参考B站古月居ROS入门21讲:
客户端Client的编程实现
服务端Server的编程实现
基于VMware Ubuntu 20.04 Noetic版本的环境
文章目录
- 一、小乌龟例程中的服务
- 二、创建功能包
- 三、创建Client代码
- 3.1 以C++为例
- 3.1.1 配置Client代码编译规则
- 3.1.2 编译整个工作空间
- 3.1.3 配置环境变量
- 3.1.4 执行代码
- 3.2 以Python为例
- 3.2.1 配置Client代码编译规则
- 3.2.2 编译整个工作空间
- 3.2.3 配置环境变量
- 3.2.4 执行代码
- 四、创建Server代码
- 4.1 以C++为例
- 4.1.1 配置Server代码编译规则
- 4.1.2 编译整个工作空间
- 4.1.3 配置环境变量
- 4.1.4 执行代码
- 4.2 以Python为例
- 4.2.1 配置Server代码编译规则
- 4.2.2 编译整个工作空间
- 4.2.3 配置环境变量
- 4.2.4 执行代码
服务(Service)是节点之前同步通信的一种方式,允许客户端(Client)节点发布请求(Request),由服务端(Server)节点处理后反馈应答(Response)。
一、小乌龟例程中的服务
小乌龟例程提供了不少设置功能,这些设置都以服务的形式提供。在小乌龟例程运行状态下,使用如下命令查看系统中的服务列表:
rosservice list
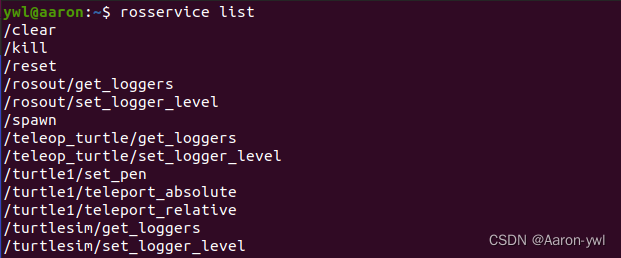
可以使用代码或终端对列表中的服务进行调用。例如使用以下命令调用"/spawn"服务新生一只小乌龟:
rosservice call /spawn "x: 1.0
y: 5.0
theta: 0.0
name: 'turtle2'"
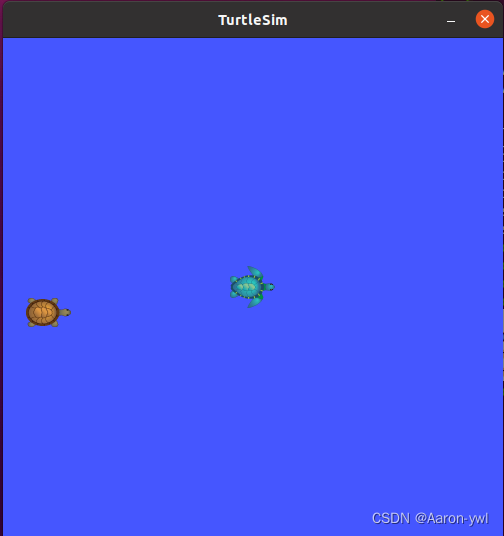
服务的请求数据是新生小乌龟的位置、姿态以及名称,调用成功后仿真器中就会诞生一只新的小乌龟。如图所示:
终端会打印服务反馈的应答数据,即新小乌龟的名称,如图所示:

