精度提升
众所周知,非极大值抑制NMS是目标检测常用的后处理算法,用于剔除冗余检测框,本文将对可以提升精度的各种NMS方法及其变体进行阶段性总结。
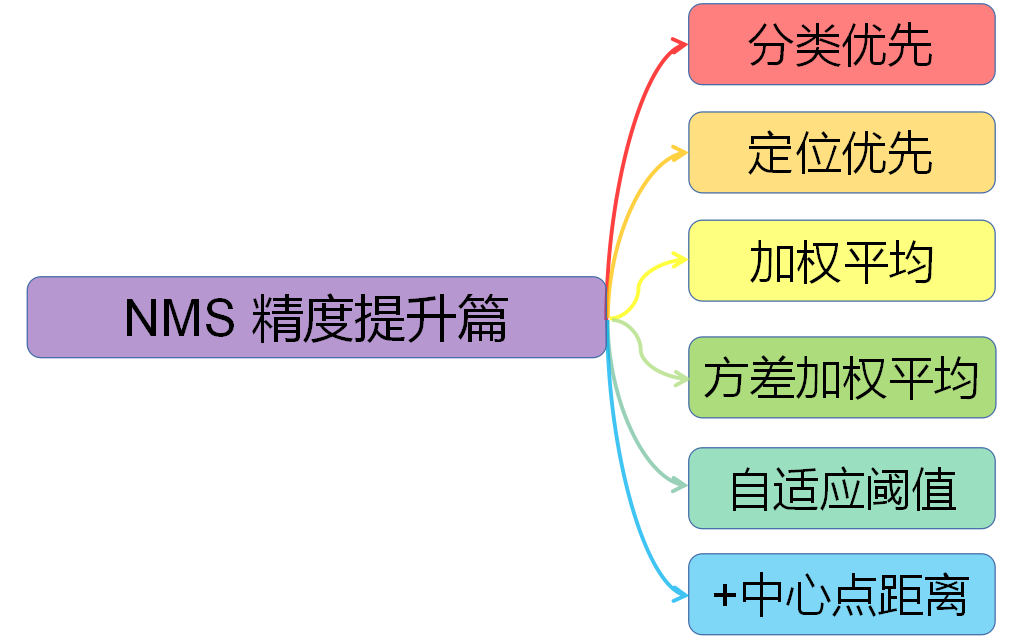
总体概要:
对NMS进行分类,大致可分为以下六种,这里是依据它们在各自论文中的核心论点进行分类,这些算法可以同时属于多种类别。
- 分类优先:传统NMS,Soft-NMS (ICCV 2017)
- 定位优先:IoU-Guided NMS (ECCV 2018)
- 加权平均:Weighted NMS (ICME Workshop 2017)
- 方差加权平均:Softer-NMS (CVPR 2019)
- 自适应阈值:Adaptive NMS (CVPR 2019)
- +中心点距离:DIoU-NMS (AAAI 2020)
分类优先
传统NMS有多个名称,据不完全统计可以被称为:Traditional / Original / Standard / Greedy NMS,为统一起见,下称Traditional NMS。
Traditional NMS算法是最为经典的版本,伪代码如下:
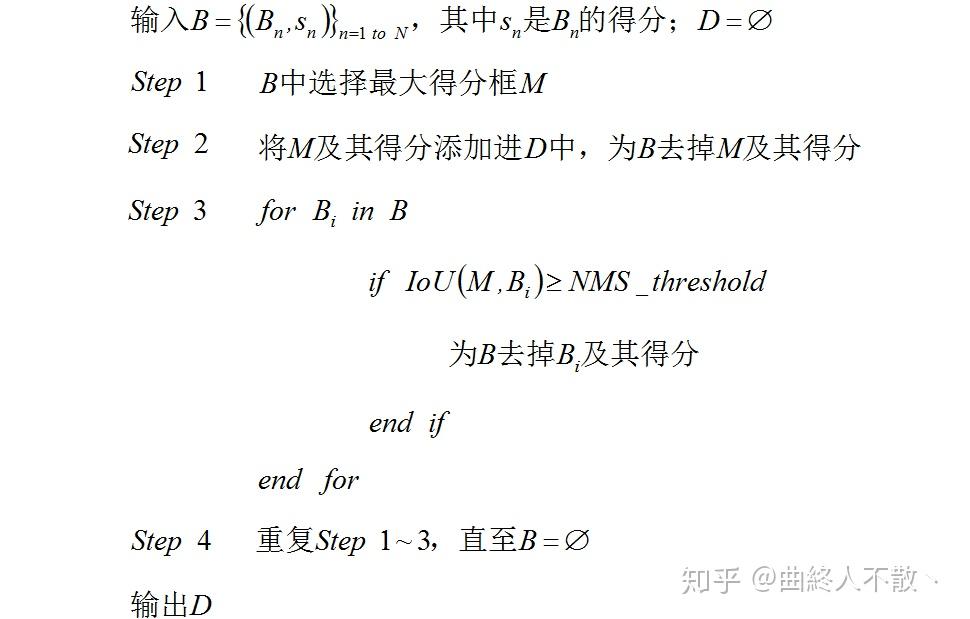
算法流程解读:
给出一张图片和上面许多物体检测的候选框(即每个框可能都代表某种物体),但是这些框很可能有互相重叠的部分,我们要做的就是只保留最优的框。假设有N个框,每个框被分类器计算得到的分数为Si, 1<=i<=N。
0、建造一个存放待处理候选框的集合H,初始化为包含全部N个框;
建造一个存放最优框的集合M,初始化为空集。
1、将所有集合 H 中的框进行排序,选出分数最高的框 m,从集合 H 移到集合 M;
2、遍历集合 H 中的框,分别与框 m 计算交并比(Interection-over-union,IoU),如果高于某个阈值(一般为0~0.5),则认为此框与 m 重叠,将此框从集合 H 中去除。
3、回到第1步进行迭代,直到集合 H 为空。集合 M 中的框为我们所需。
需要优化的参数:
IoU 的阈值是一个可优化的参数,一般范围为0~0.5,可以使用交叉验证来选择最优的参数。
示例:
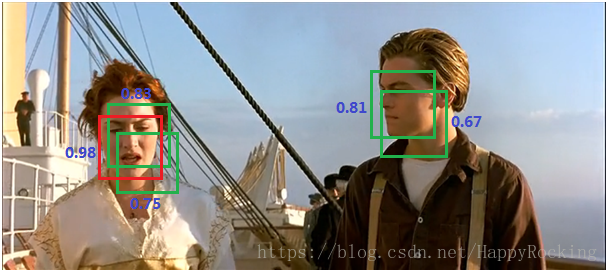
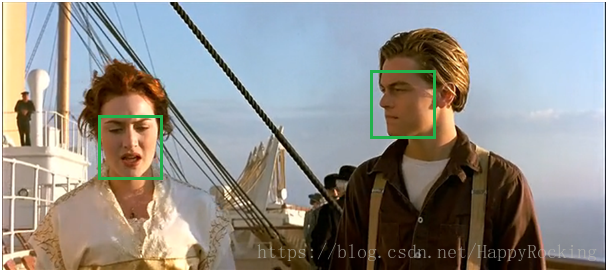
比如人脸识别的一个例子:
已经识别出了 5 个候选框,但是我们只需要最后保留两个人脸。
首先选出分数最大的框(0.98),然后遍历剩余框,计算 IoU,会发现露丝脸上的两个绿框都和 0.98 的框重叠率很大,都要去除。
然后只剩下杰克脸上两个框,选出最大框(0.81),然后遍历剩余框(只剩下0.67这一个了),发现0.67这个框与 0.81 的 IoU 也很大,去除。
至此所有框处理完毕,算法结果:
缺点:
- 顺序处理的模式,计算IoU拖累了运算效率。
- 剔除机制太严格,依据NMS阈值暴力剔除。
- 阈值是经验选取的。
- 评判标准是IoU,即只考虑两个框的重叠面积,这对描述box重叠关系或许不够全面。
Soft-NMS是Traditional NMS的推广,主要旨在缓解Traditional NMS的第二条缺点。
数学上看,Traditional NMS的剔除机制可视为
s i = { 0 , I o U ( M , B i ) ⩾ t h r e s h s i , I o U ( M , B i ) < t h r e s h s_i=\left\{ \begin{array}{lc} 0, & IoU(M,B_i)\geqslant thresh\\ s_i, & IoU(M,B_i)<thresh\\ \end{array}\right. si={0,si,IoU(M,Bi)⩾threshIoU(M,Bi)<thresh
显然,对于IoU≥NMS阈值的相邻框,Traditional NMS的做法是将其得分暴力置0。这对于有遮挡的案例较不友好。因此Soft-NMS的做法是采取得分惩罚机制,使用一个与IoU正相关的惩罚函数对得分 s 进行惩罚。
线性惩罚:
s i = { s i ( 1 − I o U ( M , B i ) ) , I o U ( M , B i ) ⩾ t h r e s h s i , I o U ( M , B i ) < t h r e s h s_i=\left\{ \begin{array}{lc} s_i(1-IoU(M,B_i)), & IoU(M,B_i)\geqslant thresh\\ s_i, & IoU(M,B_i)<thresh\\ \end{array}\right. si={si(1−IoU(M,Bi)),si,IoU(M,Bi)⩾threshIoU(M,Bi)<thresh
