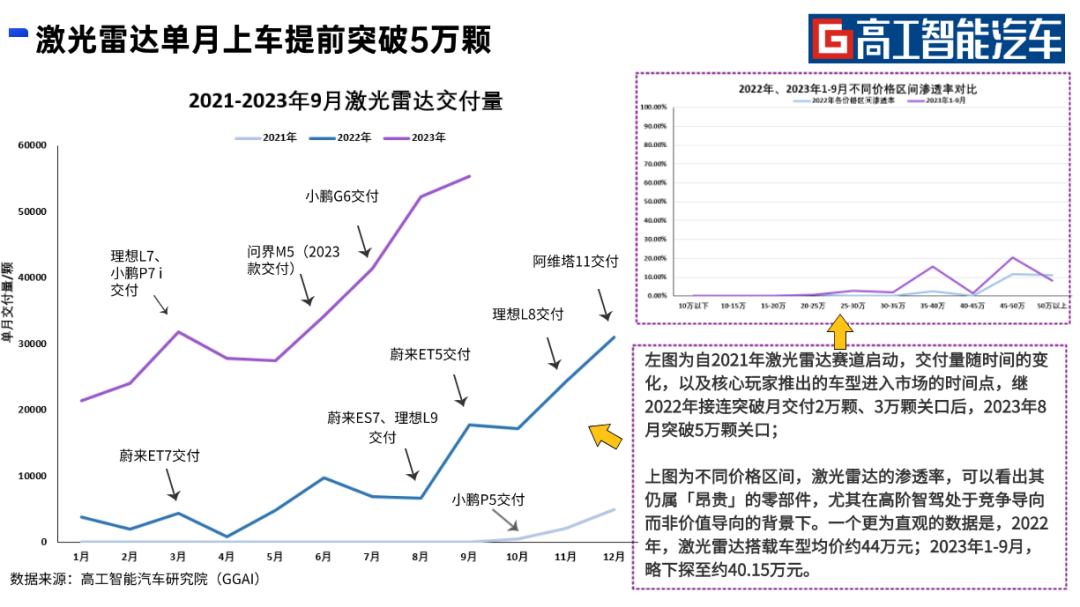
高工智能汽车研究院监测数据显示,截至2023年9月,激光雷达已经连续2个月交付破5万台关口。
这也意味着,这一交付关口早于预期被突破。回溯来看,2023年6月,高工智能汽车研究院在第十四届智驾开发者大会上释放预测,2023年四季度到2024年上半年,激光雷达单月交付将突破5万台关口。
事实上,继2022年激光雷达迎量产元年后,2023年NOA等高阶智驾领域进入性价比厮杀周期,技术驱动转入真正的市场驱动,激光雷达的价格与价值遭遇市场“拷问”,激光雷达这一赛道还“行不行”?成为贯穿2023年智驾产业的焦点。
对此,对于现阶段激光雷达赛道的演进情况,结合诸多对产业内从业者的调研,此次文章尝试回答以下核心问题:
●谁在真正配置激光雷达?谁在做噱头?
●激光雷达对城市NOA是必须吗?
●为何激光雷达在2023年被质疑?
●为何说L3必须要用激光雷达?
●激光雷达何时迎规模放量的“拐点”?
●当前阶段市场有哪些代表玩家?有哪些代表产品?
逐一来看,其一,谁在真正配置激光雷达?谁在做噱头?
事实上,2023年1-9月,激光雷达主要在蔚来、小鹏、理想、华为(阿维塔、问界)车型上放量;
埃安、极狐、哪吒、高合、路特斯、奥迪等已推出相关车型,但放量处于低位,这些或采用顶配/选配策略,或本身为豪车品牌销量较为有限;
部分调研对象认为,进入2023年,激光雷达上车需求正“去伪存真”(厂商是否真正落地城市NOA),诸多早期高喊高阶智驾的车企,或主动或被动被“挤泡沫”,尤其在2023年上半年产业内舆论风向出现「实现L3需要10年」「自动驾驶是扯淡」,发酵中不断加剧悲观情绪。


那么,其二,激光雷达对城市NOA是必须吗?