从小乌龟仿真例程中的服务可以看到,服务一般分为服务端(Server)和客户端(Client)两个部分,Client负责发布请求数据,等待Server处理;Server负责处理相应的功能,并且返回应答数据。
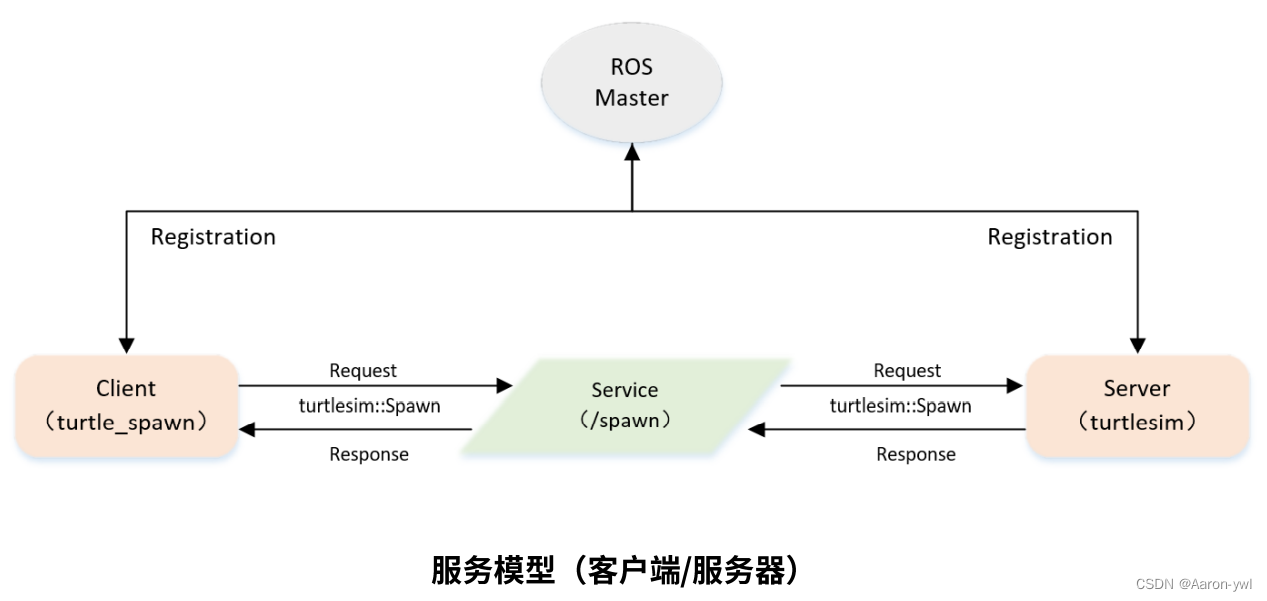
我们来分析一下小海龟仿真器服务模型中的客户端和服务器:
Sever端是小海龟仿真器/turtlesim,Client端产生Request的请求,发给Server端。Server端收到Request请求后产生一只小海龟,反馈一个Response给Client小海龟产生是否成功。Service的名称为/spawn,中间传输消息的数据结构为turtlesim::Spawn。Server端本身是进行模拟海龟运动的命令端,它的实现是通过给海龟发送速度(Twist)的指令,来控制海龟运动(本身通过Topic实现)。
Client端相当于海龟运动的开关,其发布Request来控制Server端。 通过自定义名为/turtle_command的Service实现,中间传输消息的数据类型为std_srvs::Trigger(一种针对服务标准std_srvs下的数据定义)来通信。Trigger意为触发,通过Trigger信号来触发Server端的运动指令。Server端接收这个Trigger信号后,可控制其是否要给海龟发送Twist指令,同时给Client端发送Response反馈告诉它海龟的运动状态。
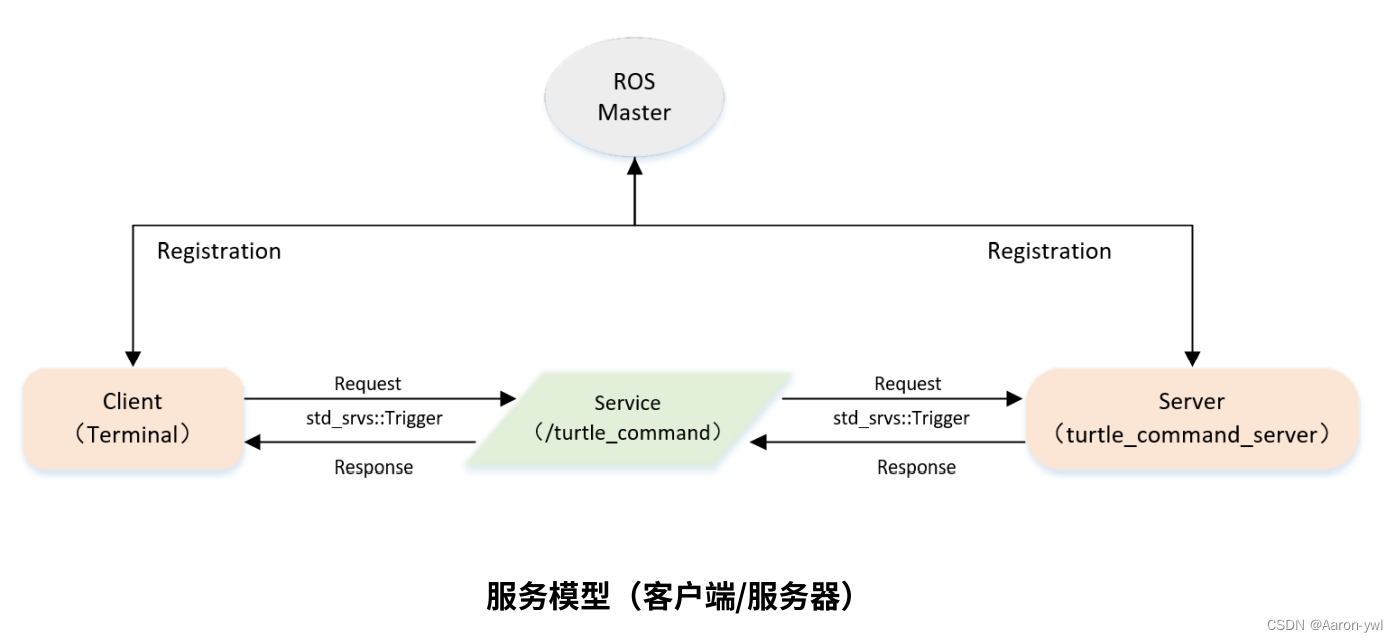
整个节点之间的通讯是在
ROS Master下进行的。
二、创建功能包
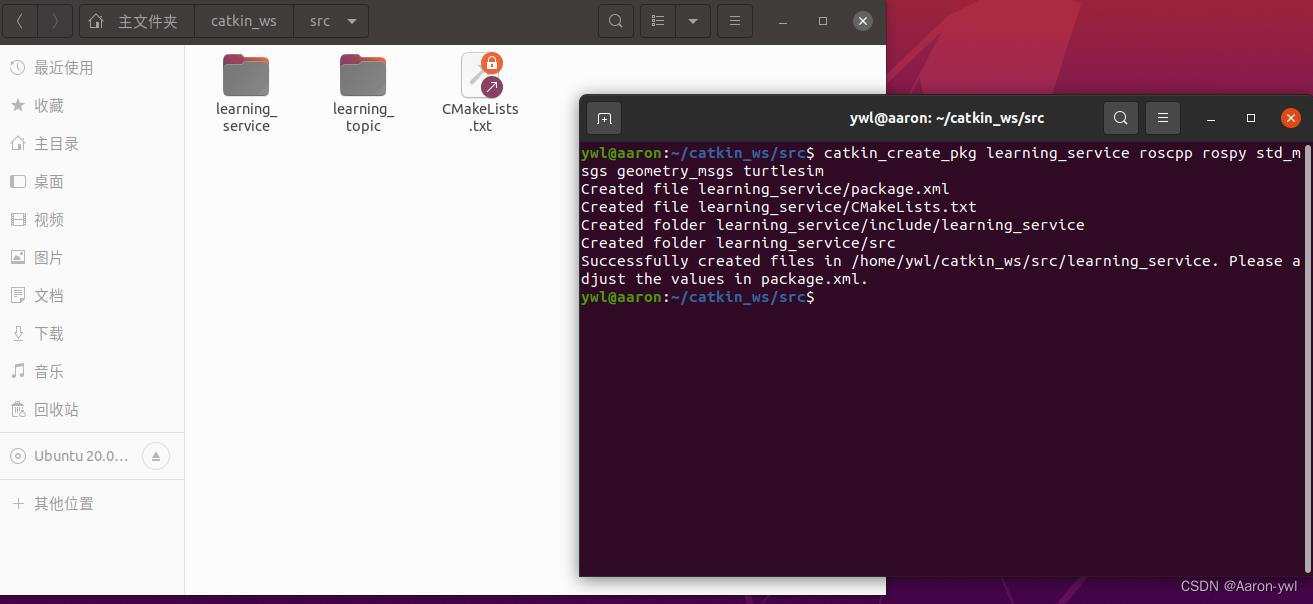
在本节我们将创建一个新的功能包,名字为learning_service,并创建依赖,复制下面命令即可:
cd ~/catkin_ws/src
catkin_create_pkg learning_service roscpp rospy std_msgs geometry_msgs turtlesim
三、创建Client代码
如何实现一个客户端Client?