其中 M 代表当前的最大得分框。
线性惩罚有不光滑的地方,因而还有一种高斯惩罚:
s i = s i e − I o U ( M , B i ) 2 σ s_i=s_ie^{-\frac{IoU(M,B_i)^2}{\sigma}} si=sie−σIoU(M,Bi)2
在迭代终止之后,Soft-NMS依据预先设定的得分阈值来保留幸存的检测框,通常设为0.0001
该文对两种惩罚方法的超参数也进行了实验,结果验证了超参数的不敏感性。经本人实测,Soft-NMS在Faster R-CNN中的提升约有0.5-0.8个点的AP提升。
缺点:
- 仍然是顺序处理的模式,运算效率比Traditional NMS更低。
- 对双阶段算法友好,而在一些单阶段算法上可能失效。
- 如果存在定位与得分不一致的情况,则可能导致定位好而得分低的框比定位差得分高的框惩罚更多(遮挡情况下)。
- 评判标准是IoU,即只考虑两个框的重叠面积,这对描述box重叠关系或许不够全面。
定位优先
IoU-Guided NMS出现于IoU-Net一文中,研究者认为框的定位与分类得分可能出现不一致的情况,特别是框的边界有模棱两可的情形时。因而该文提出了IoU预测分支,来学习定位置信度,进而使用定位置信度来引导NMS。

具体来说,就是使用定位置信度作为NMS的筛选依据,每次迭代挑选出最大定位置信度的框 M ,然后将IoU≥NMS阈值的相邻框剔除,但把冗余框及其自身的最大分类得分直接赋予 M ,这样一来,最终输出的框必定是同时具有最大分类得分与最大定位置信度的框。
优点:
IoU-Guided NMS有助于提高严格指标下的精度,如AP75, AP90。
缺点:
- 顺序处理的模式,运算效率与Traditional NMS相同。
- 需要额外添加IoU预测分支,造成计算开销。
- 评判标准是IoU,即只考虑两个框的重叠面积,这对描述box重叠关系或许不够全面。
加权平均
多框共同决定一框
Weighted NMS出现于ICME Workshop 2017《Inception Single Shot MultiBox Detector for object detection》一文中。论文认为Traditional NMS每次迭代所选出的最大得分框未必是精确定位的,冗余框也有可能是定位良好的。那么与直接剔除机制不同,Weighted NMS顾名思义是对坐标加权平均,加权平均的对象包括 M 自身以及IoU≥NMS阈值的相邻框。
M=\frac{\sum\limits_iw_iB_i}{\sum\limits_iw_i},\quad B_i\in{B|IoU(M,B)\geqslant thresh}\cup{M}
加权的权重为 w_i=s_iIoU(M,B_i) ,表示得分与IoU的乘积。
优点:
Weighted NMS通常能够获得更高的Precision和Recall,以本人的使用情况来看,只要NMS阈值选取得当,Weighted NMS均能稳定提高AP与AR,无论是AP50还是AP75,也不论所使用的检测模型是什么。
缺点:
- 顺序处理模式,且运算效率比Traditional NMS更低。
- 加权因子是IoU与得分,前者只考虑两个框的重叠面积,这对描述box重叠关系或许不够全面;而后者受到定位与得分不一致问题的限制。
方差加权平均
Softer-NMS同样是坐标加权平均的思想,不同在于权重 w_i 发生变化,以及引入了box边界的不确定度。
关于目标检测box不确定度,可参考笔者的另一篇文章《一文了解目标检测边界框概率分布》
加权公式如下:
M = ∑ i w i B i / σ i 2 ∑ i w i / σ i 2 , B i ∈ { B ∣ I o U ( M , B ) ⩾ t h r e s h } ∪ { M } M=\frac{\sum\limits_iw_iB_i/\sigma_i^2}{\sum\limits_iw_i/\sigma_i^2},\quad B_i\in\{B|IoU(M,B)\geqslant thresh\}\cup\{M\} M=i∑wi/σi2i∑wiBi/σi2,Bi∈{B∣IoU(M,B)⩾thresh}∪{M}
其中权重 w_i=e{-\frac{(1-IoU(M,B_i))2}{\sigma_t}} 抛弃了得分 s_i ,而只与IoU有关。
在加权平均的过程中,权重越大有两种情形:1. 与 M 的IoU越大;2. 方差越小,代表定位不确定度越低。

var voting表示方差加权平均
优点:
- 可以与Traditional NMS或Soft-NMS结合使用。
- 通常可以稳定提升AP与AR。
缺点:
- 顺序处理模式,且运算效率比Traditional NMS更低。
- 需要修改模型来预测方差。