根据调研获取的信息,在尝鲜阶段不考虑“好用度”(打磨MPI,以致逐步达到消费者满意的程度),激光雷达可能不是必须,但考虑下一阶段打磨MPI的需求,以及当前国内视觉技术演进阶段,激光雷达不可或缺。目前,①特斯拉、大疆、极越推纯视觉方案(大疆、极越方案仍待市场验证);②蔚小理华等其他玩家,基本均为激光雷达方案。
两者区别在于,纯视觉的工作原理是运用可见光,对于强光、弱光、无光、光线快速变化的场景,存在天然的物理学局限性,特斯拉等截至目前,也未能证明可以突破这些物理学局限。在可见光失效的物理场景,需要激光雷达/4D毫米波雷达(点云相较稀疏,处产业化前期)等作为感知探测补充。(另一目前核心作用为提供真值,该问题尾部详述)
较多调研对象认为,两种路线瞄准的市场不同,有的瞄准解决85%的场景,有的瞄准99.99%,绝大多数调研对象认为,要真正达到L3,就必须用激光雷达作为感知补充。
一个容易被忽视的问题是,汽车产品对于行驶安全的敏感度非常高:这或许类似手机存在起火/爆炸风险一样,消费者对智能手机死机的容忍度高,但对其起火/爆炸的容忍度非常低。
在车端,如果加装3000-1W元可以弥补可见光缺陷,消费者要不要装。一个或许可以类比的是,安全气囊(目前一套价格2000-1W不等)的崛起。
从结果上看,截至2023年11月国内主机厂落地的城市NOA车型,基本采用激光雷达路线,并处于努力使用激光雷达的阶段。
(另,以特斯拉为代表的纯视觉路线此前取得进展,用transformer+bev优化传统感知对道路理解的不足(bev视角下深度信息更好量化)的问题,用占用网络的类似“体素”解决不识别就不作为障碍物的问题,对应技术2023年在国内不断走热。
有曾任职车企的头部Tier1管理层认为,如果有无限的、准确的结构化数据(当前激光雷达的核心作用之一,便是获取真值数据,单目视觉测距某种程度上靠“猜”),通过训练可以解决的问题是,在正常光线场景下,只用视觉就能“看清、看明白”所有的障碍物,并无限接近激光雷达的精度。在数据量有限的情况下,如果又想要得到一个效果较好的智驾系统,加入激光雷达放是一个又好又快、显性度高的补充。(非正常光线场景,仍需其它传感器补充)
其三,为何激光雷达在2023年被质疑?
根据调研获取的信息,①受部分激光雷达定点未有效落地放量的影响:拉长时间线,2021年前后,国内头部传统车企纷纷成立高端新能源品牌,智能化为新车营销的核心切入口之一,城市NOA落地难度尚未显现,大量车企释放乐观的L3乃至L4落地时间表,激光雷达为高阶智驾的代表性配置;
进入2023年,诸多车企的高阶智驾能力并不完备,“全栈自研”也逐渐往“全栈可控”的风向扭转,较多调研对象在沟通中认为,市场正在分层:1)蔚小理华等智驾能力头部的厂商,均未砍掉激光雷达雷达,而是沿激光雷达路线奋力落地城市NOA,尝试把激光雷达用起来、用好;2)一些智驾能力尚未准备好的车企,选择砍掉/顶配/选配激光雷达(即便上车也很难用起来、用好),推迟高阶智驾落地。
②2021-2023年H1上车的激光雷达,尚未被很好地使用,其上车价值被质疑(L0-L2阶段,业内普遍采用摄像头、毫米波搭建了一套智驾感知系统,进入城市NOA阶段,激光雷达上车要解决的关键问题之一是,怎么把其更好地融入现有的感知系统);
③现在高阶智驾仍处于ODD扩展阶段(高速到城区、简单场景到复杂场景,MPI并非不重要,只是现阶段产业的关注点还在ODD扩展,先解决从无到有点问题,而非从有到好),视觉路线方便做极致性价比,拉低价格门槛让一部分消费者尝鲜,做商业化闭环。
进一步来看,其四,为何L3必须要用激光雷达?
