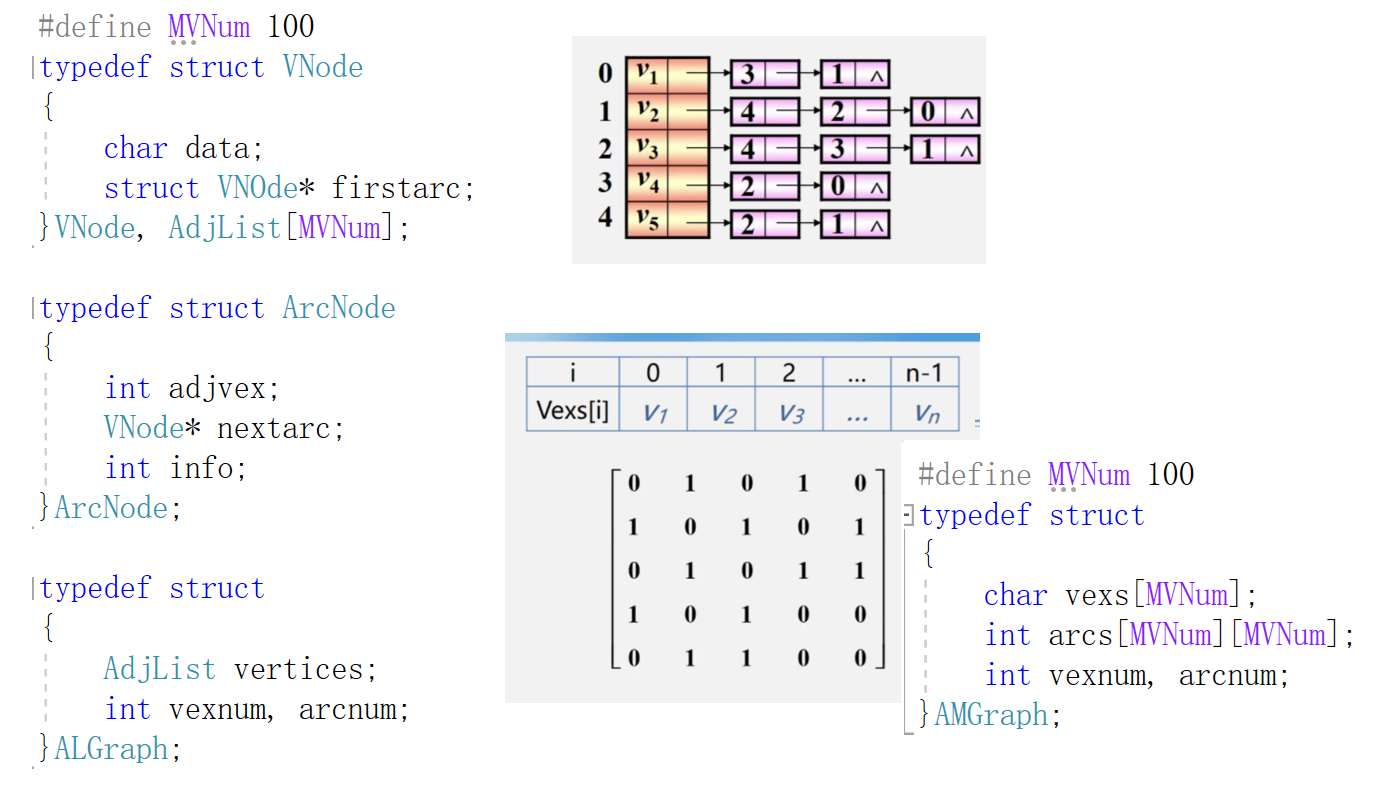
- 0.1图的存储结构
- 0.2算法复杂度
- 1.BFS和DFS
- 2.Prim和Kruskal
- 1.最小生成树
- 1.1Prim算法
- 1.算法思想
- 2.Prim代码实现
- 1.2Kruskal算法
- 1.算法思想
- 2.Kruskal代码实现[demo]
- 2.最短路径
- 2.1问题抽象:
- 2.2两种常见的最短路径问题:
- 1.Dijkstra: 单源最短路径O(N^2)
- 2.Floyd: 所有顶点间的最短路径
- 法一:Dijkstra执行n次O(N^3)
- 法二:Floyd (弗洛伊德)算法O(N^3)
0.基础知识
0.1图的存储结构
0.2算法复杂度
1.BFS和DFS
邻接矩阵表示: 时间复杂度 = O(N^2)
邻接矩阵表示: 时间复杂度 = O(N+E)
空间复杂度均为O(N)
稠密图适于在邻接矩阵上进行深度遍历
稀疏图适于在邻接表_上进行深度遍历
2.Prim和Kruskal
Prim: O(N^2) 稠密图
Kruskal: O(eloge)[边数] 稀疏图
Minimum Spanning Tree: MST
1.最小生成树
1.1Prim算法
1.算法思想
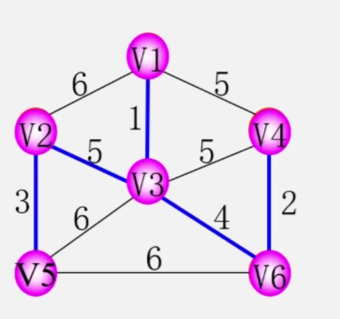
- 所有的顶点被分为两类 被加入到MST的A类 未被加入到MST的B类
- 从B类中任选一个顶点V 放入A类 从能跟A类连接且不在MST的这些边中选出一条权值最小的边作为MST的构成部分
- V所连的那个顶点入MST 依次2 3直到所有顶点入MST
2.Prim代码实现

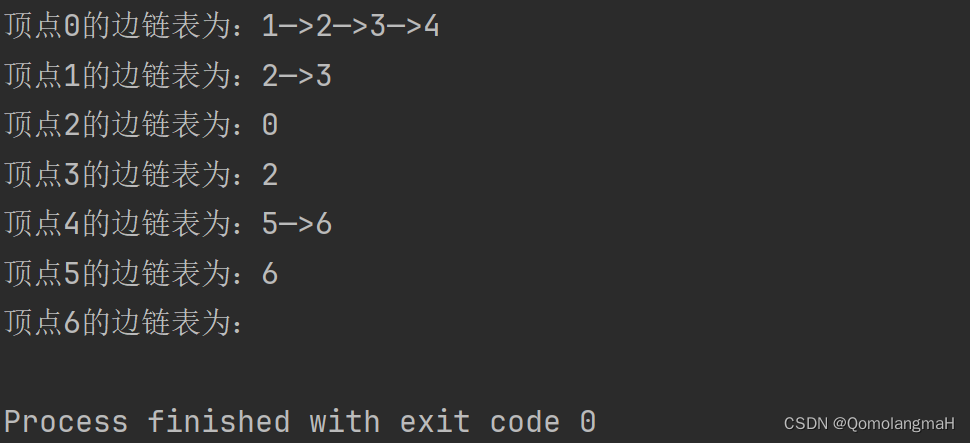