- 加权因子是IoU与方差,前者依然只考虑两个框的重叠面积,这对描述box重叠关系或许不够全面。
自适应阈值
以上这些NMS都基于这样的假设:与当前最高得分框重叠越大,越有可能是冗余框。
Adaptive NMS的研究者认为这在物体之间有严重遮挡时可能带来不好的结果。我们期望当物体分布稀疏时,NMS大可选用小阈值以剔除更多冗余框;而在物体分布密集时,NMS选用大阈值,以获得更高的召回。既然如此,该文提出了密度预测模块,来学习一个框的密度。
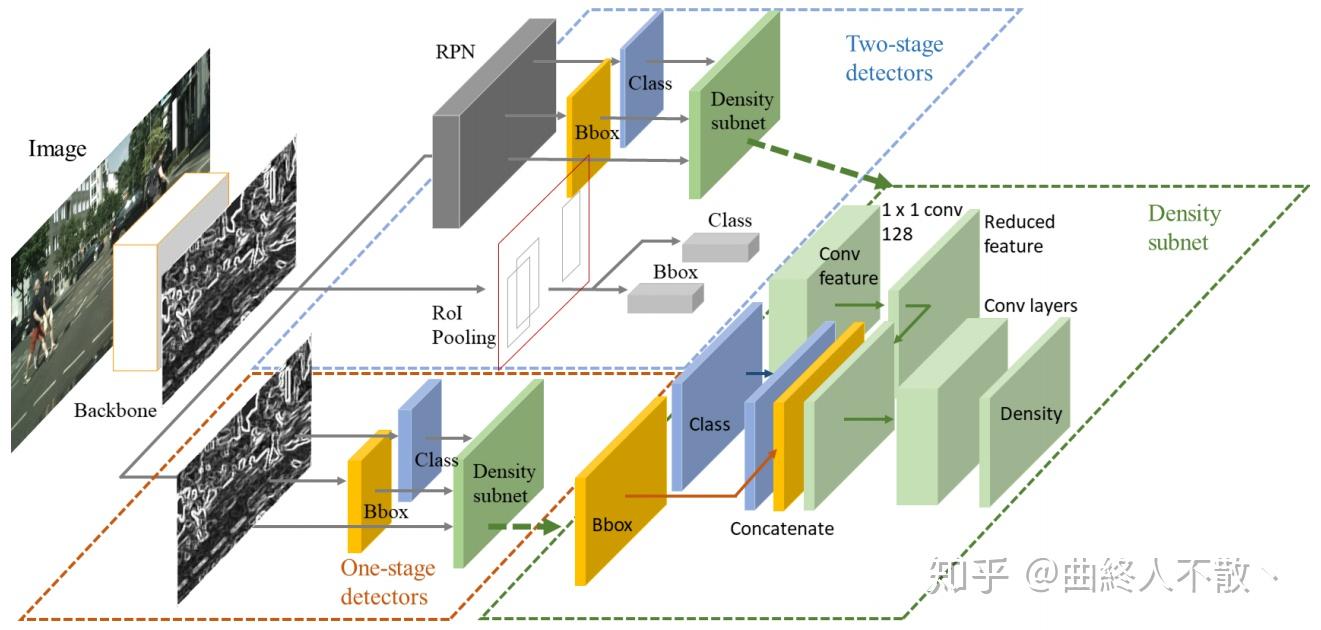
一个GT框 B_i 的密度标签定义如下,
d_i:=\max\limits_{B_i,B_j\in GT}IoU(B_i,B_j), \quad i\neq j
模型的输出将变为 (x,y,w,h,s,d) ,分别代表box坐标,宽高,分类得分,密度,其中密度 d 越大,代表该框所处的位置的物体分布越密集,越有可能是遮挡严重的地方;反之密度 d 越小,代表该框所处的位置的物体分布越稀疏,不太可能有遮挡。
论文以Traditionnal NMS和Soft-NMS的线性惩罚为基础,将每次迭代的NMS阈值更改如下:
N t = max { t h r e s h , d M } N_t=\max\{thresh, d_M\} Nt=max{thresh,dM}
其中 thresh 代表最小的NMS阈值。
优点:
- 可以与前面所述的各种NMS结合使用。
- 对遮挡案例更加友好。
缺点:
- 与Soft-NMS结合使用,效果可能倒退 (受低分检测框的影响)。
- 顺序处理模式,运算效率低。
- 需要额外添加密度预测模块,造成计算开销。
- 评判标准是IoU,即只考虑两个框的重叠面积,这对描述box重叠关系或许不够全面。
+中心点距离
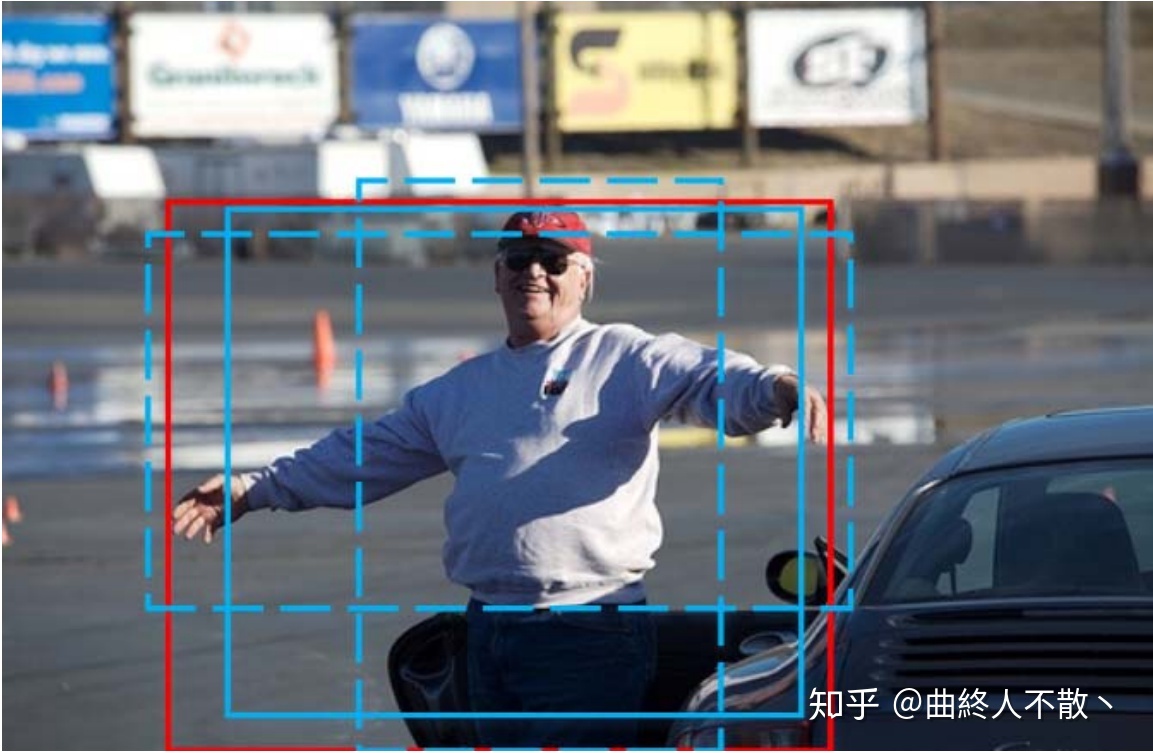
DIoU-NMS出现于Distance-IoU一文,研究者认为若相邻框的中心点越靠近当前最大得分框 M 的中心点,则其更有可能是冗余框。也就是说,考虑IoU相同的情况,如下所示
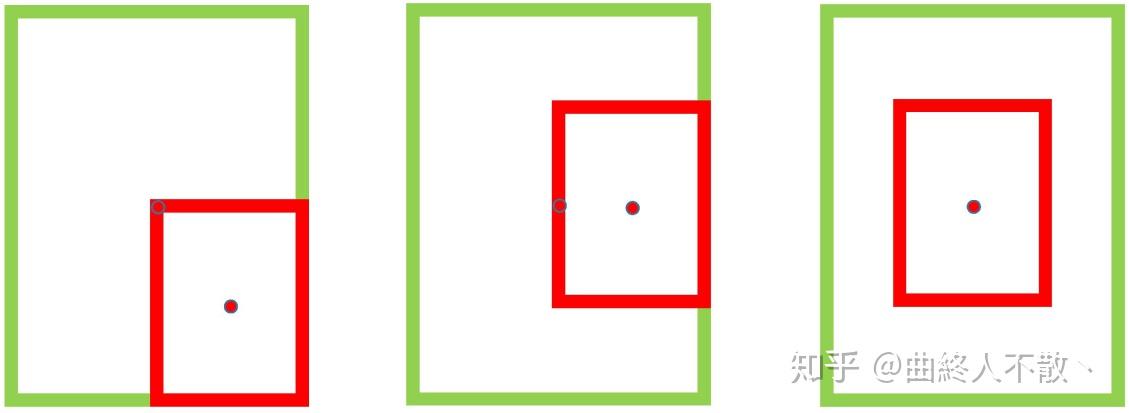
第一种相比于第三种越不太可能是冗余框。基于该观点,研究者使用所提出的DIoU替代IoU作为NMS的评判准则,公式如下:
s i = { 0 , D I o U ( M , B i ) ⩾ t h r e s h s i , D I o U ( M , B i ) < t h r e s h s_i=\left\{ \begin{array}{lc} 0, & DIoU(M,B_i)\geqslant thresh\\ s_i, & DIoU(M,B_i)<thresh\\ \end{array}\right. si={0,si,DIoU(M,Bi)⩾threshDIoU(M,Bi)<thresh
DIoU的定义为
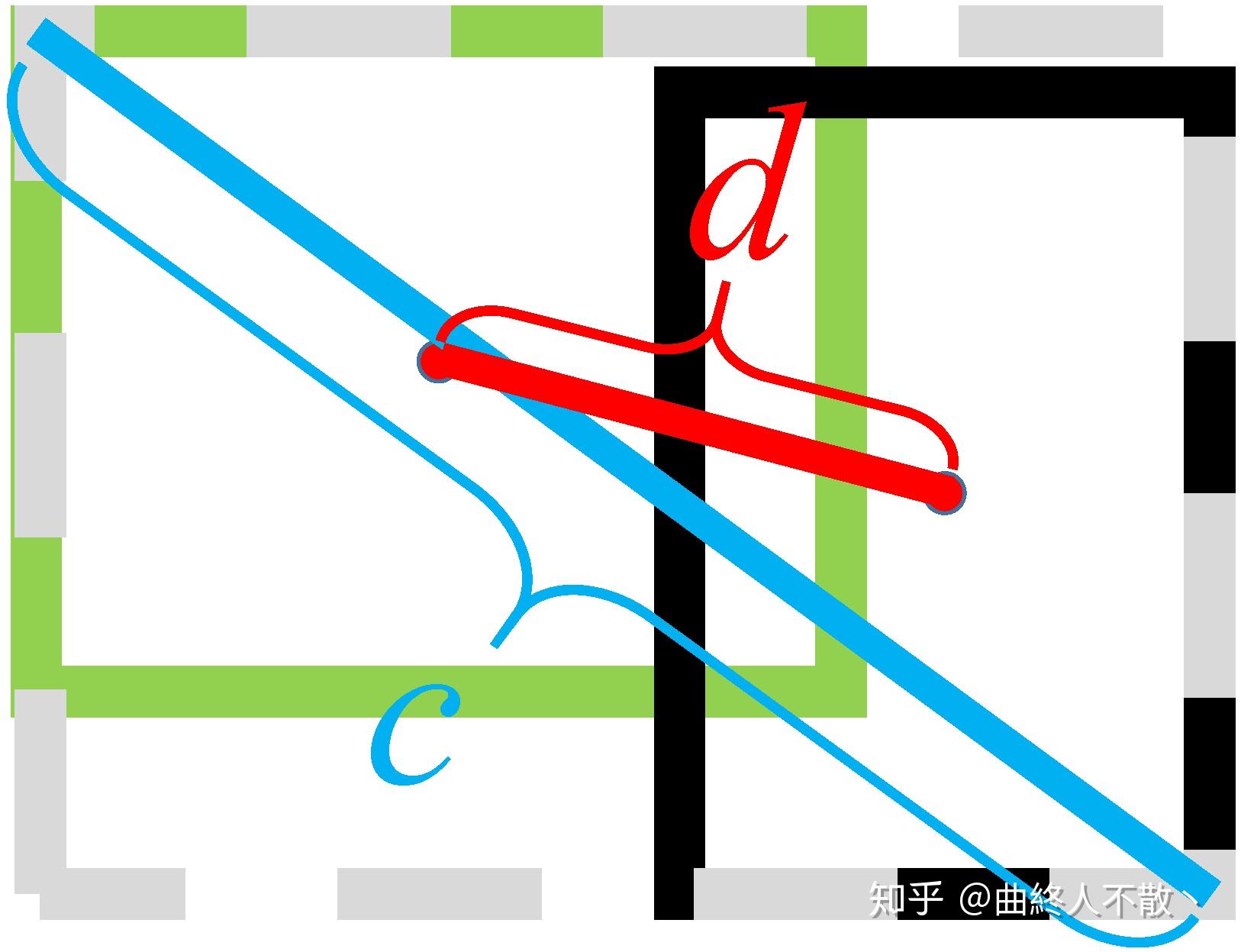
D I o U = I o U − d ² / c ² DIoU=IoU-d²/c² DIoU=IoU−d²/c²
而在实际操作中,研究者还引入了参数 \beta ,用于控制 \frac{d2}{c2} 的惩罚幅度。即
D I o U = I o U − ( d 2 c 2 ) β DIoU=IoU-(\frac{d^2}{c^2})^\beta DIoU=IoU−(c2d2)β
由公式可以看出,
- 当 β → ∞ \beta\rightarrow\infty β→∞ 时,DIoU退化为IoU,此时的DIoU-NMS与Traditional NMS效果相当。
- 当 β → 0 \beta\rightarrow0 β→0 时,此时几乎所有中心点不与 M 重合的框都被保留了。
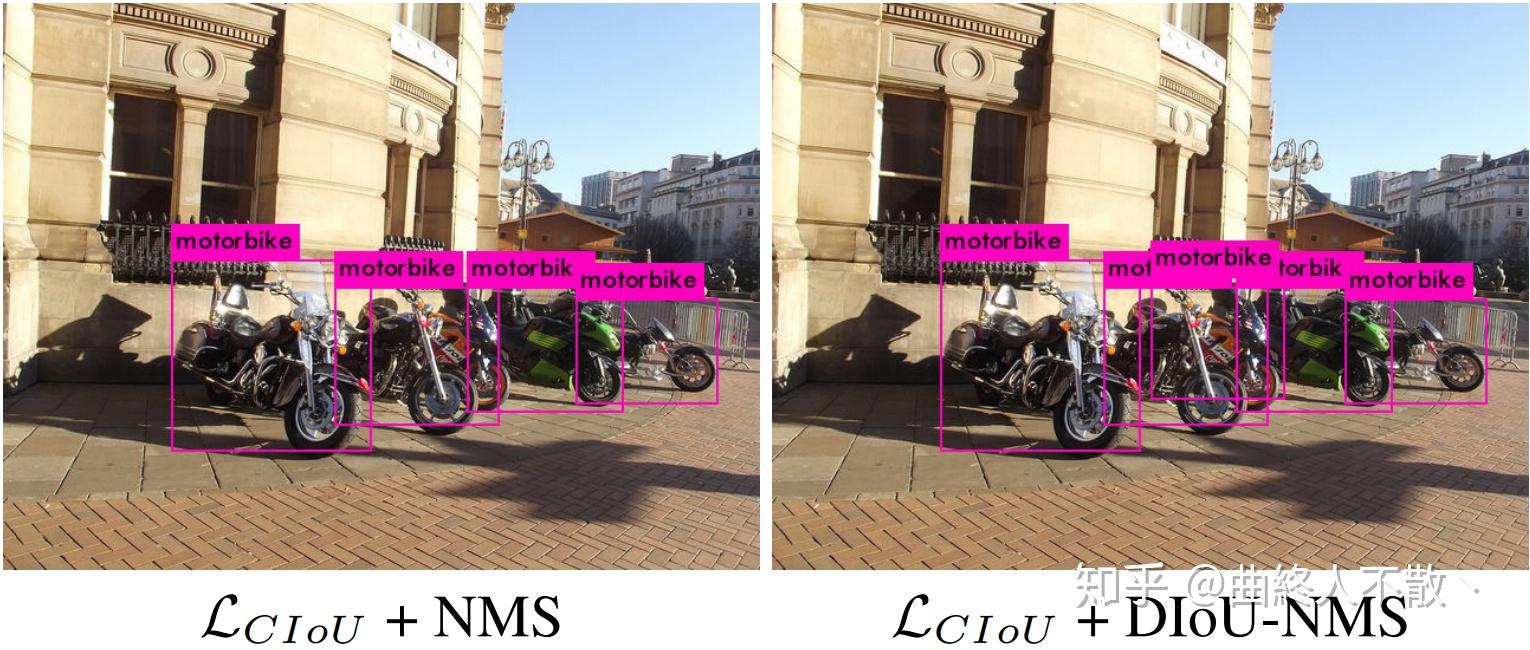
研究者进一步比较了Traditional NMS和DIoU-NMS的性能,在YOLOv3和SSD上,选取NMS阈值为[0.43,0.48]。可以看到DIoU-NMS在每个阈值上都优于Traditional NMS,此外还值得一提的是,即便是性能最差的DIoU-NMS也比性能最好的Traditional NMS相当或更优,说明即便不仔细调整NMS阈值,DIoU-NMS也通常能够表现更好。
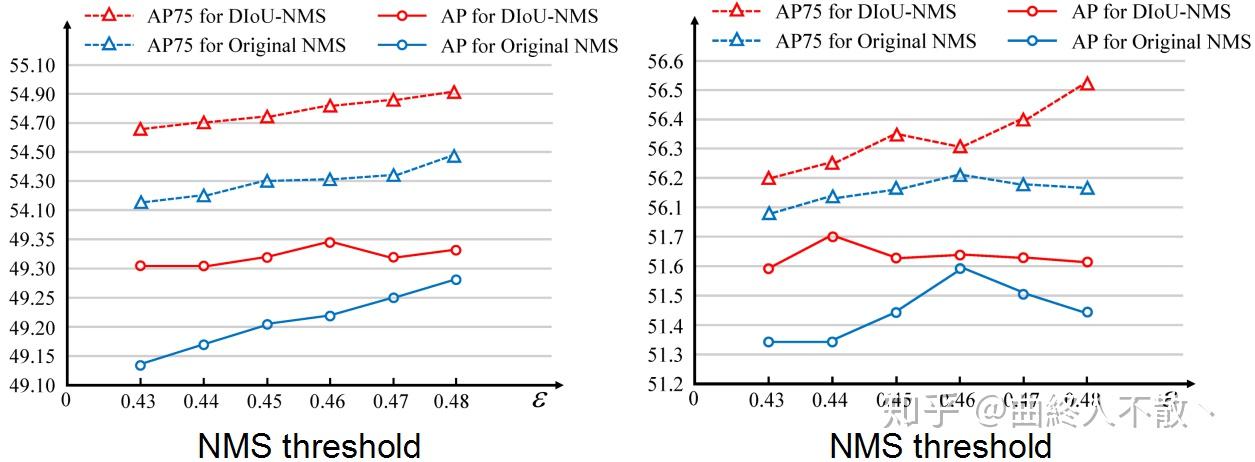
YOLOv3(左)和SSD(右)在VOC 2007 test集
这里顺便一提,既然都比了[0.43, 0.48]的阈值,就让人比较好奇更宽的阈值范围会怎样?Traditional NMS会不会有反超DIoU-NMS的情况?当然我个人比较认同DIoU-NMS更优的范围会大一些,也就是NMS阈值不必精调也可放心使用DIoU-NMS。