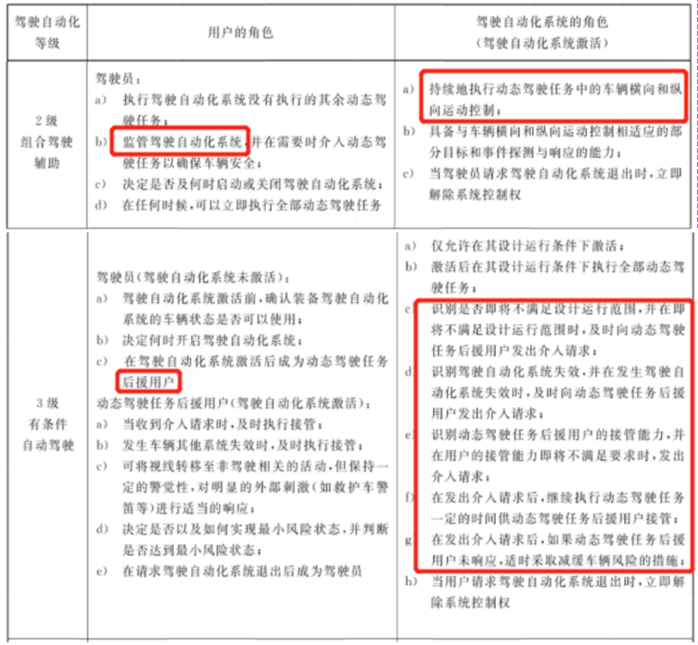
①根据国家市场监督管理总局、中国国家标准化管理委员会发布的《汽车驾驶自动化分级》(2022年3月实施),2级组合驾驶辅助系统(某种程度上与SAE的L2对应),用户需“监管驾驶自动化系统,并在需要时介入动态驾驶任务以确保车辆安全”;
3级有条件自动驾驶(某种程度上与SAE的L3对应)中,驾驶员在自动化系统激活后为“后援用户”,并无时刻监管的义务。
根据调研中获取的信息,一旦过渡到L3,车厂开始承担责任,ODD边界内驾驶员不再时刻作为智驾系统的备份,智驾系统需另置入一套冗余系统规避风险(考虑系统成本拉高,车厂开始担责(风险在短期内对车厂是否可承受)等问题,部分玩家认为跨越L3需要较长时间);
②对于非正常光线场景,需要激光雷达提供高质量的感知补充信息。如,有调研对象在沟通中表示,“后续视觉识别会越来越准确,激光雷达会越来越便宜,我依然认为,接下来的传感器融合会有激光雷达,真正的L3、L4需要激光雷达”;
③探索立法层面,以深圳2022年8月开始实施的《深圳经济特区智能网联汽车管理条例》为例,责任划分方面,有驾驶人的(L3、L4均配备驾驶人),由驾驶人承担违法和赔偿责任,因智能网联汽车存在缺陷造成损害的,车辆驾驶人或者所有人、管理人依照上述规定赔偿后,可以依法向生产者、销售者请求赔偿。
那么,其五,激光雷达何时迎规模放量的“拐点”?
根据调研中的沟通情况,制约激光雷达进一步放量的因素:其一,尚未给终端带来足够的价值感受;其二,成本仍然较高;其三,终端消费不振、油电同价、特斯拉引领对应车型降价潮等,推动当下市场对于性价比进一步强调,而高阶智驾目前被认为缺乏性价比;
何时能用起来?城市NOA何时能破局,达到更高性价比?较多调研对象认为,2025年或是拐点,2023年主机厂处在极力将激光雷达用起来的阶段(2021-2022年时部分厂商配置的激光雷达甚至并未使用),有调研对象进一步判断,奋力推动城市NOA落地的情况下,到年底各家配置激光雷达的车型基本都能将其使用起来,但是否能用好,需要实际验证;
另有调研对象指出,要用好激光雷达,存在一个“因果关系”:首先需要一定量的激光雷达车型“跑起来”,产生一定量的数据反馈,推动激光雷达融入现有摄像头、毫米波雷达感知系统并不断优化,形成数据闭环在2024年做3-4次OTA迭代,才能把激光雷达做到好用,10万辆搭载激光雷达的车型或许是一个基础的门槛;
即,城市NOA在不断被蔚小理华等推进的情况下,终端认可程度到2025年或到达一定临界点,从而带动激光雷达进一步规模放量。另,激光雷达厂商经过进一步技术降本、性能升级,产业链进一步整合成熟,激光雷达也越发便宜。
回到赛道玩家层面,其六,激光雷达赛道主要分为哪些玩家?有哪些代表产品?