- 初始化ROS
- 创建一个Client实例
- 发布服务请求数据
- 等待Server处理之后的应答结果
3.1 以C++为例
将代码turtle_spawn.cpp拷贝进src文件夹下:
完整代码为:
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程将请求/spawn服务,服务数据类型turtlesim::Spawn
*/
#include <ros/ros.h>
#include <turtlesim/Spawn.h>
int main(int argc, char** argv)
{
// 初始化ROS节点
ros::init(argc, argv, "turtle_spawn");
// 创建节点句柄
ros::NodeHandle node;
// 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
ros::service::waitForService("/spawn");
ros::ServiceClient add_turtle = node.serviceClient<turtlesim::Spawn>("/spawn");
// 初始化turtlesim::Spawn的请求数据
turtlesim::Spawn srv;
srv.request.x = 2.0;
srv.request.y = 2.0;
srv.request.name = "turtle2";
// 请求服务调用
ROS_INFO("Call service to spwan turtle[x:%0.6f, y:%0.6f, name:%s]",
srv.request.x, srv.request.y, srv.request.name.c_str());
add_turtle.call(srv);
// 显示服务调用结果
ROS_INFO("Spwan turtle successfully [name:%s]", srv.response.name.c_str());
return 0;
};
3.1.1 配置Client代码编译规则
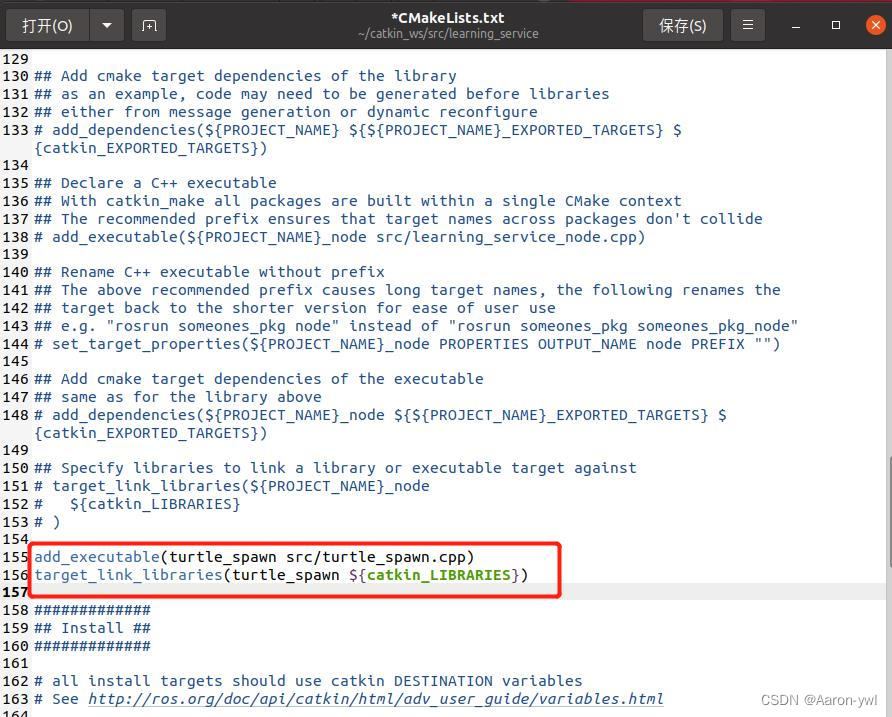
配置CMakeLists.txt编译规则:
- 设置需要编译的代码和生成的可执行文件;
- 设置链接库;
将以下代码复制进去:
add_executable(turtle_spawn src/turtle_spawn.cpp)
target_link_libraries(turtle_spawn ${catkin_LIBRARIES})
3.1.2 编译整个工作空间
cd ~/catkin_ws
catkin_make
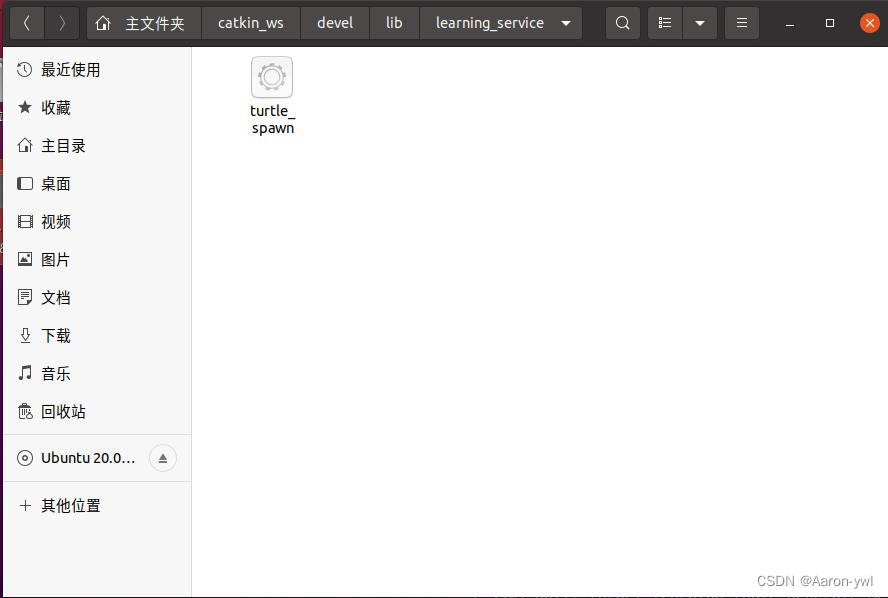
编译完成后能看到/debel/lib/learning_service目录下新生成的可执行文件:
3.1.3 配置环境变量
之前已经配置过。