优点:
- 从几何直观的角度,将中心点考虑进来有助于缓解遮挡案例。
- 可以与前述NMS变体结合使用。
- 保持NMS阈值不变的情况下,必然能够获得更高recall (因为保留的框增多了),至于precision就需要调 \beta 来平衡了。
- 个人认为+中心点距离的后处理可以与DIoU/CIoU损失结合使用,这两个损失一方面优化IoU,一方面指引中心点的学习,而中心点距离学得越好,应该对这种后处理思想的执行越有利。
缺点:
- 依然是顺序处理模式,运算效率低。
- DIoU的计算比IoU更复杂一些,这会降低运算效率。
- 在保持NMS阈值不变的情况下,使用DIoU-NMS会导致每次迭代剩余更多的框,这会增加迭代轮数,进一步降低运算效率。(经本人实测,DIoU-NMS是Traditional NMS 起码1.5倍耗时)
总结:
- 加权平均法通常能够稳定获得精度与召回的提升。
- 定位优先法,方差加权平均法与自适应阈值法需要修改模型,不够灵活。
- 中心点距离法可作为额外惩罚因子与其他NMS变体结合。
- 得分惩罚法会改变box的得分,打破了模型校准机制。
- 运算效率的低下可能会限制它们的实时应用性。
效率提升
实际项目中,NMS往往能占模型计算总时间的40%甚至更多,极大影响了模型的效率。经过一段时间的调研,关于提升NMS运算速度的方法,在这里也将结合代码进行阶段性总结。
所参考的代码库列举如下:
- Faster RCNN pytorch (rbg大神) 的 CUDA NMS https://github.com/rbgirshick/py-faster-rcnn
- YOLACT团队提出的Fast NMS https://github.com/dbolya/yolact
- CIoU团队提出的Cluster NMS https://github.com/Zzh-tju/CIoU
- SOLOv2团队提出的Matrix NMS https://github.com/WXinlong/SOLO
- Torchvision封装的免编译CUDA NMS
加速的关键
在进入正题之前,首先我们应该考察一下NMS运算效率的瓶颈在哪?答案自然是IoU计算及顺序迭代抑制。
假如一张图片中有 n 个检测框,由于顺序处理的原因,某一个框与其他框计算IoU,最少一次,最多有 n-1 次。再加上顺序迭代抑制,NMS算法在计算IoU方面,共需要计算IoU至少 n-1 次,最多 ( n − 1 ) + ( n − 2 ) + ⋯ + 1 = 1 2 n 2 − n 2 (n-1)+(n-2)+\cdots+1=\frac{1}{2}n^2-\frac{n}{2} (n−1)+(n−2)+⋯+1=21n2−2n 次。
因此,要想加速NMS,首当其冲应该要将IoU的计算并行化。这个操作在我们使用IoU-based loss的时候就有,只需计算检测框集合 B={B_i}_{i=1,to,n} 与自身的IoU即可。检测框集合 B 事先会按照得分降序排列,也就是说 B_1 是最高得分框, B_n 是最低得分框。得到如下这个IoU矩阵:
X = I o U ( B , B ) = ( x 11 x 12 ⋯ x 1 n x 21 x 22 ⋯ x 2 n ⋮ ⋮ ⋱ ⋮ x n 1 x n 2 ⋯ x n n ) , x i j = I o U ( B i , B j ) X=IoU(B,B)=\left(\begin{array}{cccc} x_{11}&x_{12}&\cdots&x_{1n}\\ x_{21}&x_{22}&\cdots&x_{2n}\\ \vdots&\vdots&\ddots&\vdots\\ x_{n1}&x_{n2}&\cdots&x_{nn}\\ \end{array}\right),\quad x_{ij}=IoU(B_i, B_j) X=IoU(B,B)=⎝⎜⎜⎜⎛x11x21⋮xn1x12x22⋮xn2⋯⋯⋱⋯x1nx2n⋮xnn⎠⎟⎟⎟⎞,xij=IoU(Bi,Bj)
得益于GPU的并行计算,我们可以一次性得到IoU的全部计算结果。这一步就已经极大地解决了IoU计算繁琐又耗时的问题。代码如下:
def box_iou(boxes1, boxes2):
# https://github.com/pytorch/vision/blob/master/torchvision/ops/boxes.py
"""
Return intersection-over-union (Jaccard index) of boxes.
Both sets of boxes are expected to be in (x1, y1, x2, y2) format.