高工智能汽车注意到,激光雷达赛道的玩家某种程度上可划分为:
★国内初创型激光雷达企业;
★传统汽车产业链玩家;
★国内跨界布局玩家;
★国际传统Tier1;
★国际初创型激光雷达企业;
其中,举例来看:
●禾赛科技方面,其产品线包括AT128、FT120、ET25等。
具体来看,其2022年7月量产交付AT128(2021年8月推出),走一维转镜的半固态路线,这也是禾赛科技当下的量产主力产品。2022年11月,其发布flash全固态路线的补盲雷达FT120。
2023年4月,禾赛科技发布ET25,率先尝试激光雷达“入舱”,且实现10%反射率下250米测距能力(250米,事实上是905nm与1550nm激光雷达路线之争中的一个关键数字)。商业化落地进程上,2023年下半年,禾赛科技继续获得一汽红旗、哪吒汽车、零跑汽车、长城汽车等车企的相关合作。
根据最新释放的信息,截至2023年11月,禾赛已与14 家主流 OEM 和Tier 1 客户建立了前装量产合作,累计获得 50 余款车型的激光雷达量产定点。值得注意的是,2023年2月,禾赛科技登陆美股,成为国内激光雷达企业上市第一股。
●速腾聚创方面,其产品线包括M1、E1等。
具体来看,速腾聚创2021年6月交付M1,走mems半固态路线,在2021年中至年底主机厂掀起的激光雷达“军备竞赛”中,速腾聚创表现最为亮眼,斩获的车型定点最多。及至2022年11月,其发布flash全固态路线的补盲雷达E1。
商业化进展方面,根据对外释放的信息,截至2023年10月底,RoboSense速腾聚创拥有前装量产定点车型数量由截至2023年6月底的58款增至61款。同期,RoboSense速腾聚创已先后助力11家整车厂及Tier1客户实现19款车型规模量产落地。
尤其是,伴随智驾一线阵营的小鹏G6、G9以及问界车型的规模放量,迅速拉升速腾聚创的交付规模。2023年6月,智己LS6(将激光雷达、Orin标配价格拉至20-25万区间,与小鹏G6同属典型产品)的交付,同样是潜在的增量来源。
●图达通方面,其拥有两个产品平台:猎鹰平台、云雀平台。
具体来看根据介绍,灵雀平台为905nm平台,采取高度模块化设计,支撑多款产品同步研发,共用光电技术;猎鹰平台则为1550nm路线,产品包括猎鹰灵动版、精英版、智能版,2022年图达通向蔚来规模化供货,即为猎鹰平台产品。
软件平台方面,为OmniVidi软件平台,包含感知中台和工具链两大组成部分。感知中台通过模型算法将激光雷达的原始数据输出为感知结果。工具链基于激光雷达数据可视化、数据标注、模型训练等工具,形成数据和算法的闭环,助力感知模型的快速迭代。
商业落地方面,根据最新释放的信息,图达通率先实现了高性能激光雷达的大规模量产上车,助力完成了9款车型交付,在国内外图达通还与多家商用卡车企业、Robotaxi企业以及智慧城市、智慧高速等应用领域客户有着广泛的合作。
另外,图达通目前产能已超过30万台每年,在实际需求推动下,新的产线也已在布局中,将于2023年12月份进入量产阶段,迎来进一步的产能跃升。
●北醒光子方面,其在乘用车领域现阶段力推AD2-s。
具体产品端来看,2022年12月,北醒率先发布512线产品AD2(作为对比,当下市场玩家的主流前视激光雷达仍停留在128线,即512线领先市场2代)。2023年4月,北醒进一步发布激光雷达平台,并推出基于该平台的256线产品AD2-S,“让更多车企提前享受512时代红利”。
一直以来,提高性能同时控制成本,是激光雷达赛道内的难题,其如何解决?据北醒介绍,其平台硬件架构采用2D高精扫描、阵列收发系统,最终达到的效果为:发射器数量仅需1D扫描的三十二分之一,接收器仅需八分之一。根据释放的信息,AD2、AD2-s均将于2023年量产交付。
软件方面,北醒将其软件控制系统与2D扫描搭配,实现软件定义激光雷达,在感知过程中可实现局部高清、视场角聚焦高清、全局高清等不同模式。另据介绍,市场上的激光雷达收发系统中,一般需7片镜片,北醒多年努力下完成4代技术迭代,最终将7个镜片减少至4个镜片,即相关成本、重量直接压缩3/7。
值得注意的是,北醒成立于2015年,与国内第一批造车新势力、激光雷达创业公司基本同期,截至目前已深耕8年。整体布局上,除在汽车领域的低调深耕,在工业传感领域,其各型号激光雷达产品累计出货量100万台,在2020年起具备盈利能力;在大交通领域,其产品应用于冬奥会专线地铁、三峡大坝等诸多项目,获细分领域的市占率第一。
●亮道智能方面,其首推Flash补盲产品,且其发展颇具代表性。
具体来看,2022年5月,亮道发布Flash纯固态补盲雷达LDSatellite®,开启短距补盲激光雷达新赛道。在亮道智能看来,激光雷达系统级全栈服务能力是其作为激光雷达系统供应商,有别于行业其他硬件提供商的核心优势之一。
据介绍,激光雷达是一个系统工程,不仅要有满足车规的硬件,也需要符合量产功能安全要求的软件,才能真正发挥其高精度感知作用。亮道智能开发推出的“面向量产的车载激光雷达系统”解决方案,具备了从开发到量产交付的软硬一体闭环能力,方案包含:车规级激光雷达硬件、AI感知功能开发,基于大数据的测试验证与量产后数据服务。
客户合作方面,已与长城汽车、长安汽车、上汽集团、大众集团、梅赛德斯-奔驰、宝马、Continental、Magna、CARIAD等汽车行业巨头建立合作,提供相关产品及服务。