1.
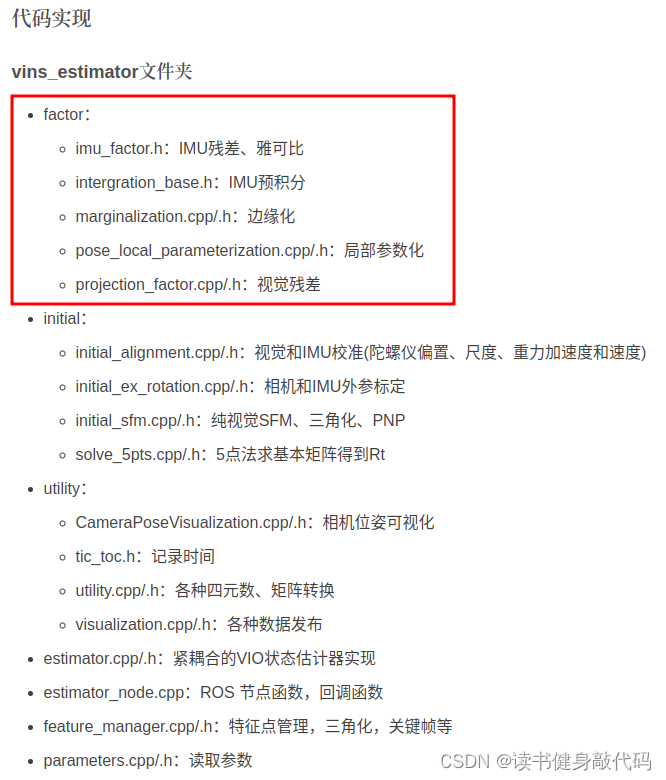
代码目录如下,重点和难点是factor部分,是关于IMU部分的,有较多关于IMU预积分公式的推导。
1. 条件变量con.wait读取测量值:getMeasurements()
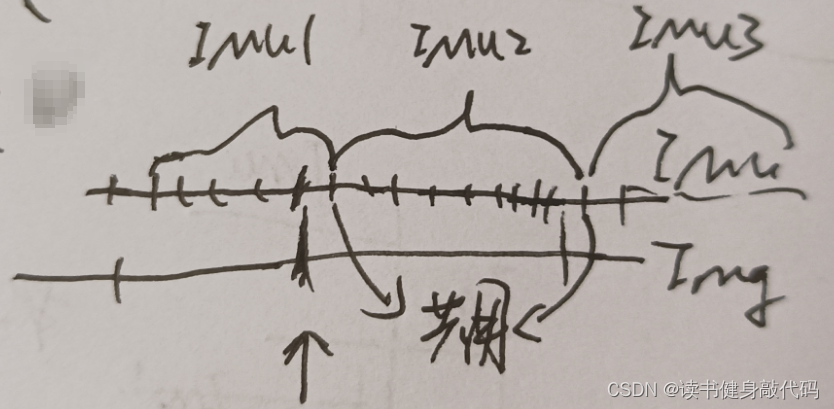
读取buf中IMU和IMG的数据,并进行align,最后的结果是这样:
2.读取到之后,对IMU数据进行预积分,
processIMU的实现需要结合公式弄明白。
3. 设置重定位帧
relo_buf:订阅pose graph node发布的回环帧数据,存到relo_buf队列中,供重定位使用
关于relo的部分需要搞清楚数据结构,何时pub?
为何要在process中执行estimator.setReloFrame,何时设置reloframe?