Arguments:
boxes1 (Tensor[N, 4])
boxes2 (Tensor[M, 4])
Returns:
iou (Tensor[N, M]): the NxM matrix containing the pairwise
IoU values for every element in boxes1 and boxes2
"""
def box_area(box):
# box = 4xn
return (box[2] - box[0]) * (box[3] - box[1])
area1 = box_area(boxes1.t())
area2 = box_area(boxes2.t())
lt = torch.max(boxes1[:, None, :2], boxes2[:, :2]) # [N,M,2]
rb = torch.min(boxes1[:, None, 2:], boxes2[:, 2:]) # [N,M,2]
inter = (rb - lt).clamp(min=0).prod(2) # [N,M]
return inter / (area1[:, None] + area2 - inter) # iou = inter / (area1 + area2 - inter)
到这里为止,以上列出的5种NMS都可以做到,从速度上来说CUDA NMS和torchvision NMS相对底层,编译后使用,速度稍快,但必然损失了一些灵活度,后面会讲。(关于CUDA NMS的教程,有兴趣的小伙伴可以参考faster-rcnn源码阅读:nms的CUDA编程,非常详实。
在有了IoU矩阵之后,接下来就是应该要如何利用它来抑制冗余框。
IoU矩阵的妙用
以下列举的三篇文献,可谓是将IoU矩阵玩出了花,从不同的角度发扬光大,在NMS加速方面也确实走在正轨上。(所用的一些符号,笔者进行了统一)
Fast NMS
Fast NMS是《YOLACT: Real-time Instance Segmentation》一文的其中一个创新点。由于IoU的对称性,即 IoU(B_i,B_j)=IoU(B_j,B_i) ,看出 X 是一个对称矩阵。再加上一个框自己与自己算IoU也是无意义的,因此Fast NMS首先对 X 使用pytorch的triu函数进行上三角化,得到了一个对角线元素及下三角元素都为0的IoU矩阵 X 。
X = ( 0 x 12 x 13 ⋯ x 1 n 0 0 x 23 ⋯ x 2 n 0 0 0 ⋯ x 3 n ⋮ ⋮ ⋮ ⋱ ⋮ 0 0 0 ⋯ 0 ) X=\left(\begin{array}{ccccc} 0&x_{12}&x_{13}&\cdots&x_{1n}\\ 0&0&x_{23}&\cdots&x_{2n}\\ 0&0&0&\cdots&x_{3n}\\ \vdots&\vdots&\vdots&\ddots&\vdots\\ 0&0&0&\cdots&0\\ \end{array}\right) X=⎝⎜⎜⎜⎜⎜⎛000⋮0x1200⋮0x13x230⋮0⋯⋯⋯⋱⋯x1nx2nx3n⋮0⎠⎟⎟⎟⎟⎟⎞
接着对 X 执行按列取最大值操作,得到一维张量 $b=[b_1,b_2,\cdots,b_n], b_i $代表了 X 的第 i 列上元素的最大值。最后使用NMS阈值,论文取0.5,对 b 二值化。 b 中元素小于NMS阈值的是保留的框,≥NMS阈值的是冗余框。例如
1 0 1 0 0 ↑ N M S 阈 值 二 值 化 b = 0 0.6 0.2 0.72 0.8 ↑ 列 最 大 值 X = ( 0 0.6 0.1 0.3 0.8 0 0.2 0.72 0.1 0 0.45 0.12 0 0.28 0 ) \begin{array}{cccccc} &\;\;1\;\quad\;0\;\;\;\quad1\;\;\;\quad0\;\;\;\quad0\;\;\;\;\;\\ &\quad\quad\quad\quad\;\;\quad\quad\quad\quad\uparrow\;NMS阈值二值化\quad\\ b=&0\quad0.6\quad0.2\quad0.72\quad\,0.8\;\\ &\quad\quad\quad\quad\quad\uparrow\;列最大值\quad\\ X=&\left(\begin{array}{ccccc} 0&0.6&0.1&0.3&0.8\\ &0&0.2&0.72&0.1\\ &&0&0.45&0.12\\ &&&0&0.28\\ &&&&0\\ \end{array}\right)\end{array} b=X=10100↑NMS阈值二值化00.60.20.720.8↑列最大值⎝⎜⎜⎜⎜⎛00.600.10.200.30.720.4500.80.10.120.280⎠⎟⎟⎟⎟⎞
1代表保留,0代表抑制。
代码如下:
def fast_nms(self, boxes, scores, NMS_threshold:float=0.5):
'''
Arguments:
boxes (Tensor[N, 4])
scores (Tensor[N, 1])
Returns:
Fast NMS results
'''
scores, idx = scores.sort(1, descending=True)
boxes = boxes[idx] # 对框按得分降序排列
iou = box_iou(boxes, boxes) # IoU矩阵
iou.triu_(diagonal=1) # 上三角化
keep = iou.max(dim=0)[0] < NMS_threshold # 列最大值向量,二值化
return boxes[keep], scores[keep]
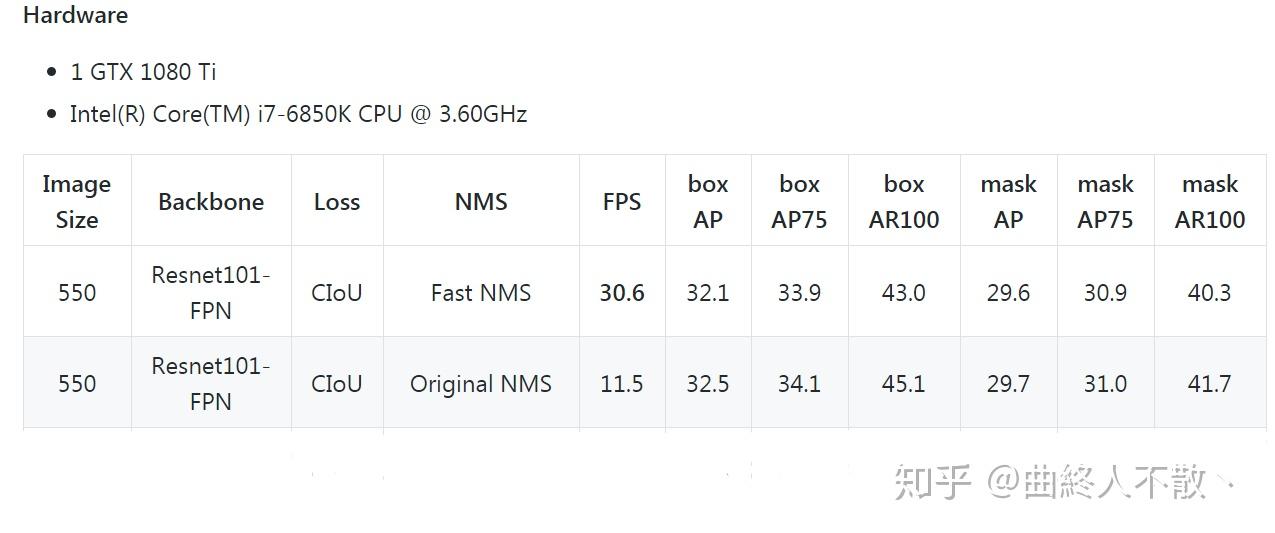
优点:
- 速度比cython编译加速的Traditional NMS快。(上表截自https://github.com/Zzh-tju/CIoU)
- 可支持与其他提升精度的NMS方法结合。
缺点:
- Fast NMS会比Traditional NMS抑制更多的框,性能略微下降。
- 比CUDA NMS慢,约0.2ms。
这里有必要解释一下,为什么Fast NMS会抑制更多的框?
我们知道NMS的思想是:当一个框是冗余框,被抑制后,将不会对其他框产生任何影响。但在Fast NMS中,如果一个框 B_i 的得分比 B_j 高,且 B_i 被抑制了,矩阵 X 的第 i 行正是 B_i 与得分低于它的所有框的IoU,如果 x_{ij} 这个元素≥NMS阈值的话,那么在取列最大值这个操作时, b 的第 j 个元素必然≥NMS阈值,于是很不幸地 B_j 就被抑制掉了。
也就是在刚刚的例子中,由于第二个框 B_2 被抑制,那么第二行第四列的0.72就不应该存在,可是Fast NMS允许冗余框去抑制其他框,导致了第四个框 B_4 被错误地抑制了。
1 0 1 0 0 ↑ N M S 阈 值 二 值 化 b = 0 0.6 0.2 0.72 0.8 ↑ 列 最 大 值 X = ( 0 0.6 0.1 0.3 0.8 0 0.2 0.72 0.1 0 0.45 0.12 0 0.28 0 ) \begin{array}{cccccc} &\;\;1\;\quad\;0\;\;\;\quad1\;\;\;\quad0\;\;\;\quad0\;\;\;\;\;\\ &\quad\quad\quad\quad\;\;\quad\quad\quad\quad\uparrow\;NMS阈值二值化\quad\\ b=&0\quad0.6\quad0.2\quad0.72\quad\,0.8\;\\ &\quad\quad\quad\quad\quad\uparrow\;列最大值\quad\\ X=&\left(\begin{array}{ccccc} 0&0.6&0.1&0.3&0.8\\ &0&0.2&0.72&0.1\\ &&0&0.45&0.12\\ &&&0&0.28\\ &&&&0\\ \end{array}\right)\end{array} b=X=10100↑NMS阈值二值化00.60.20.720.8↑列最大值⎝⎜⎜⎜⎜⎛00.600.10.200.30.720.4500.80.10.120.280⎠⎟⎟⎟⎟⎞
不过呢,YOLACT主要针对的是实例分割,mask是从box中裁剪出来的,Fast NMS对mask AP的下降比较轻微,约0.1~0.3的AP,但似乎对目标检测的box AP会下降更多。
Cluster NMS
Cluster NMS出自《Enhancing Geometric Factors in Model Learning and Inference for Object Detection and Instance Segmentation》一文。研究者主要旨在弥补Fast NMS的性能下降,期望也利用pytorch的GPU矩阵运算进行NMS,但同时又使得性能保持与Traditional NMS相同。
最开始看到这个名字时,笔者还以为是采取聚类的NMS,这不禁让人想起了今年2月的FeatureNMS。但后来仔细看了过后,发现这里的cluster的含义不一样。

以上是论文的原话,意思是说,cluster是一个框集合,若某一个框A属于这个cluster,则必有cluster中的框与A的IoU≥NMS阈值,且A不会与除这个cluster之外的框有IoU≥NMS阈值。举个简单的例子:
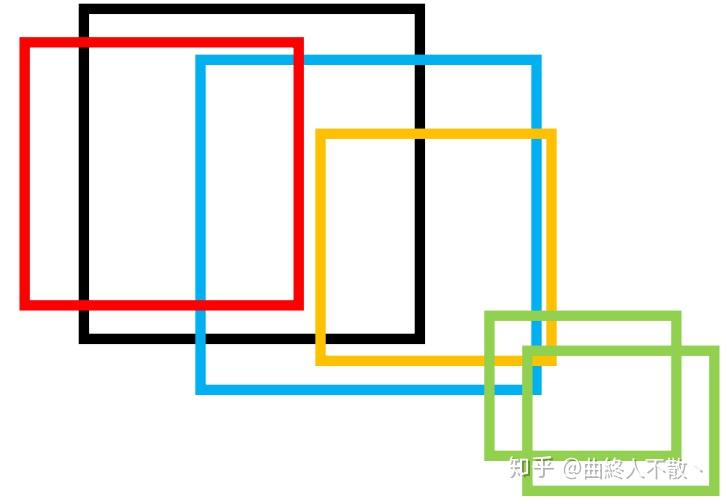
上图中的黑红蓝橙四个框构成一个cluster,而绿色的两个框构成一个cluster,虽然两个cluster之间有相交,但都没有超过NMS阈值,于是这两个框集合不能合并成一个cluster。
然后我们看一下Cluster NMS是怎么做的?