- 搞一个结构体数组 下标i表示每个顶点的编号 左域存顶点Vx 表示Vi到Vx 右域存距离 表示Vi到Vx的距离
- 从起始点u作为A类的第一个顶点开始 从矩阵中取出B类所有顶点到A类新增顶点(此时是u) 的距离放入对应右域 左域放B类新增顶点 此时结构体数组表示B类所有顶点到A类新增顶点的距离
- 在当前结构体数组中取出右域值最小的下标index 表示编号为index的顶点到A类顶点距离最短 Vindex将作为下一个加入A类的顶点 此时第一条路径已求出 输出
- Vindex顶点在结构体数组的右域值设0 表示已入A类[0: 已入A类正无穷: 不存在边 其他值: 距离长度]
- 遍历矩阵编号为index的那一行 取出每个顶点到Vindex的距离 与 每个顶点到旧A类顶点距离比较 如果因为Vindex的新加入使得B类顶点到A类顶点出现较小值 则替换 比如:Vj到Vindex距离比Vj到旧顶点距离小 Vj在结构体数组中的左域放Vindex 对应距离也替换
- 继续345
#include <iostream>
#define MVNum 10
#define MaxInt 32767
using namespace std;
struct edge
{
char adjvex;
int lowcost;
}closedge[MVNum];
typedef struct
{
char vexs[MVNum];
int arcs[MVNum][MVNum];
int vexnum, arcnum;
}AMGraph;
int LocateVex(AMGraph G, char v)
{
for (int i = 0; i < G.vexnum; i++)
{
if (G.vexs[i] == v)
return i;
}
return -1;
}
int CreateUDN(AMGraph& G)
{