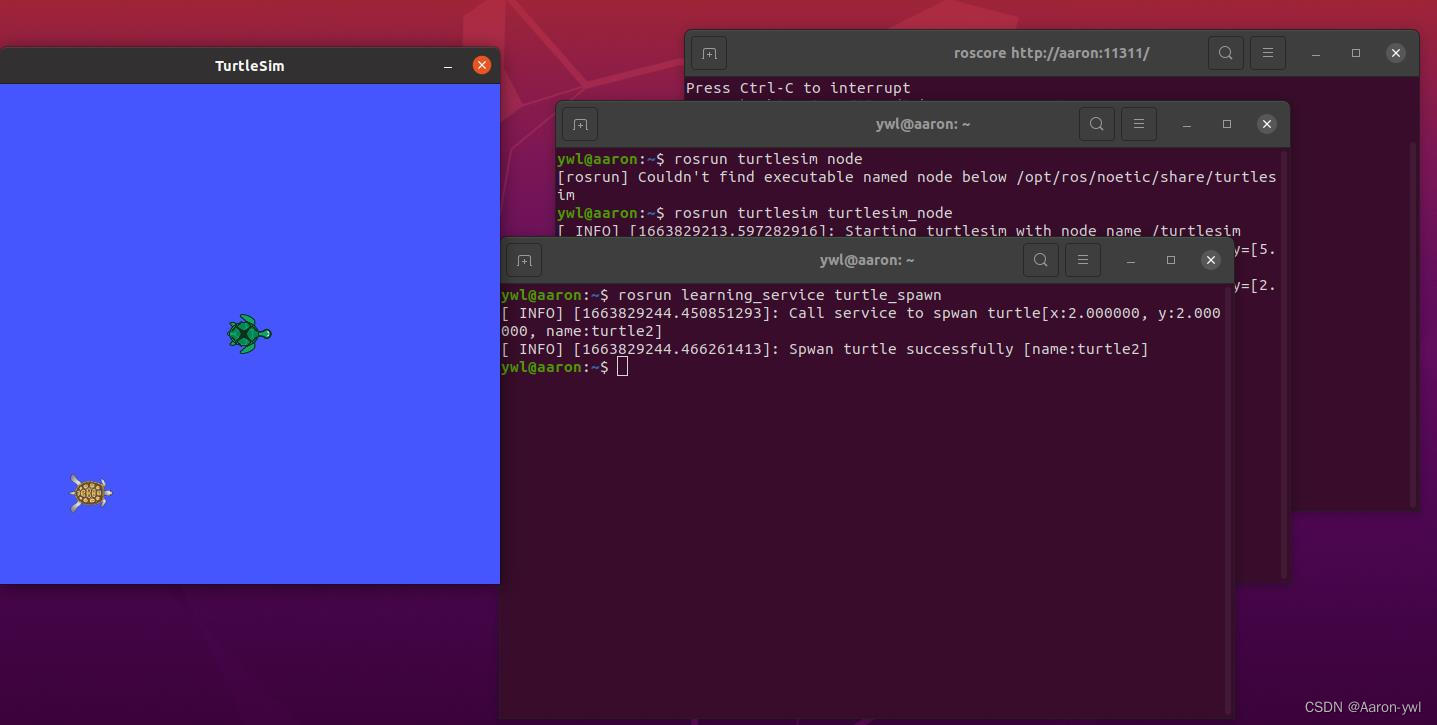
3.1.4 执行代码
roscore
rosrun turtlesim turtlesim_node
rosrun learning_service turtle_spawn
可以看到生成了第二只小海龟。
3.2 以Python为例
将代码turtle_spawn.py拷贝进新建立的scripts文件夹下(别忘了开启执行权限),完整代码为:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
########################################################################
#### Copyright 2020 GuYueHome (www.guyuehome.com). ###
########################################################################
# 该例程将请求/spawn服务,服务数据类型turtlesim::Spawn
import sys
import rospy
from turtlesim.srv import Spawn
def turtle_spawn():
# ROS节点初始化
rospy.init_node('turtle_spawn')
# 发现/spawn服务后,创建一个服务客户端,连接名为/spawn的service
rospy.wait_for_service('/spawn')
try:
add_turtle = rospy.ServiceProxy('/spawn', Spawn)
# 请求服务调用,输入请求数据
response = add_turtle(2.0, 2.0, 0.0, "turtle2")
return response.name
except rospy.ServiceException as e:
print(f"Service call failed: {e}")
if __name__ == "__main__":
#服务调用并显示调用结果
print(f"Spwan turtle sucessfully [name:{turtle_spawn()}]")
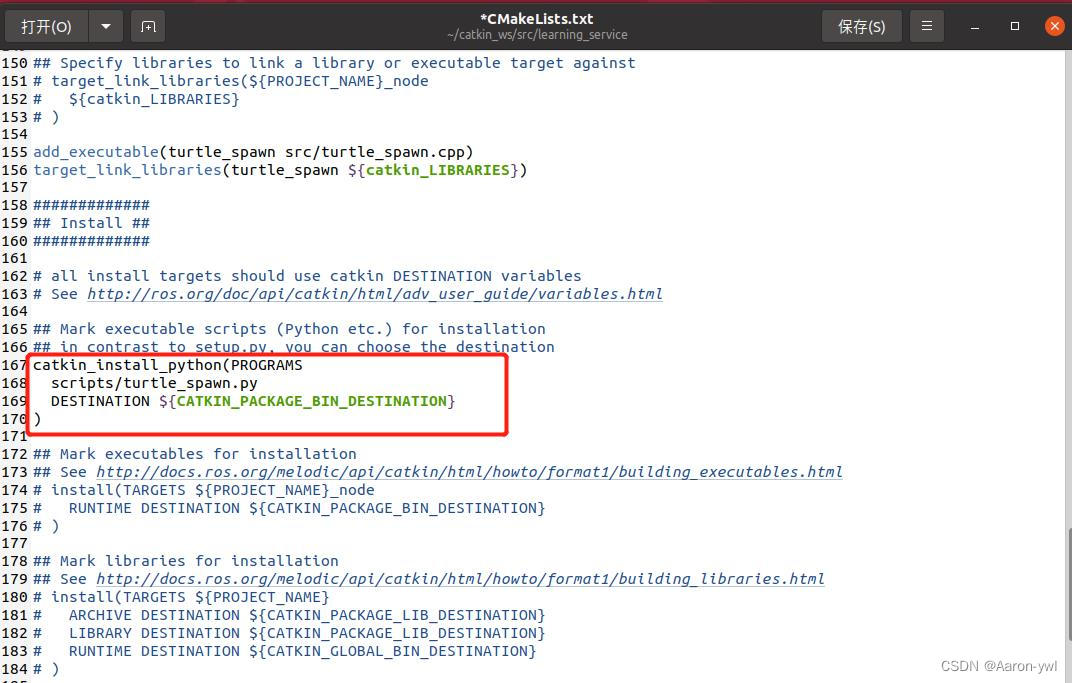
3.2.1 配置Client代码编译规则
打开CMakeLists.txt文件,配置Python代码编译规则:
3.2.2 编译整个工作空间
cd ~/catkin_ws
catkin_make
3.2.3 配置环境变量
之前已经配置过。
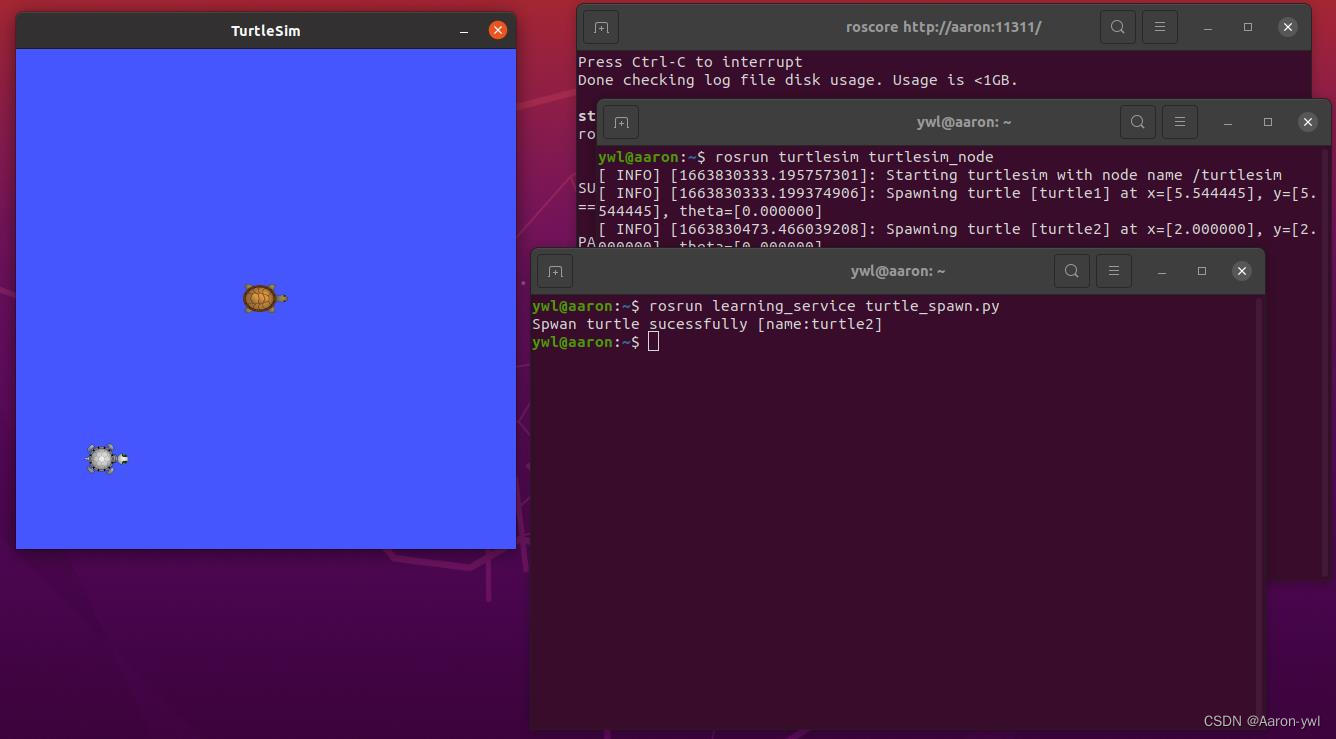
3.2.4 执行代码
roscore
rosrun turtlesim turtlesim_node
rosrun learning_service turtle_spawn.py
四、创建Server代码
如何实现一个服务器端Server?
