前端开发中可能会使用到以下软件,它们各自具有不同的作用:
代码编辑器:例如Sublime Text、Atom、Visual Studio Code等,用于编写和编辑HTML、CSS和JavaScript等前端代码。网页浏览器:例如Chrome、Firefox、Safari等&a…
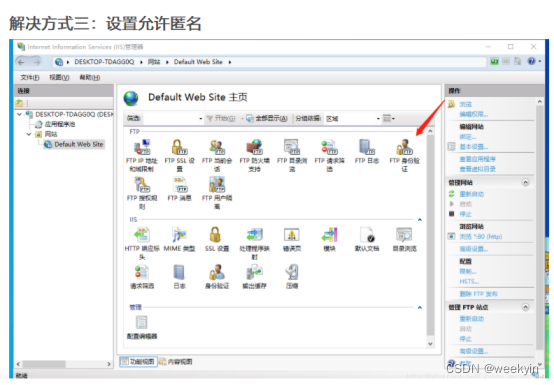
第一步:按【Win R】快捷键打开运行对话框,输入“optionalfeatures”后,按回车键
第二步:从“启用或关闭Windows功能”弹窗中找到Internet Information Services(或者中文版Internet信息服务)并打开,配置IIS并点击确…
今年PGC直播期间将有最高2000万G-Coin掉落,究竟花落谁家咱们拭目以待 公告原文:Watch PGC 2023 Live And Earn G-Coins! 如何赚取高额G-Coin?
Throughout the PGC 2023, an astounding 20,000,000 G-Coins will be up for grabs as part of …




![Banana Pi [BPi-R3-Mini] 回顾和主线 ImmortalWrt 固件支持](https://img-blog.csdnimg.cn/f1e8d25c041f40728917e14d45f2e010.png)