cin >> G.vexnum >> G.arcnum;
for (int i = 0; i < G.vexnum; i++)
cin >> G.vexs[i];
for (int i = 0; i < G.vexnum; i++)
{
for (int j = 0; j < G.vexnum; j++)
G.arcs[i][j] = MaxInt;
}
for (int k = 0; k < G.arcnum; k++)
{
char v1, v2;
int w;
cin >> v1 >> v2 >> w;
int i = LocateVex(G, v1);
int j = LocateVex(G, v2);
if (i != -1 && j != -1)
G.arcs[i][j] = G.arcs[j][i] = w;
}
return 0;
}
int Min(AMGraph G)
{
int min = MaxInt;
int min_index;
for (int i = 0; i < G.vexnum; i++)
{
if (closedge[i].lowcost != 0 && closedge[i].lowcost < min)
{
min = closedge[i].lowcost;
min_index = i;
}
}
return min_index;
}
void Prim(AMGraph G, char u)
{
int index = LocateVex(G, u);
for (int i = 0; i < G.vexnum; i++)
{
if (i != index)
{
closedge[i].adjvex = u;
closedge[i].lowcost = G.arcs[index][i];
}
}
//u到u距离为0
closedge[index].lowcost = 0;
for (int i = 1; i < G.vexnum; i++)
{
index = Min(G);
cout << closedge[index].adjvex << "->" << G.vexs[index] << endl;
closedge[index].lowcost = 0;
for (int j = 0; j < G.vexnum; j++)
{
if (G.arcs[index][j] < closedge[j].lowcost)
{
closedge[j].adjvex = G.vexs[index];
closedge[j].lowcost = G.arcs[index][j];
}
}
}
}
int main()
{
AMGraph G;
CreateUDN(G);
char u;
cin >> u;
Prim(G, u);
return 0;
}
1.2Kruskal算法
1.算法思想
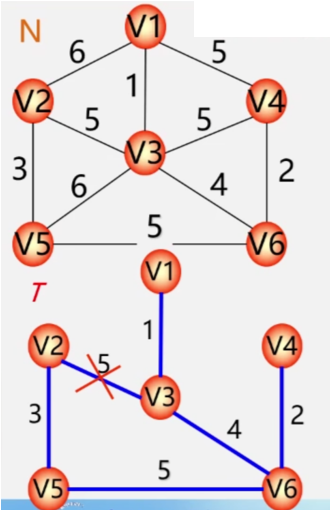
假设只有顶点没有边 从所有的边中取一条权值最小且不会形成环的边 直至构成一棵最小生成树
2.Kruskal代码实现[demo]
2.最短路径
2.1问题抽象:
在有向网中A点(源点)到达B点(终点)的多条路径中,寻找一条各边权值之和最小的路径,即最短路径。
最短路径与最小生成树不同,路径上不一定包含n个顶点,也不一定包含n- 1条边。
2.2两种常见的最短路径问题:
单源最短路径: Dijkstra (迪杰斯特拉) 算法
所有顶点间的最短路径: Floyd (弗洛伊德)算法
1.Dijkstra: 单源最短路径O(N^2)
可以求出V0到V1~V6的分别的最短路径
按路径长度递增次序产生最短路径
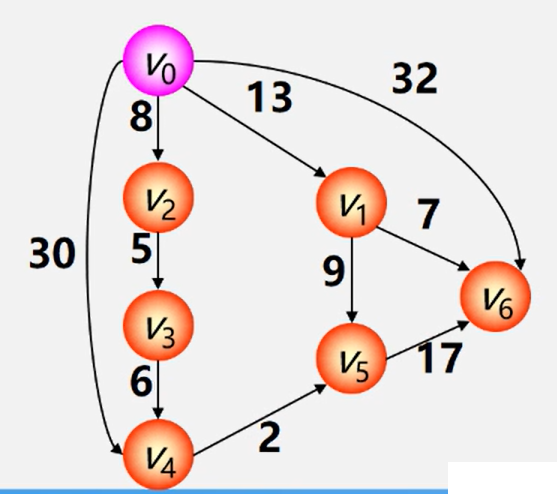