- 初始化ROS
- 创建一个Server实例
- 循环等待服务请求,进入回调函数
- 在回调函数中完成服务功能的处理,并反馈应答数据
4.1 以C++为例
将代码turtle_command_server.cpp拷贝进src文件夹下:
完整代码为:
/***********************************************************************
Copyright 2020 GuYueHome (www.guyuehome.com).
***********************************************************************/
/**
* 该例程将执行/turtle_command服务,服务数据类型std_srvs/Trigger
*/
#include <ros/ros.h>
#include <geometry_msgs/Twist.h>
#include <std_srvs/Trigger.h>
ros::Publisher turtle_vel_pub;
bool pubCommand = false;
// service回调函数,输入参数req,输出参数res
bool commandCallback(std_srvs::Trigger::Request &req,
std_srvs::Trigger::Response &res)
{
pubCommand = !pubCommand;
// 显示请求数据
ROS_INFO("Publish turtle velocity command [%s]", pubCommand==true?"Yes":"No");
// 设置反馈数据
res.success = true;
res.message = "Change turtle command state!";
return true;
}
int main(int argc, char **argv)
{
// ROS节点初始化
ros::init(argc, argv, "turtle_command_server");
// 创建节点句柄
ros::NodeHandle n;
// 创建一个名为/turtle_command的server,注册回调函数commandCallback
ros::ServiceServer command_service = n.advertiseService("/turtle_command", commandCallback);