其实就是一个迭代式的Fast NMS。前面的过程与Fast NMS一模一样,都是 B 按得分降序排列,计算IoU矩阵,上三角化。然后按列取最大值,经过NMS阈值二值化得到一维张量 b 。但不同于Fast NMS直接输出了 b ,Cluster NMS而是利用 b ,将它展开成一个对角矩阵 E 。也就是这个对角矩阵 E 的对角线元素与 b 相同。然后用 E 去左乘IoU矩阵 X 。然后再按列取最大值,NMS阈值二值化得到一个新的一维张量 b,再展开成一个新的对角矩阵 E,继续左乘IoU矩阵 X 。直到出现某两次迭代后, b 保持不变了,那么谁该保留谁该抑制也就确定了。
这里借用一下作者在github的流程图。


以笔者的角度看,这种利用矩阵左乘的方式,其实就是在省略上一次Fast NMS迭代中被抑制的框对其他框的影响。
因为我们知道一个对角矩阵左乘一个矩阵,就是在做行变换啊,对应行是1,乘完的结果这一行保持不变,如果对应行是0,乘完的结果就是把这一行全部变成0。而 b 中某个元素若是0,就代表这个位置是冗余框,于是乘完之后,这个冗余框在下一次的迭代中就不再对其他框产生影响。为什么这里要强调下一次迭代?是因为这个迭代过程 b 会不断发生变动!可能某个框这会儿是冗余框,到了下一次迭代又变成了保留框。但是但是!到了最终 (其实未必是迭代满n次), b 就保持不变了!你说奇怪不?这里论文还给出了一个命题,说Cluster NMS的输出结果与Traditional NMS的结果一模一样。
论文里还给出了对这个命题的证明,又是数学数学数学!大致一看是利用数学归纳法证的,感兴趣的可以去看论文,这里请允许我跳过。
def cluster_nms(self, boxes, scores, NMS_threshold:float=0.5):
'''
Arguments:
boxes (Tensor[N, 4])
scores (Tensor[N, 1])
Returns:
Fast NMS results
'''
scores, idx = scores.sort(1, descending=True)
boxes = boxes[idx] # 对框按得分降序排列
iou = box_iou(boxes, boxes).triu_(diagonal=1) # IoU矩阵,上三角化
C = iou
for i in range(200):
A=C
maxA = A.max(dim=0)[0] # 列最大值向量
E = (maxA < NMS_threshold).float().unsqueeze(1).expand_as(A) # 对角矩阵E的替代
C = iou.mul(E) # 按元素相乘
if A.equal(C)==True: # 终止条件
break
keep = maxA < NMS_threshold # 列最大值向量,二值化
return boxes[keep], scores[keep]
好了,至此Cluster NMS算是完成了对Fast NMS性能下降的弥补。我们直接看结果好了
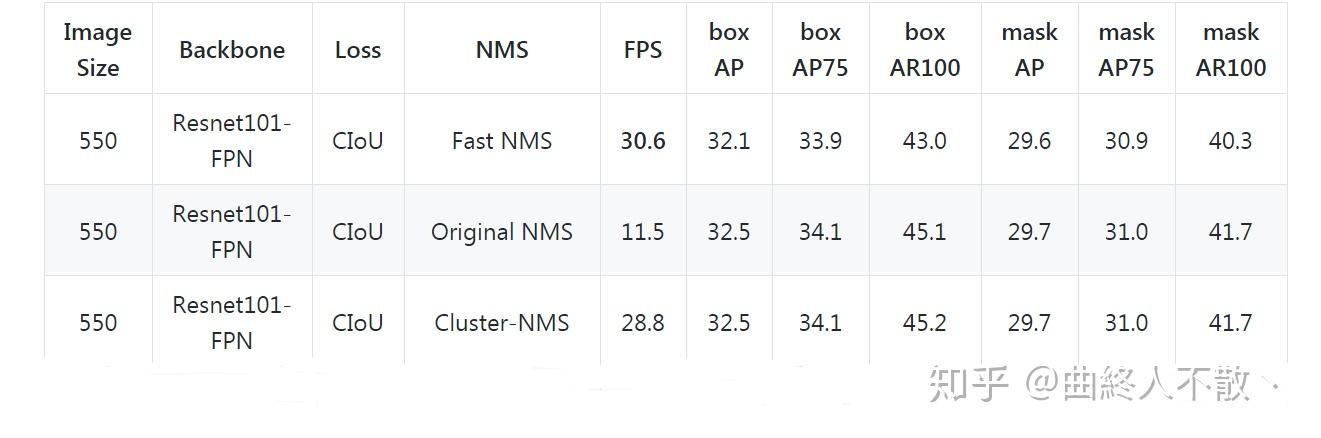
嗯,效果还是可以的,保持了AP与AR一样,运算效率比Fast NMS下降了一些,毕竟是迭代Fast NMS的操作,但也比Traditional NMS快多了。
以为这样就完了?接下来才是重头戏!
这里又分为两个部分,一个是实用上的,另一个是理论上的。先说一下实用上的。
之前说过基于pytorch的NMS方法灵活度要比CUDA NMS更高,就在于这些基于pytorch的NMS是高层语言编写,专为研究人员开发,矩阵运算清晰简洁,于是乎可以很方便地与一些能够提升精度的NMS方法结合!正所谓强强联合,于是就诞生出了又快又好的一系列Cluster NMS的变体。
论文里主要举了三种变体:
- 得分惩罚机制SPM(Score Penalty Mechanism)
s j = s j ∏ i e − C i j 2 σ s_j=s_j\prod\limits_ie^{-\frac{C_{ij}^2}{\sigma}} sj=sji∏e−σCij2
也就是对刚刚Cluster NMS终止后的矩阵 C=E\times X ,先做一个Soft-NMS里gaussian版的变换,然后将每一列上的元素连乘作为惩罚得分的系数。不过论文提到,虽然是叫得分惩罚机制,但又与Soft-NMS不同,因为这里的SPM不改变框的次序,再加上矩阵 C 是一个上三角矩阵的缘故,所以每个框都只会被得分高于它的框惩罚,并且这里已经排除了高得分的冗余框对它的惩罚。而Soft-NMS每次迭代惩罚得分后,需要重新按得分降序排列,所以框的次序会不断变动。
def SPM_cluster_nms(self, boxes, scores, NMS_threshold:float=0.5):
'''
Arguments:
boxes (Tensor[N, 4])
scores (Tensor[N, 1])
Returns:
Fast NMS results
'''
scores, idx = scores.sort(1, descending=True)
boxes = boxes[idx] # 对框按得分降序排列
iou = box_iou(boxes, boxes).triu_(diagonal=1) # IoU矩阵,上三角化
C = iou
for i in range(200):
A=C
maxA = A.max(dim=0)[0] # 列最大值向量