- 将所有的顶点分为已在path的A类 和 不在path的B类 从B类中任选一个V作为初始点 V归入A类
- 对V分别访问B类所有顶点 能直达的将距离计入数组D(下标i代表顶点编号 值代表V到D[i]的路径) 无法直达的将无穷大计入数组D
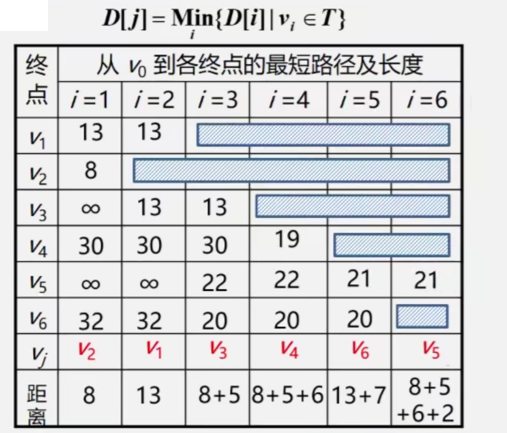
- 对这次遍历的结果取最小值D[x]作为V到Vx的最短路径并存入数组 作为结果:第一次遍历确定了V到Vx的最短路径且值为D[x] 并将Vx归入A类 此后不再考虑Vx 因为他已进path
- 对V分别访问B类所有顶点 如果通过Vx能到达且距离比第一次遍历结果小 将新/小距离替换旧/大距离
- 对这次遍历的结果取最小值D[y]作为V到Vy的最短路径并存入数组 作为结果:第二次遍历确定了V到Vy的最短路径且值为D[y] 并将Vy归入A类 此后不再考虑Vy 因为他已进path
- 依次执行2345
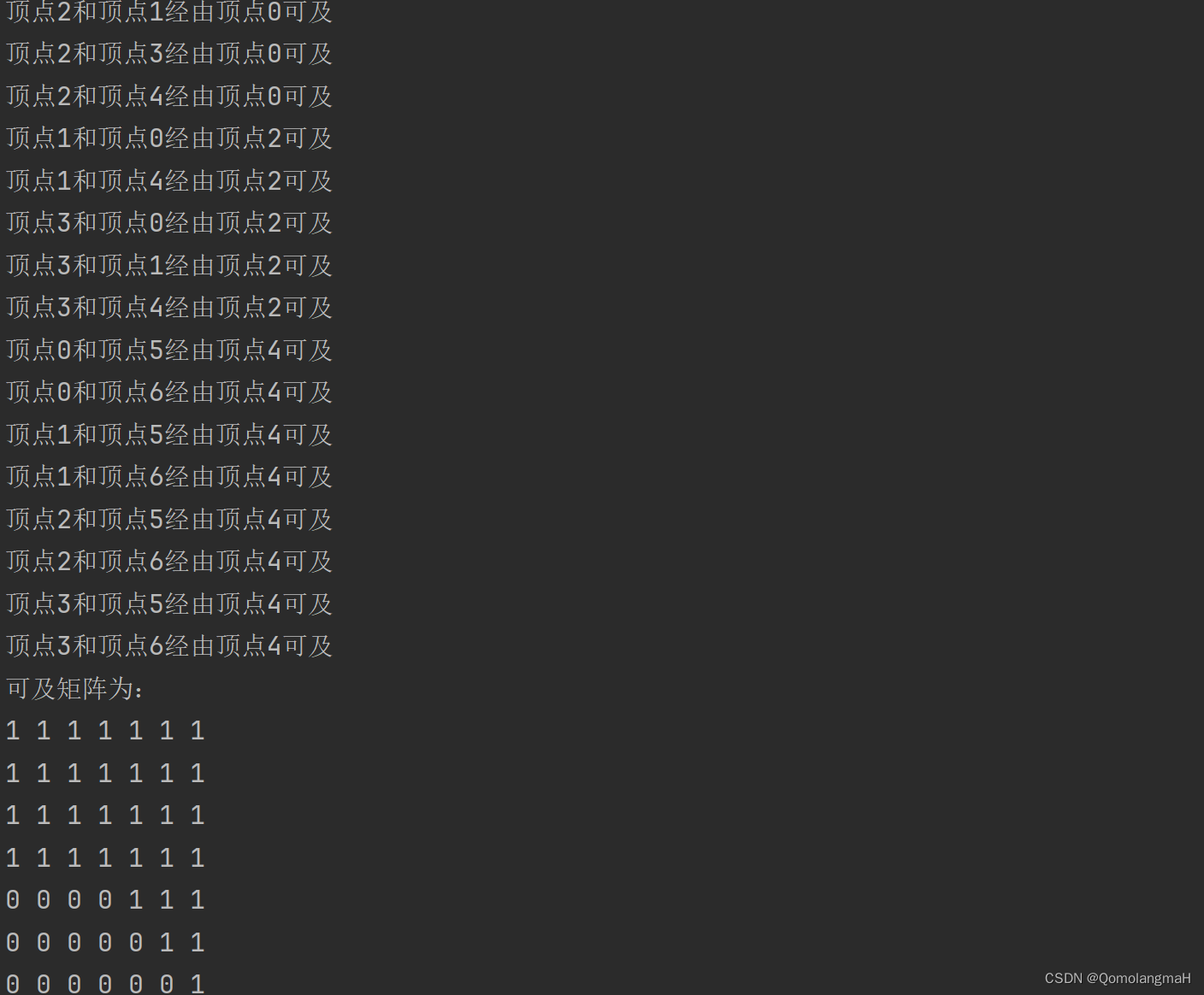
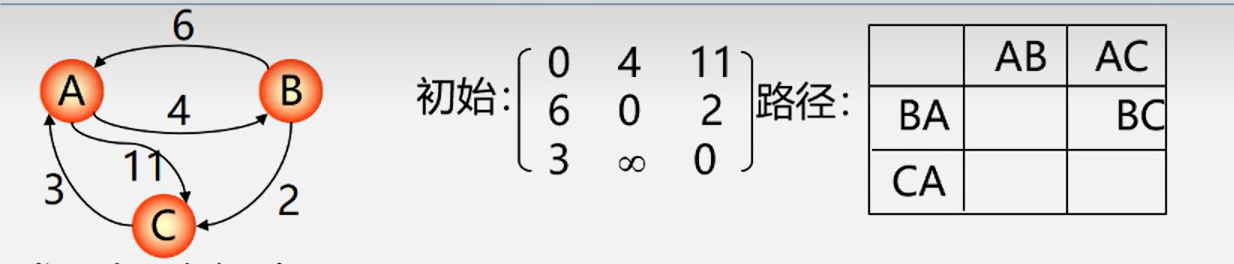
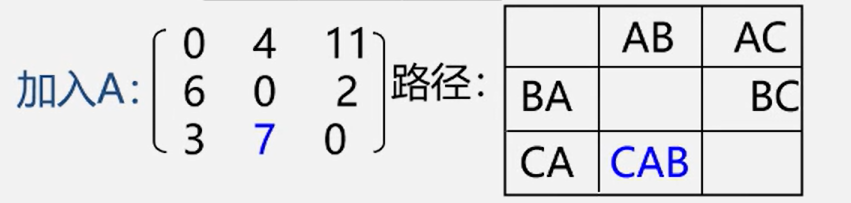
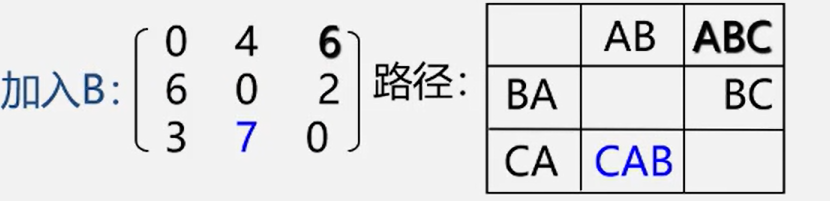
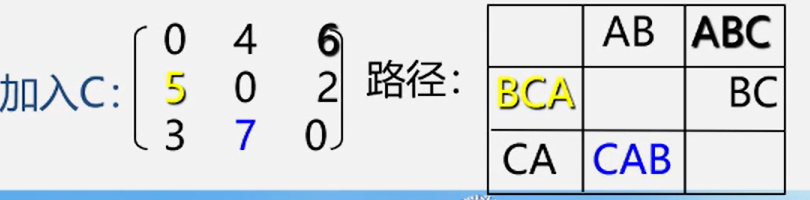
2.Floyd: 所有顶点间的最短路径
法一:Dijkstra执行n次O(N^3)
法二:Floyd (弗洛伊德)算法O(N^3)






![⑥【bitmap 】Redis数据类型: bitmap [使用手册]](https://img-blog.csdnimg.cn/20a7f1b58dfb4660b75d7f021c157d57.png#pic_center)