// 创建一个Publisher,发布名为/turtle1/cmd_vel的topic,消息类型为geometry_msgs::Twist,队列长度10
turtle_vel_pub = n.advertise<geometry_msgs::Twist>("/turtle1/cmd_vel", 10);
// 循环等待回调函数
ROS_INFO("Ready to receive turtle command.");
// 设置循环的频率
ros::Rate loop_rate(10);
while(ros::ok())
{
// 查看一次回调函数队列
ros::spinOnce();
// 如果标志为true,则发布速度指令
if(pubCommand)
{
geometry_msgs::Twist vel_msg;
vel_msg.linear.x = 0.5;
vel_msg.angular.z = 0.2;
turtle_vel_pub.publish(vel_msg);
}
//按照循环频率延时
loop_rate.sleep();
}
return 0;
}
在回调函数中给Client端的反馈数据res是与Trigger相对应的,我们可以查看一下Trigger的数据结构。可以使用rossrv指令查看service中的数据类型:
rossrv show std_srvs/Trigger

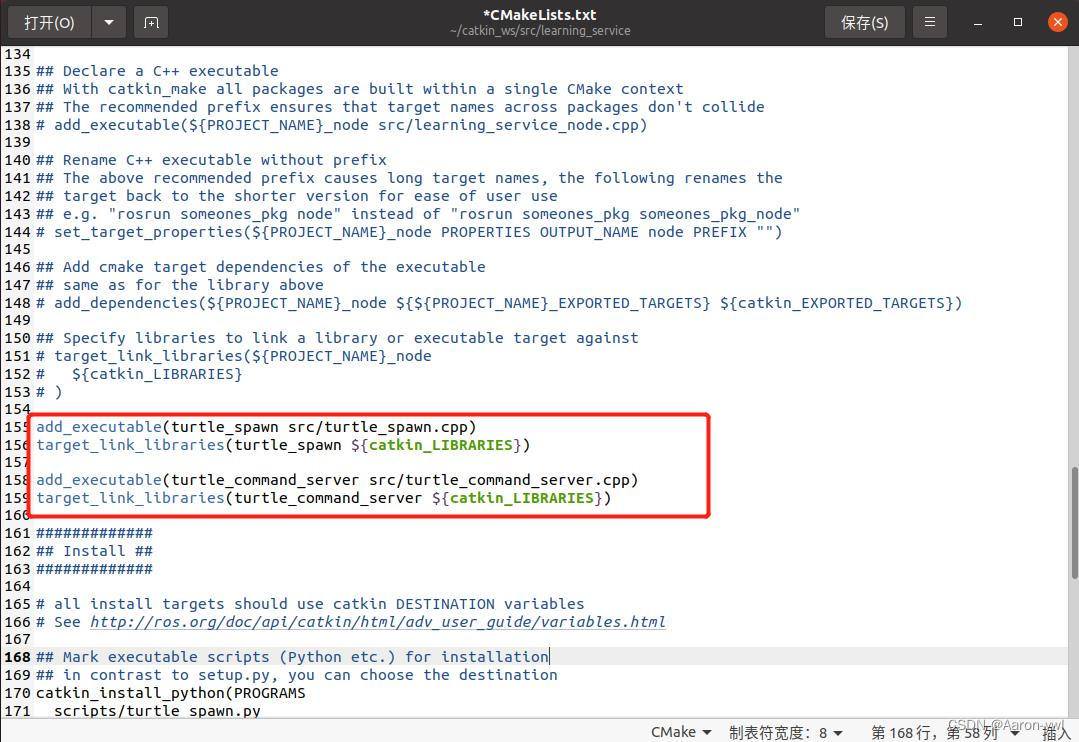
4.1.1 配置Server代码编译规则
配置CMakeLists.txt编译规则:
- 设置需要编译的代码和生成的可执行文件;
- 设置链接库;
将以下代码复制进去:
add_executable(turtle_command_server src/turtle_command_server.cpp)
target_link_libraries(turtle_command_server ${catkin_LIBRARIES})
4.1.2 编译整个工作空间
cd ~/catkin_ws
catkin_make
4.1.3 配置环境变量
之前已经配置过。
4.1.4 执行代码
roscore
rosrun turtlesim turtlesim_node
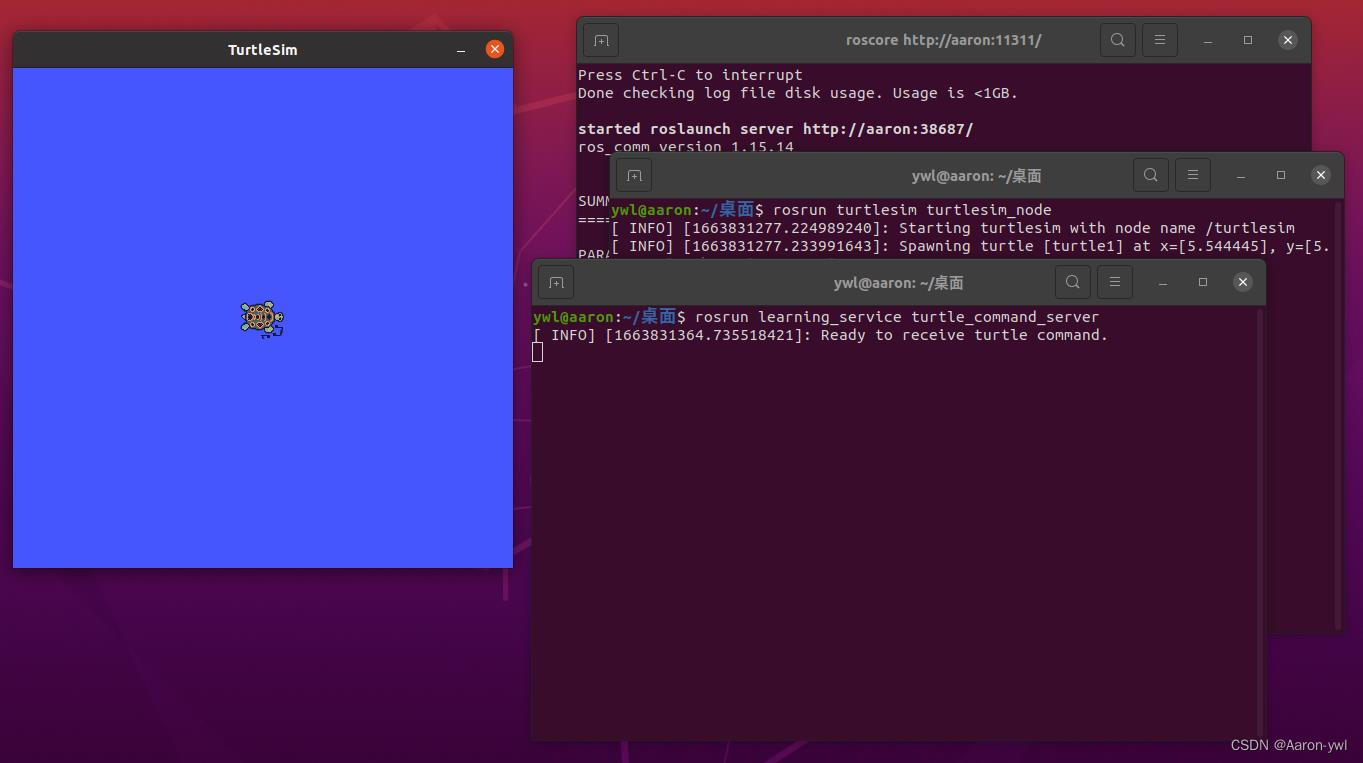
rosrun learning_service turtle_command_server