E = (maxA < NMS_threshold).float().unsqueeze(1).expand_as(A) # 对角矩阵E的替代
C = iou.mul(E) # 按元素相乘
if A.equal(C)==True: # 终止条件
break
scores = torch.prod(torch.exp(-C**2/0.2),0)*scores #惩罚得分
keep = scores > 0.01 #得分阈值筛选
return boxes[keep], scores[keep]
- +中心点距离
说到底DIoU就是该团队提出来的,那怎能不用上中心点距离呢?于是论文在两个方面添加了中心点距离。一个是IoU矩阵直接变成DIoU矩阵,由于DIoU也是满足尺度不变性的,所以完全没问题,相距很远的框之间的DIoU会变成负数,不过不影响过程。第二个是基于上面的SPM,公式如下:
s j = s j ∏ i min { e − C i j 2 σ + D β , 1 } s_j=s_j\prod\limits_i\min\{e^{-\frac{C_{ij}^2}{\sigma}}+D^\beta,1\} sj=sji∏min{e−σCij2+Dβ,1}
这里多添了一个 D 也就是DIoU loss的惩罚项,两框中心点距离²/最小包围矩形对角线长度²。 \beta 用于控制中心点距离惩罚的幅度。然后又与1相比较,取最小值,以避免惩罚因子大于1。
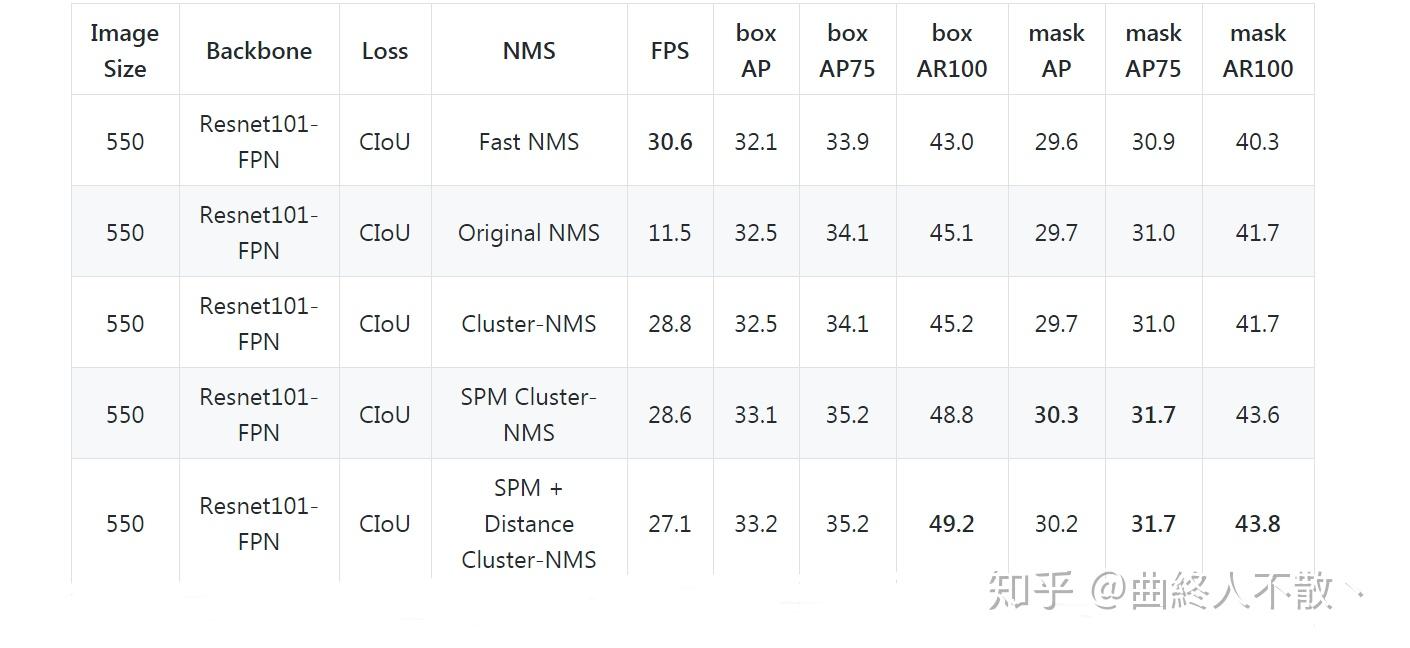
加了这两个变体之后,AP与AR得到了明显的改善,速度也是略微下降,很香
- 加权平均法Weighted NMS
也是利用矩阵 C ,先与得分张量 S = [ s 1 , s 2 , ⋯ , s n ] S=[s_1,s_2,\cdots,s_n] S=[s1,s2,⋯,sn] 按列相乘得到 C’ ,随后
B = C ′ × B B=C'\times B B=C′×B
就可以更新框的坐标了。
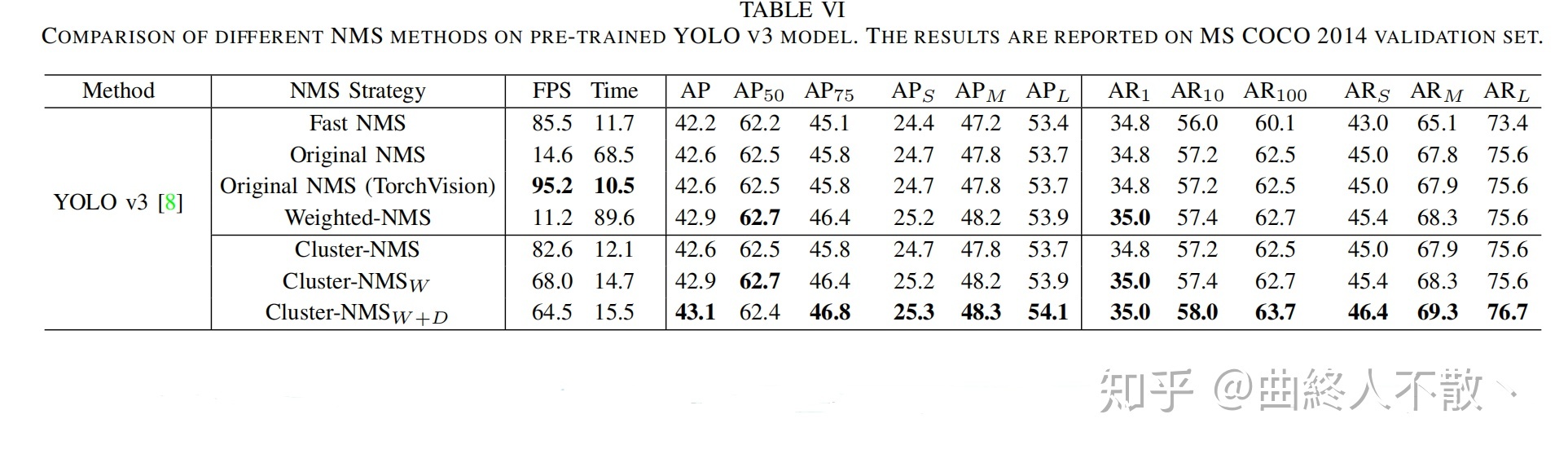
在YOLOv3上的效果有了不错的改进,虽然速度不及torchvision NMS,增加了5ms的运算成本,但结合Weighted NMS与DIoU,可以提升精度 (最后一行)。
def Weighted_cluster_nms(self, boxes, scores, NMS_threshold:float=0.5):
'''
Arguments:
boxes (Tensor[N, 4])
scores (Tensor[N, 1])
Returns:
Fast NMS results
'''
scores, idx = scores.sort(1, descending=True)
boxes = boxes[idx] # 对框按得分降序排列
iou = box_iou(boxes, boxes).triu_(diagonal=1) # IoU矩阵,上三角化
C = iou
for i in range(200):
A=C
maxA = A.max(dim=0)[0] # 列最大值向量
E = (maxA < NMS_threshold).float().unsqueeze(1).expand_as(A) # 对角矩阵E的替代
C = iou.mul(E) # 按元素相乘
if A.equal(C)==True: # 终止条件
break
keep = maxA < NMS_threshold # 列最大值向量,二值化
weights = (C*(C>NMS_threshold).float() + torch.eye(n).cuda()) * (scores.reshape((1,n)))
xx1 = boxes[:,0].expand(n,n)
yy1 = boxes[:,1].expand(n,n)
xx2 = boxes[:,2].expand(n,n)
yy2 = boxes[:,3].expand(n,n)
weightsum=weights.sum(dim=1) # 坐标加权平均
xx1 = (xx1*weights).sum(dim=1)/(weightsum)
yy1 = (yy1*weights).sum(dim=1)/(weightsum)
xx2 = (xx2*weights).sum(dim=1)/(weightsum)
yy2 = (yy2*weights).sum(dim=1)/(weightsum)
boxes = torch.stack([xx1, yy1, xx2, yy2], 1)
return boxes[keep], scores[keep]
接下来说一下Cluster NMS理论上的好处。
Cluster NMS的迭代次数通常少于Traditional NMS的迭代次数。
这一优点,从理论上给了它使用CUDA编程更进一步加速的可能。大致意思是说,平常我们在做NMS时,迭代都是顺序处理每一个cluster的。在Traditional NMS中,虽然不同的cluster之间本应毫无关系,但计算IoU重复计算了属于不同cluster之间的框,顺序迭代抑制的迭代次数也仍然保持不变。
但在Cluster NMS中,使用这种行变换的方式,就可以将本应在所有cluster上迭代,化简为只需在一个拥有框数量最多的cluster上迭代就够了(妙啊)。不同的cluster间享有相同的矩阵操作,且它们互不影响。这导致迭代次数最多不超过一张图中最大cluster所拥有的框的个数。也就是下面这种情形