4. 重点函数estimator.processImage
视觉与IMU的初始化以及非线性优化的紧耦合
4.0 frame_count变量
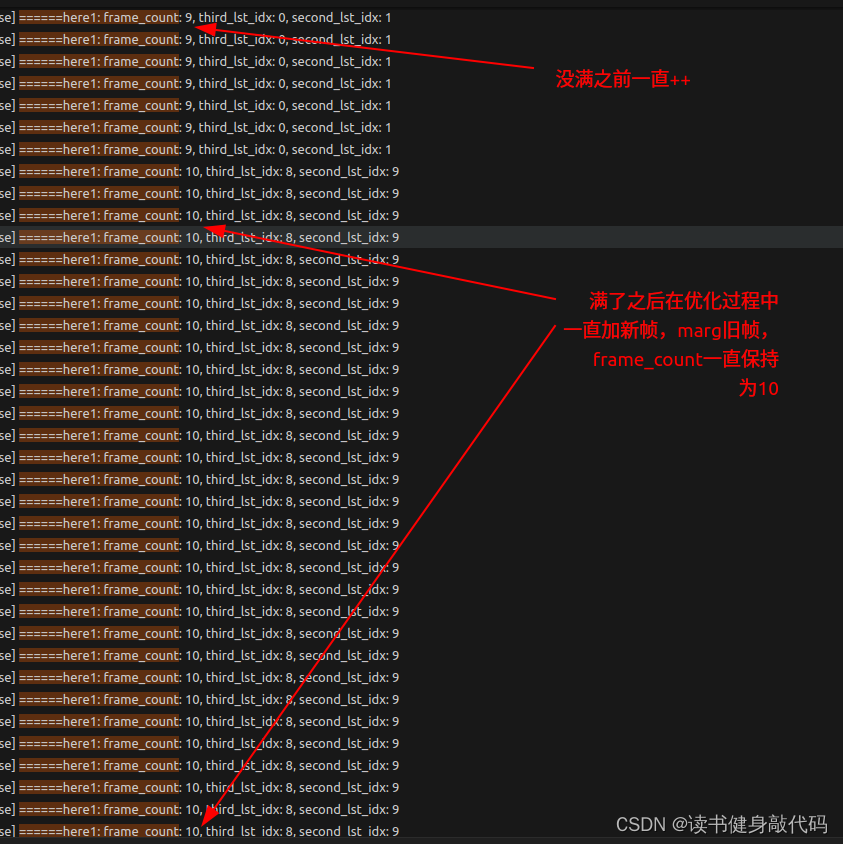
int frame_count;// 最新帧在滑动窗口中的索引(0,1,2,... ,WINDOW_SIZE-1)WINDOW_SIZE=10,等frame_count==10时就该进行marg了,以保证window内只有10帧数据,该变量在window没满之前会自增,达到window_size之后就一直保持为window_size(10)
4.1 addFeatureCheckParallax中的条件判断
如下代码,其中进入compensatedParallax2函数的条件比较难理解,这里debug研究一下
for (auto &it_per_id : feature)
{
// it_per_id.feature_per_frame.size()就是sliding window内该id的feature被tracking的次数,
// 这两个判断条件意思是:要有至少3帧,且第3新帧和第2新帧之间要tracking上,保证有共视点来计算视差 TODO:可以debug看看,Done:已经debug过了,确实是这个意思
// 这里img一定是it_per_id.feature_per_frame.size()>=1,即至少tracking了1次,即使在1st lost了但是在3rd和2nd时分别都tracking上了,那么3rd和2nd之间就有视差
int condition_2 = it_per_id.start_frame + int(it_per_id.feature_per_frame.size()) - 1;
if (it_per_id.start_frame <= frame_count - 2 &&
it_per_id.start_frame + int(it_per_id.feature_per_frame.size()) - 1 >= frame_count - 1) //后一个判断条件是什么意思?
{
ROS_DEBUG("condition matched: condition_1: %d, condition_2: %d, frame_count: %d", it_per_id.start_frame, condition_2, frame_count);
// 对于给定id的特征点,计算第2最新帧和第3最新帧之间该特征点的视差(当前帧frame_count是第1最新帧)
//(需要使用IMU数据补偿由于旋转造成的视差)
parallax_sum += compensatedParallax2(it_per_id, frame_count);
parallax_num++;
} else {
ROS_WARN("condition not matched: condition_1: %d, condition_2: %d, frame_count: %d", it_per_id.start_frame, condition_2, frame_count);
}
}
如下所示:
一个最极端的例子:
该feature在3rd时被extract出来,it_per_id.feature_per_frame.size()=1,
在2nd时被tracking上了,it_per_id.feature_per_frame.size()=2,
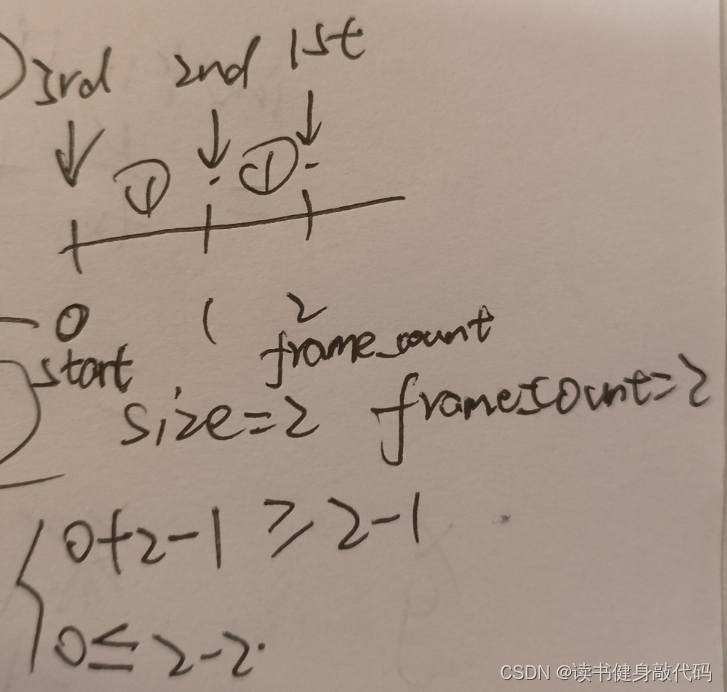
在1st时lost掉了,it_per_id.feature_per_frame.size()=2,start=0,frame_count=2
也是符合条件的:如下打印的0,1,2就是这种例子,start=0,size()=1+1=2,frame_count=2
而0,0,2则对应的是该feature目前只在[0]帧被extract出来一次,没有被tracking上
2,2,2则代表在3rd刚被extract出来,故在3rd和2nd之间不可能存在共视点,也就没有视差。
调试结果:
4.2 compensatedParallax2()
/**
* 对于给定id的特征点
* 计算第2最新帧和第3最新帧之间该特征点的视差(当前帧frame_count是第1最新帧)
* (需要使用IMU数据补偿由于旋转造成的视差)
*/
double FeatureManager::compensatedParallax2(const FeaturePerId &it_per_id, int frame_count)
{
//check the second last frame is keyframe or not
//parallax betwwen seconde last frame and third last frame
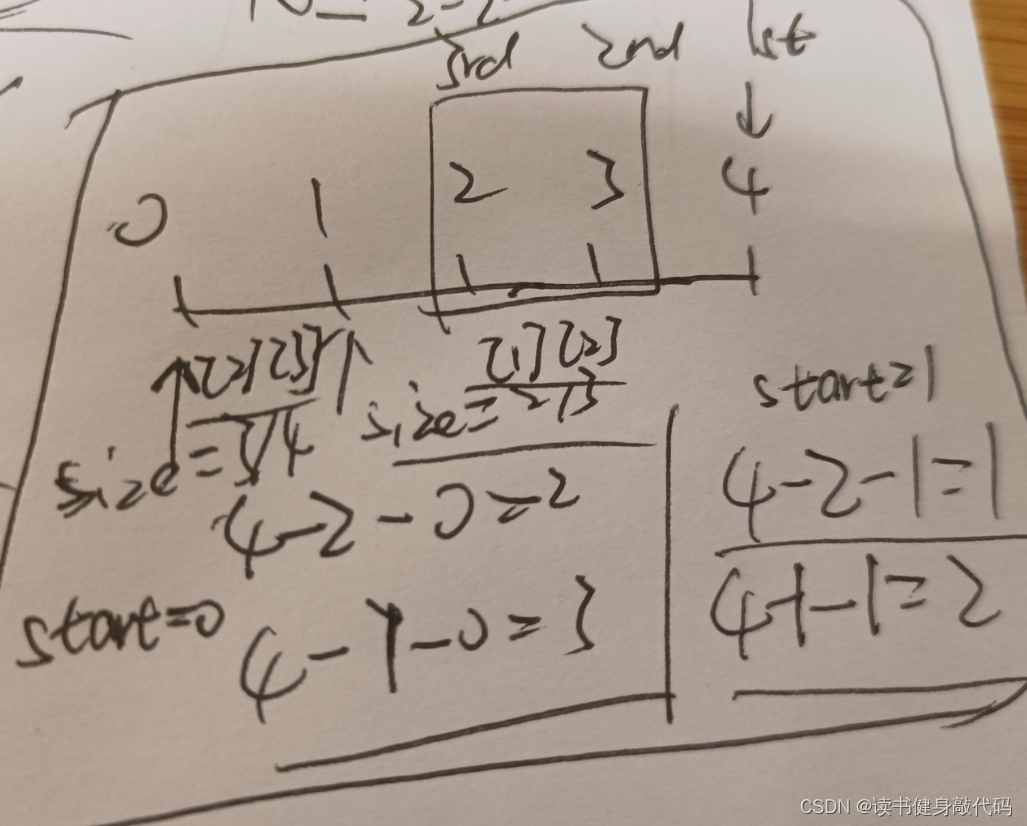
//计算3rd和2nd在it_per_id.feature_per_frame下的index,size是该id的feature已经被tracking的次数,
// 如frame_count=4时,从第0帧开始被tracking,start_frame=0,则3rd和2nd时,it_per_id.feature_per_frame.size()分别为3[index=2],4[index=3],则他们的index分别为4-2-0=2,4-1-0=3
// start_frame=1时,size()=2[index=1],3[index=2], index分别为4-2-1=1,4-1-1=2,图示见博客4.2节:https://blog.csdn.net/qq_37746927/article/details/134436475
int third_lst_idx = frame_count - 2 - it_per_id.start_frame;
int second_lst_idx = frame_count - 1 - it_per_id.start_frame;
//这里的window size是10
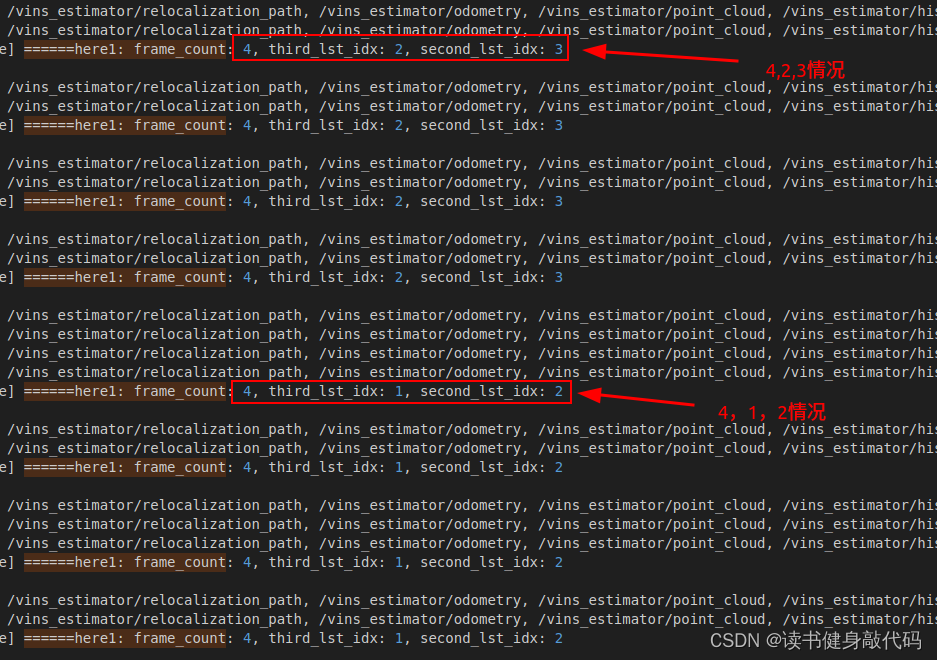
ROS_INFO("======here1: frame_count: %d, third_lst_idx: %d, second_lst_idx: %d", frame_count, third_lst_idx, second_lst_idx);
const FeaturePerFrame &frame_i = it_per_id.feature_per_frame[third_lst_idx];//third last frame
const FeaturePerFrame &frame_j = it_per_id.feature_per_frame[second_lst_idx];//seconde last frame
double ans = 0;
Vector3d p_j = frame_j.point;
double u_j = p_j(0);
double v_j = p_j(1);
Vector3d p_i = frame_i.point;
Vector3d p_i_comp;
//int r_i = frame_count - 2;
//int r_j = frame_count - 1;
//p_i_comp = ric[camera_id_j].transpose() * Rs[r_j].transpose() * Rs[r_i] * ric[camera_id_i] * p_i;
p_i_comp = p_i;
double dep_i = p_i(2);//深度
double u_i = p_i(0) / dep_i;
double v_i = p_i(1) / dep_i;
double du = u_i - u_j, dv = v_i - v_j;//计算i,j帧间的视差
double dep_i_comp = p_i_comp(2);
double u_i_comp = p_i_comp(0) / dep_i_comp;
double v_i_comp = p_i_comp(1) / dep_i_comp;
double du_comp = u_i_comp - u_j, dv_comp = v_i_comp - v_j;
//这俩货不一样??
ans = max(ans, sqrt(min(du * du + dv * dv, du_comp * du_comp + dv_comp * dv_comp)));
return ans;
}
3rd和2nd的index计算图示
调试结果符合预期:

![[黑马程序员SpringBoot2]——开发实用篇3](https://img-blog.csdnimg.cn/76b3fdc560a84965bc0db1eeedb4f43a.png)