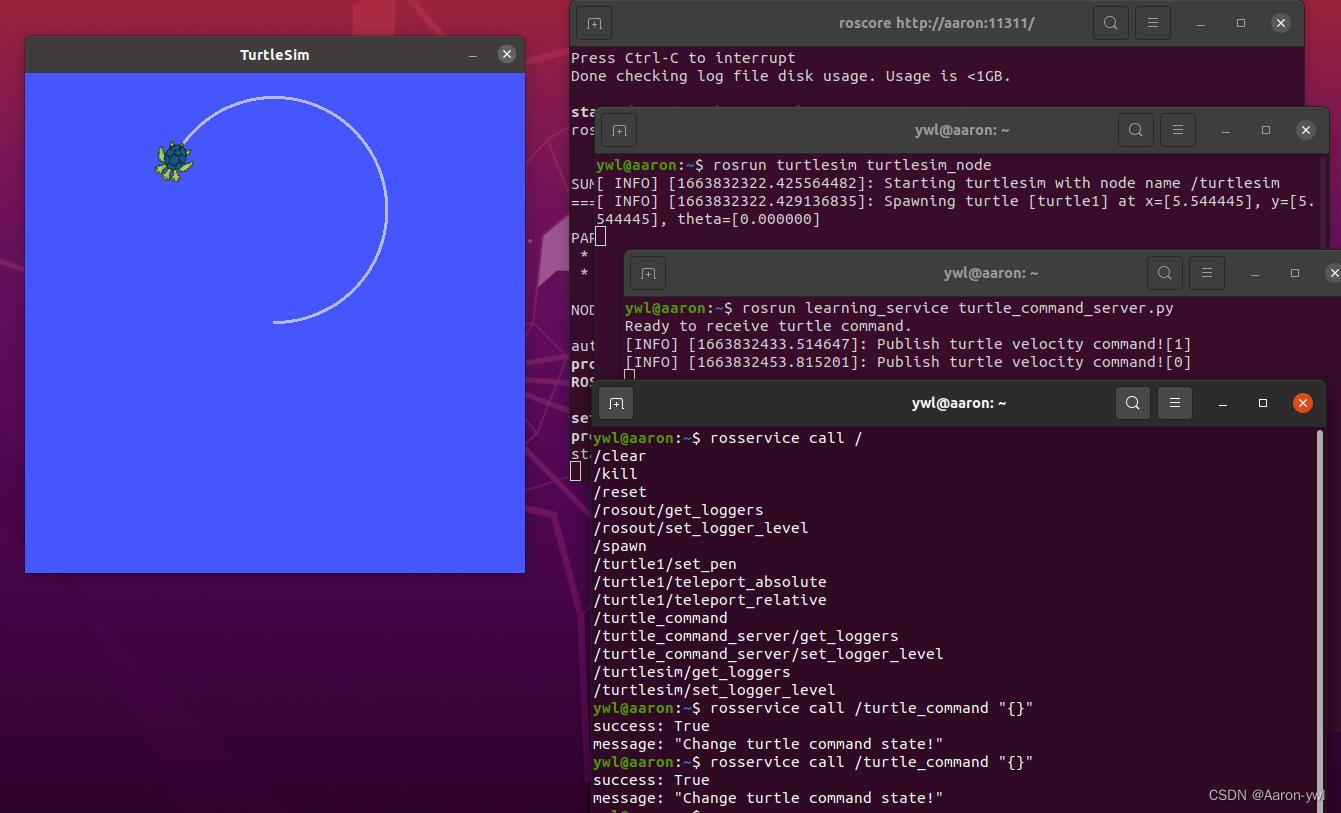
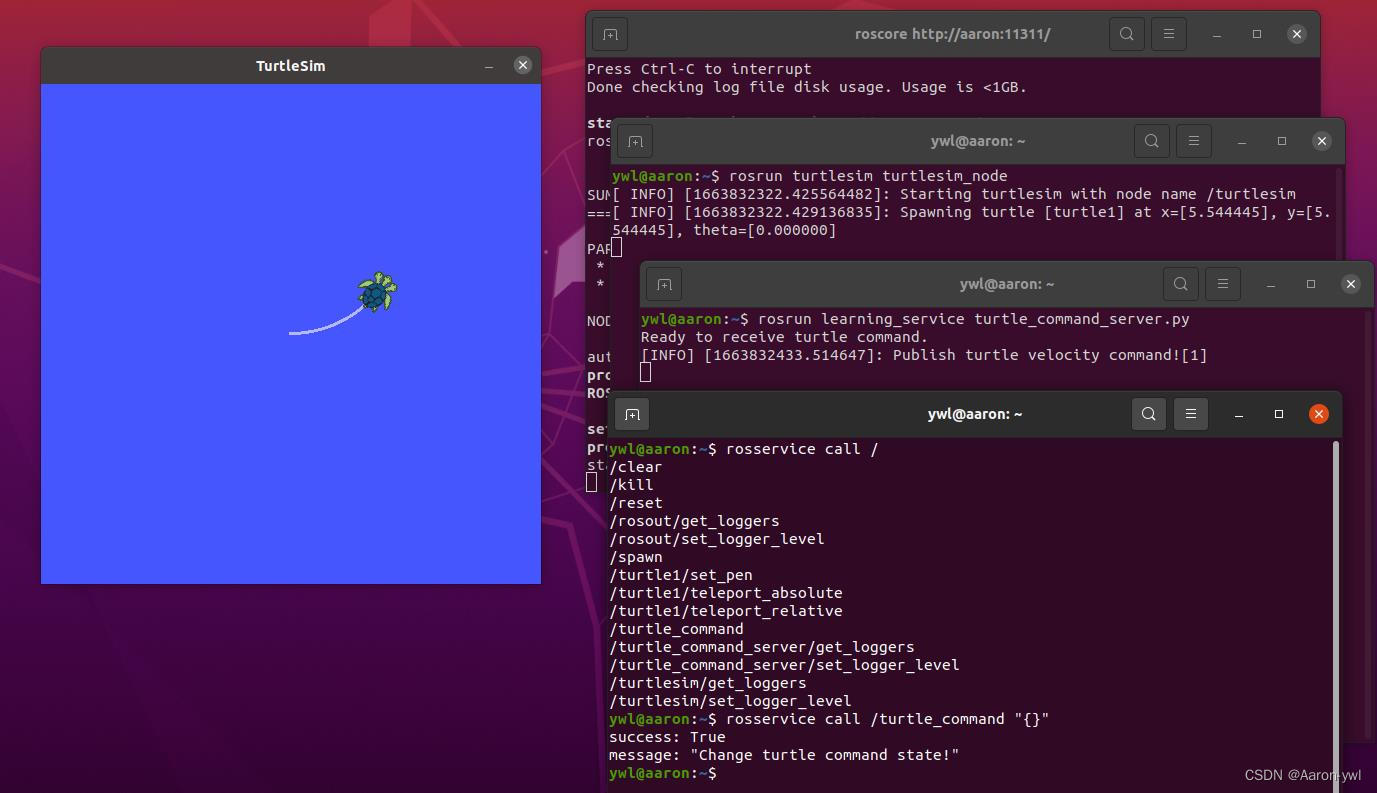
可以看到服务端已经启动了,如下图所示:
接着我们再打开一个终端,输入以下命令使得小海龟动起来(可以通过tab键进行补全):
rosservice call /turtle_command "{}"
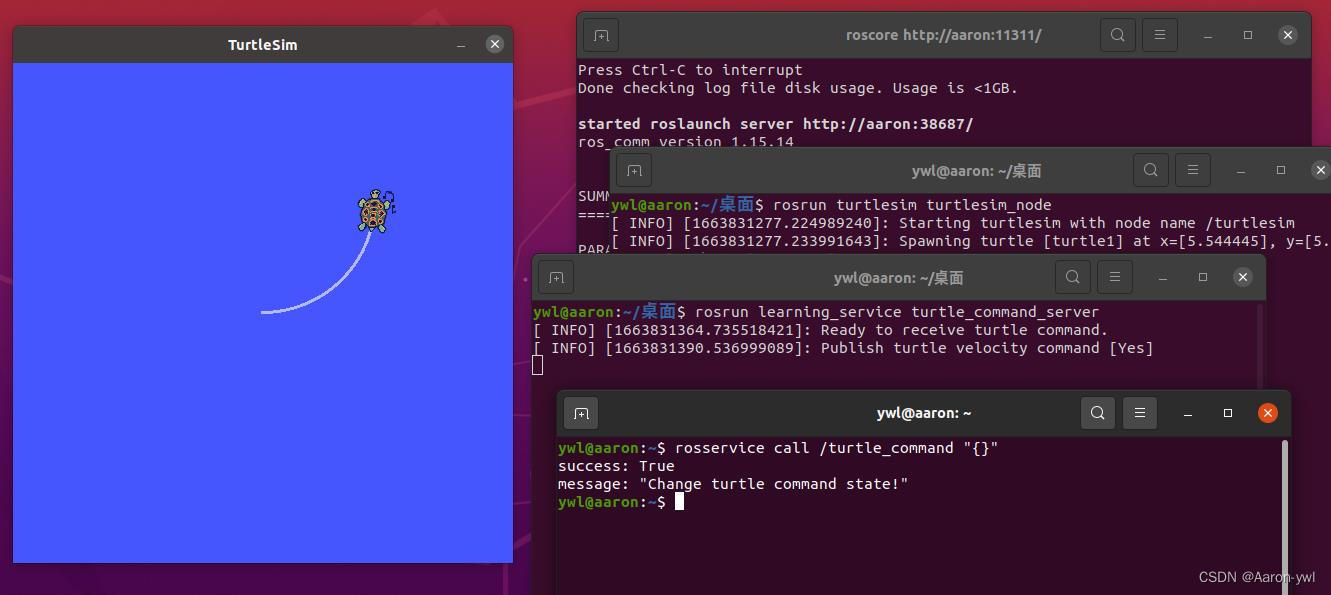
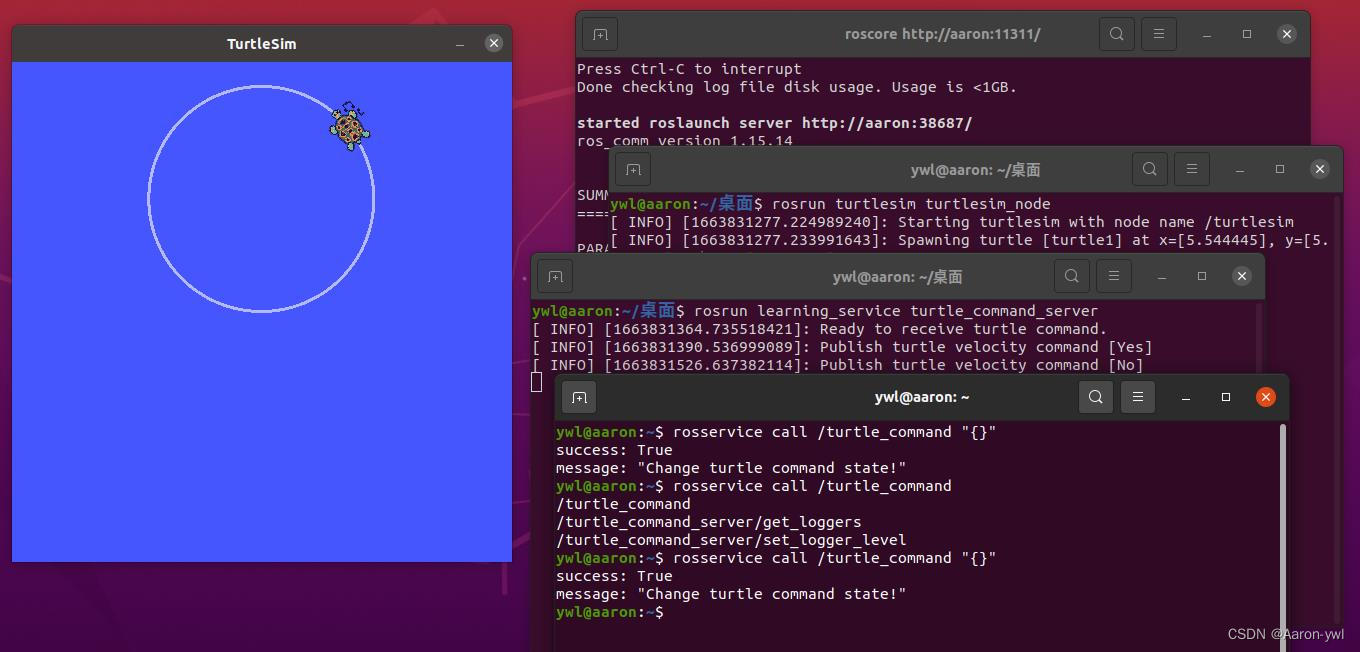
再输入一遍rosservice call /turtle_command "{}"这个命令,小海龟就会停下来了:
4.2 以Python为例
将代码turtle_command_server.py拷贝进新建立的scripts文件夹下(别忘了开启执行权限),完整代码为:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
########################################################################
#### Copyright 2020 GuYueHome (www.guyuehome.com). ###
########################################################################
# 该例程将执行/turtle_command服务,服务数据类型std_srvs/Trigger
import rospy
import _thread,time
from geometry_msgs.msg import Twist
from std_srvs.srv import Trigger, TriggerResponse
pubCommand = False;
turtle_vel_pub = rospy.Publisher('/turtle1/cmd_vel', Twist, queue_size=10)
def command_thread():
while True:
if pubCommand:
vel_msg = Twist()
vel_msg.linear.x = 0.5
vel_msg.angular.z = 0.2
turtle_vel_pub.publish(vel_msg)
time.sleep(0.1)
def commandCallback(req):