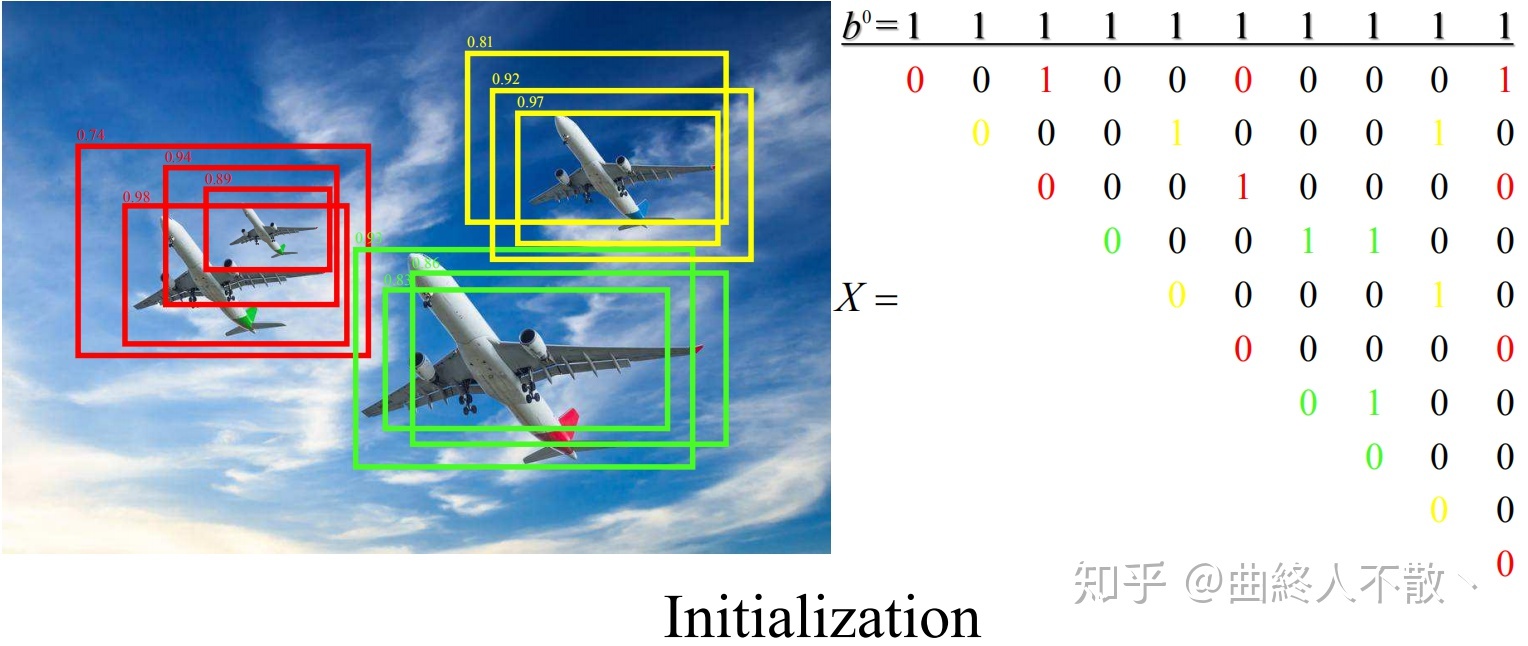
上图中共有10个检测框,分成了3个cluster,它的IoU矩阵(被NMS阈值二值化了)在右边。Cluster NMS做迭代的次数最多不超过4次,因为上图中框数量最多的那个cluster(红色)一共只有4个框。而实际上这张图使用Cluster NMS,只需迭代2轮便结束了。
因此这带来的好处是时间复杂度的下降。特别是对于一张图中有很多个cluster时,效果更为显著。比如这种情形,密密麻麻的狗狗

物体数量越多,到时候的检测框也就越多,形成的cluster必然也会增多,于是乎Cluster NMS这种对所有cluster并行处理的算法必然迭代次数非常少,不会随着物体的增多而过分地增加迭代轮数。最极端的情形是 n 个物体形成 n 个cluster,Traditional NMS需要迭代 \geqslant n 次,而Cluster NMS不与cluster数量有关,只与需要迭代次数最多的那一个cluster有关。这也是为什么文中说,有可能可以被进一步使用工程技巧加速的原因,比如底层CUDA实现。
优点:
- Cluster NMS可以保持与Traditional NMS一样的精度,速度快于Cython编译的Traditional NMS。
- 可以结合一些提升精度的方法,比如得分惩罚法,加权平均法,+中心点距离法。
- 并行处理cluster,给了算法迭代次数一个上界 (最大cluster的框数量)。
缺点:
- 速度上,各种变体Cluster NMS < Cluster NMS < Fast NMS < CUDA NMS
Matrix NMS
Matrix NMS出自《SOLOv2: Dynamic, Faster and Stronger》,也是利用排序过后的上三角化的IoU矩阵。不同在于它针对的是mask IoU。我们知道mask IoU的计算会比box IoU计算更耗时一些,特别是在Traditional NMS中,会加剧运算开销。因此Matrix NMS将mask IoU并行化是它最大的一个贡献。然后论文同样采取了得分惩罚机制来抑制冗余mask。具体代码如下:
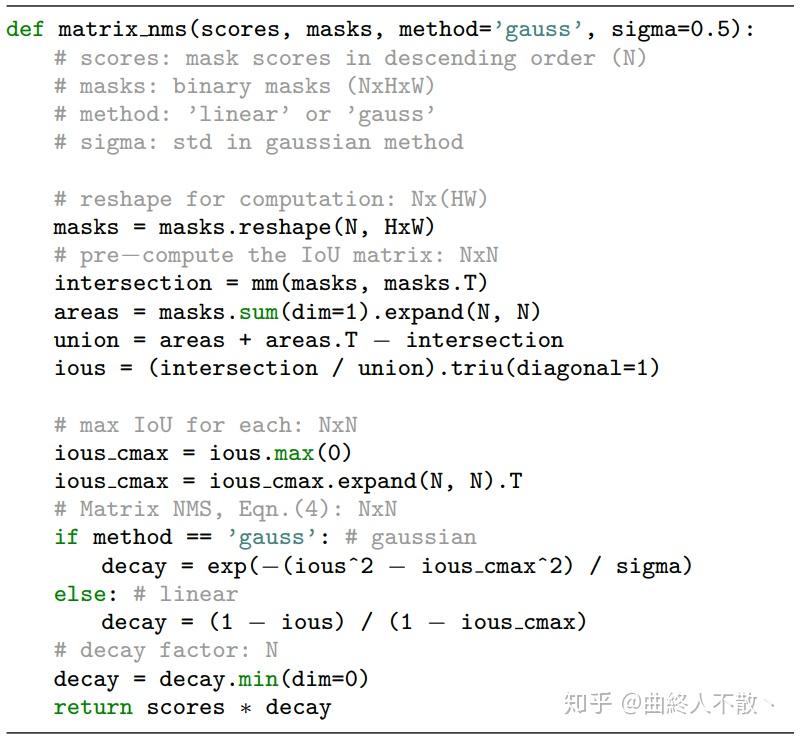
不过笔者在实现这个代码时遇到了问题,惩罚因子decay通常会≥1,在考虑一个mask B_j 的惩罚因子decay时,与两个东西有关,一个是所有得分高于它的mask与Bj的IoU,该IoU越大,惩罚应该更多(也就是上图中decay的分子);另一个是所有得分高于 B_j 的mask B_i 被抑制的概率(也就是上图中decay的分母),这是由 B_i 所处的这一列的最大IoU决定,越大则 B_i 越可能是冗余mask,就应该降低对 B_j 的惩罚力度。
随后decay取列最小值。但依据如上代码,decay通常会≥1,这会增大mask的得分,而代码又以0.05作为score筛选的阈值,说明应该是减少得分的思想没有错,这个矛盾导致得出的结果奇差无比。如有任何人知道Matrix NMS出现这种问题的原因,还请告知我问题在哪。
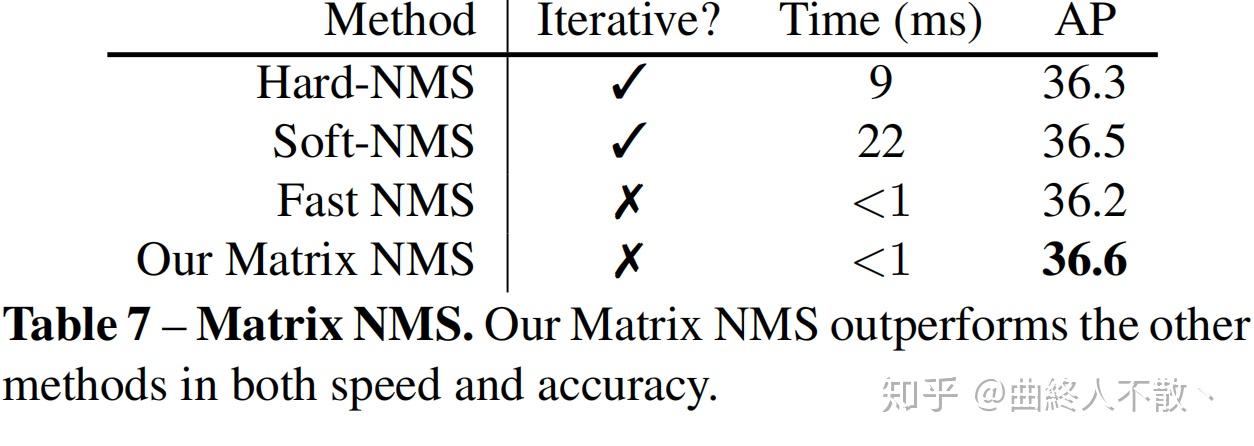
这里直接贴出论文结果,从这里似乎也看出了相比于Soft-NMS每次迭代重排序的做法,直接得分惩罚也是可取的。
优点:
- 实现了mask IoU的并行计算,对于box-free的密集预测实例分割模型很有使用价值。
- 与Fast NMS一样,只需一次迭代。
缺点:
- 与Fast NMS一样,直接从上三角IoU矩阵出发,可能造成过多抑制。
总结:
- CUDA NMS与Torchvision NMS稍快于以上三种基于pytorch实现的NMS,但比较死板,改动不易。
- Cluster NMS基本可以取代Fast NMS,且与其他提升精度的方法的有机结合,使它又快又好。(目前作者团队的代码库只提供了得分惩罚法,+中心点距离,加权平均法三种。)
- Matrix NMS也可以参考Cluster NMS的方式先得到一个与Traditional NMS一样的结果后,再进行后续处理。
- 三种基于pytorch的NMS方法,只依赖于矩阵操作,无需编译。
- 将2D检测的NMS加速方法推广至3D检测,应该也是很有价值的。
人知道Matrix NMS出现这种问题的原因,还请告知我问题在哪。
这里直接贴出论文结果,从这里似乎也看出了相比于Soft-NMS每次迭代重排序的做法,直接得分惩罚也是可取的。
[外链图片转存中…(img-bxfPeLLM-1700568414133)]
优点:
- 实现了mask IoU的并行计算,对于box-free的密集预测实例分割模型很有使用价值。
- 与Fast NMS一样,只需一次迭代。
缺点:
- 与Fast NMS一样,直接从上三角IoU矩阵出发,可能造成过多抑制。
总结:
- CUDA NMS与Torchvision NMS稍快于以上三种基于pytorch实现的NMS,但比较死板,改动不易。
- Cluster NMS基本可以取代Fast NMS,且与其他提升精度的方法的有机结合,使它又快又好。(目前作者团队的代码库只提供了得分惩罚法,+中心点距离,加权平均法三种。)
- Matrix NMS也可以参考Cluster NMS的方式先得到一个与Traditional NMS一样的结果后,再进行后续处理。
- 三种基于pytorch的NMS方法,只依赖于矩阵操作,无需编译。
- 将2D检测的NMS加速方法推广至3D检测,应该也是很有价值的。