global pubCommand
pubCommand = bool(1-pubCommand)
# 显示请求数据
rospy.loginfo("Publish turtle velocity command![%d]", pubCommand)
# 反馈数据
return TriggerResponse(1, "Change turtle command state!")
def turtle_command_server():
# ROS节点初始化
rospy.init_node('turtle_command_server')
# 创建一个名为/turtle_command的server,注册回调函数commandCallback
s = rospy.Service('/turtle_command', Trigger, commandCallback)
# 循环等待回调函数
print("Ready to receive turtle command.")
_thread.start_new_thread(command_thread, ())
rospy.spin()
if __name__ == "__main__":
turtle_command_server()
在回调函数中给Client端的反馈数据res是与Trigger相对应的,我们可以查看一下Trigger的数据结构。可以使用rossrv指令查看service中的数据类型:
rossrv show std_srvs/Trigger
4.2.1 配置Server代码编译规则
打开CMakeLists.txt文件,配置Python代码编译规则:

4.2.2 编译整个工作空间
cd ~/catkin_ws
catkin_make
4.2.3 配置环境变量
之前已经配置过。
4.2.4 执行代码
roscore
rosrun turtlesim turtlesim_node
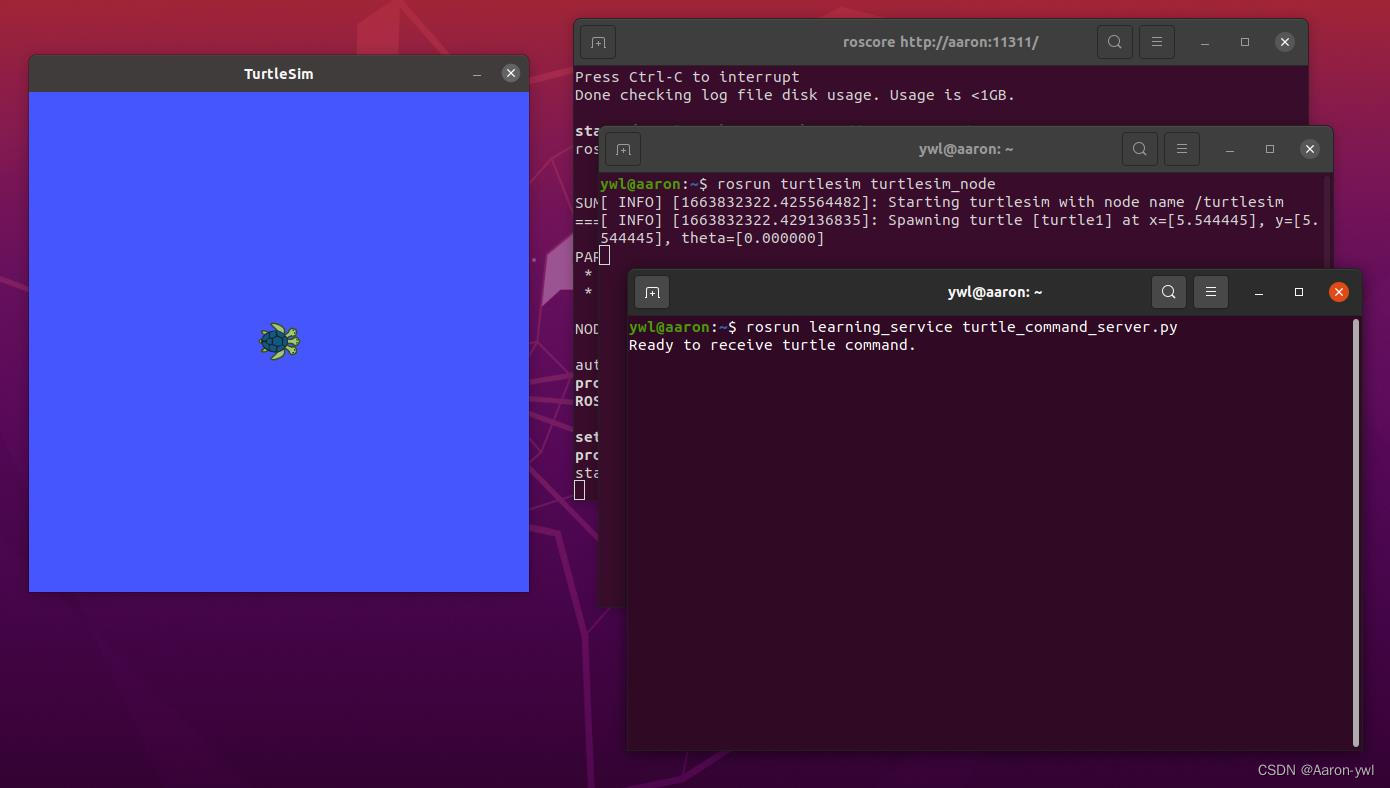
rosrun learning_service turtle_command_server.py
可以看到服务端已经启动了,如下图所示:
接着我们再打开一个终端,输入以下命令使得小海龟动起来(可以通过tab键进行补全):
rosservice call /turtle_command "{}"
再输入一遍rosservice call /turtle_command "{}"这个命令,小海龟就会停下来了: