✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab仿真内容点击👇
智能优化算法 神经网络预测 雷达通信 无线传感器
信号处理 图像处理 路径规划 元胞自动机 无人机 电力系统
⛄ 内容介绍
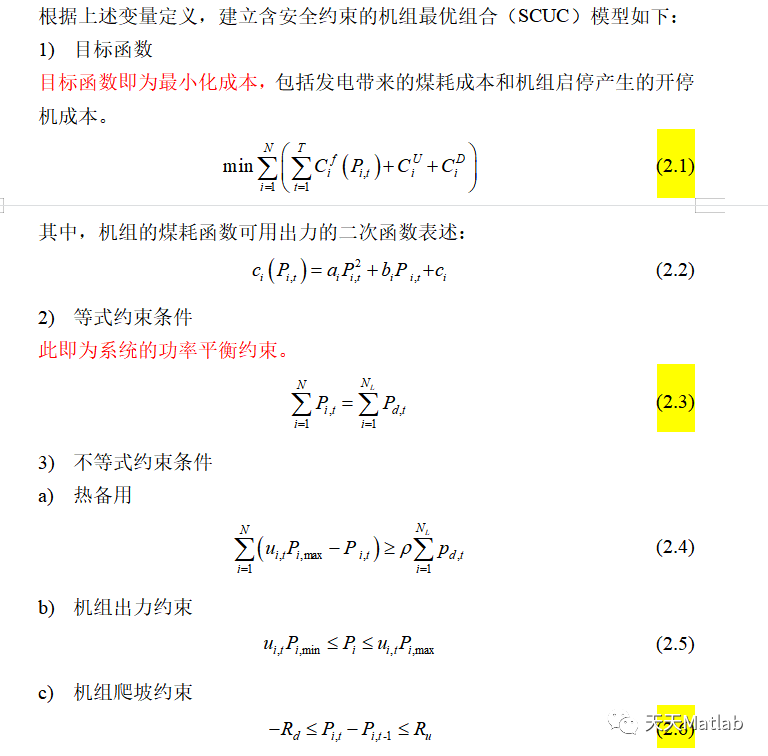
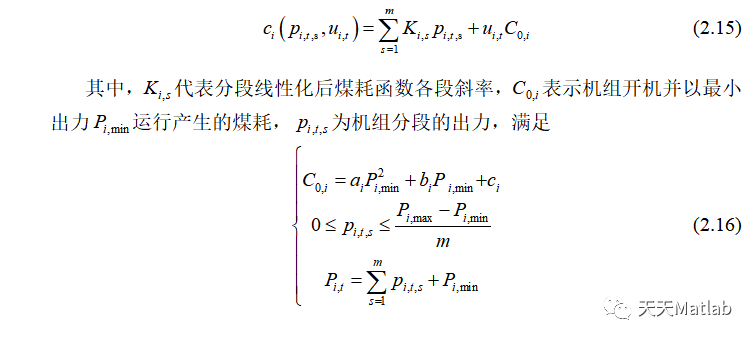
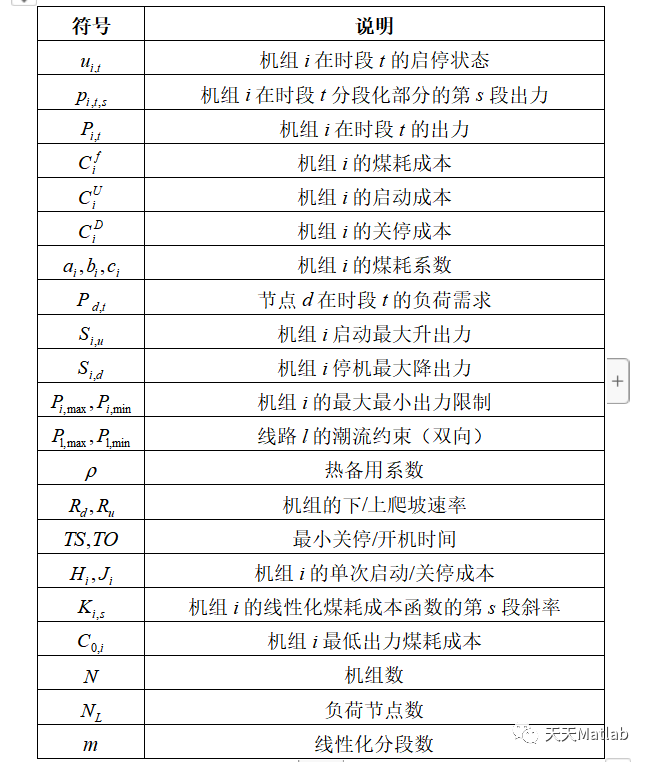
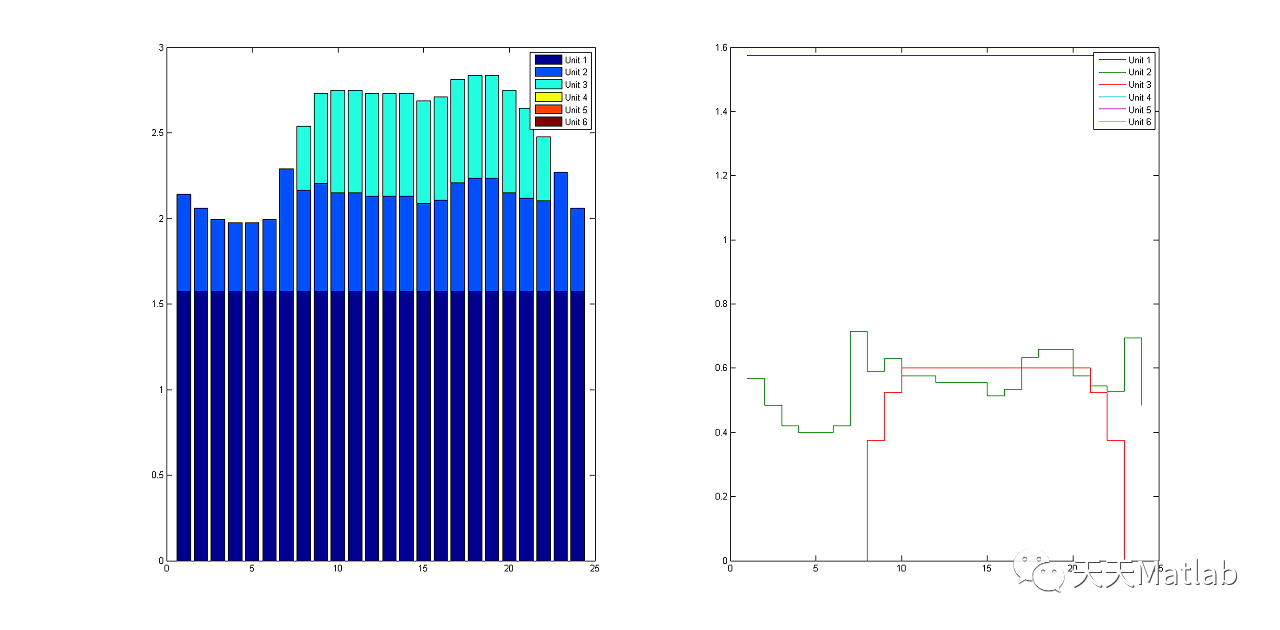
机组组合问题要求基于已知的系统数据,求解计划时间内机组决策变量的最优组合,使得系统总成本达到最小。该问题的决策变量由两类,一类是各时段机组的启停状态,为整数变量,0表示关停,1表示启动;另一类是各时段机组的出力,为连续变量。
机组组合问题属于规划问题,即要在决策变量的可行解空间里找到一组最优解,使得目标函数尽可能取得极值。对于混合整数规划,常用的方法有分支定界法,benders分解等。CPLEX提供了快速的MIP求解方法,对于数学模型已知的问题,只需要按照程序规范在MATLAB中编写程序化模型,调用CPLEX求解器,即可进行求解。
下文介绍机组组合优化的数学模型。

校验程序的算例基于IEEE-30节点标准测试系统,系统接线图如图1。系统包含30个节点,6台发电机组。要求确定系统最优机组组合,使得系统各机组总运行成本(煤耗成本+启停成本)最小化。

| 图1. IEEE-30节点测试系统接线 |
已知:给定系统数据包括如下:(见附件testsystem.xls)
1)线路网络参数
2)机组参数
3)各节点各时段负荷曲线(24小时)
注意:附件中的数据均基于标幺化系统得到,因此电力电量参数、网络参数等都为标幺值,无量纲。还要注意附件中煤耗系数a,b,c的单位为吨,因此计算煤耗成本还需换算为价格,设燃煤价格为100$/吨。
求解:机组组合结果,即机组各时段启停计划、机组各时段最优出力,以及内含的各时段的直流潮流等。
⛄ 部分代码
function diagnostic = solvesdp(varargin)
%SOLVESDP Computes solution to optimization problem
%
% DIAGNOSTIC = SOLVESDP(F,h,options) is the common command to
% solve optimization problems of the following kind
%
% min h
% subject to
% F >=(<=,==) 0
%
% NOTES
% Despite the name, SOLVESDP is the interface for solving all
% supported problem classes (LP, QP, SOCP, SDP, BMI, MILP, MIQP,...)
%
% To obtain solution for a variable, use DOUBLE.
%
% To obtain dual variable for a constraint, use DUAL.
%
% See YALMIPERROR for error codes returned in output.
%
% OUTPUT
% diagnostic : Diagnostic information
%
% INPUT
% F : Object describing the constraints. Can be [].
% h : SDPVAR object describing the objective h(x). Can be [].
% options : Options structure. See SDPSETTINGS. Can be [].
%
% EXAMPLE
% A = randn(15,5);b = rand(15,1)*5;c = randn(5,1);
% x = sdpvar(5,1);
% solvesdp([x>=0, A*x<=b],c'*x);double(x)
%
% See also DUAL, @SDPVAR/DOUBLE, SDPSETTINGS, YALMIPERROR
yalmiptime = clock; % Let us see how much time we spend
% Avoid warning
if length(varargin)>=2
if isa(varargin{2},'double')
varargin{2} = [];
end
end
if length(varargin)>=2
if isa(varargin{2},'sdpvar') && prod(size(varargin{2}))>1
% Several objectives
diagnostic = solvesdp_multiple(varargin{:});
return
end
end
% *********************************
% CHECK INPUT
% *********************************
nargin = length(varargin);
if nargin<1
help solvesdp
return
else
F = varargin{1};
if isa(F,'constraint')
F = lmi(F);
end
if isa(F,'lmi')
F = flatten(F);
end
if isa(F,'sdpvar')
% We do allow sloppy coding of logic constraints, i.e writing a
% constraints as [a|b true(a)]
Fnew = [];
for i = 1:length(F)
if length(getvariables(F(i)))>1
Fnew = nan;
break
end
operator = yalmip('extstruct',getvariables(F(i)));
if isempty(operator)
Fnew = nan;
break
end
if length(operator)>1
Fnew = nan;
break
end
if ~strcmp(operator.fcn,'or')
Fnew = nan;
break
end
Fnew = Fnew + (true(F(i)));
end
if isnan(Fnew)
error('First argument (F) should be a constraint object.');
else
F = Fnew;
end
elseif isempty(F)
F = lmi([]);
elseif ~isa(F,'lmi')
error('First argument (F) should be a constraint object.');
end
end
if nargin>=2
h = varargin{2};
if isa(h,'double')
h = [];
end
if ~(isempty(h) | isa(h,'sdpvar') | isa(h,'logdet') | isa(h,'ncvar'))
error('Second argument (the objective function h) should be an sdpvar or logdet object (or empty).');
end
if isa(h,'logdet')
logdetStruct.P = getP(h);
logdetStruct.gain = getgain(h);
h = getcx(h);
if isempty(F)
F = ([]);
end
else
logdetStruct = [];
end
else
logdetStruct = [];
h = [];
end
if ~isempty(F)
if any(is(F,'sos'))
diagnostic = solvesos(varargin{:});
return
end
end
if isa(h,'sdpvar')
if is(h,'complex')
error('Complex valued objective does not make sense.');
end
end
if nargin>=3
options = varargin{3};
if ~(isempty(options) | isa(options,'struct'))
error('Third argument (options) should be an sdpsettings struct (or empty).');
end
if isempty(options)
options = sdpsettings;
end
else
options = sdpsettings;
end
options.solver = lower(options.solver);
% If user has logdet term, but no preference on solver, we try to hook up
% with SDPT3 if possible.
if ~isempty(logdetStruct)
if strcmp(options.solver,'')
% options.solver = 'sdpt3,*';
end
end
% Call chance solver?
if length(F) > 0
rand_declarations = is(F,'random');
if any(rand_declarations)
% diagnostic = solverandom(F(find(~rand_declarations)),h,options,recover(getvariables(sdpvar(F(find(unc_declarations))))));
return
end
end
% Call robust solver?
if length(F) > 0
unc_declarations = is(F,'uncertain');
if any(unc_declarations)
diagnostic = solverobust(F(find(~unc_declarations)),h,options,recover(getvariables(sdpvar(F(find(unc_declarations))))));
return
end
end
if isequal(options.solver,'mpt') | nargin>=4
solving_parametric = 1;
else
solving_parametric = 0;
end
% Just for safety
if isempty(F) & isempty(logdetStruct)
F = lmi;
end
if any(is(F,'sos'))
error('You have SOS constraints. Perhaps you meant to call SOLVESOS.');
end
% Super stupido
if length(F) == 0 & isempty(h) & isempty(logdetStruct)
diagnostic.yalmiptime = 0;
diagnostic.solvertime = 0;
diagnostic.info = 'No problems detected (YALMIP)';
diagnostic.problem = 0;
diagnostic.dimacs = [NaN NaN NaN NaN NaN NaN];
return
end
% Dualize the problem?
if ~isempty(F)
if options.dualize == -1
sdp = find(is(F,'sdp'));
if ~isempty(sdp)
if all(is(F(sdp),'sdpcone'))
options.dualize = 1;
end
end
end
end
if options.dualize == 1
[Fd,objd,aux1,aux2,aux3,complexInfo] = dualize(F,h,[],[],[],options);
options.dualize = 0;
diagnostic = solvesdp(Fd,-objd,options);
if ~isempty(complexInfo)
for i = 1:length(complexInfo.replaced)
n = size(complexInfo.replaced{i},1);
re = 2*double(complexInfo.new{i}(1:n,1:n));
im = 2*double(complexInfo.new{i}(1:n,n+1:end));
im=triu((im-im')/2)-(triu((im-im')/2))';
assign(complexInfo.replaced{i},re + sqrt(-1)*im);
end
end
return
end
% ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
% DID WE SELECT THE MOMENT SOLVER
% ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
if isequal(options.solver,'moment')
if ~isempty(logdetStruct)
error('Cannot dualize problems with logaritmic objective')
end
options.solver = options.moment.solver;
[diagnostic,x,momentdata] = solvemoment(F,h,options,options.moment.order);
diagnostic.momentdata = momentdata;
diagnostic.xoptimal = x;
return
end
% ******************************************
% COMPILE IN GENERALIZED YALMIP FORMAT
% ******************************************
[interfacedata,recoverdata,solver,diagnostic,F,Fremoved,ForiginalQuadratics] = compileinterfacedata(F,[],logdetStruct,h,options,0,solving_parametric);
% ******************************************
% FAILURE?
% ******************************************
if ~isempty(diagnostic)
diagnostic.yalmiptime = etime(clock,yalmiptime);
return
end
% ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
% DID WE SELECT THE LMILAB SOLVER WITH A KYP
% ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
if strcmpi(solver.tag,'lmilab') & any(is(F,'kyp'))
[diagnostic,failed] = calllmilabstructure(F,h,options);
if ~failed % Did this problem pass (otherwise solve using unstructured call)
diagnostic.yalmiptime = etime(clock,yalmiptime)-diagnostic.solvertime;
return
end
end
% ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
% DID WE SELECT THE KYPD SOLVER
% ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
if strcmpi(solver.tag,'kypd')
diagnostic = callkypd(F,h,options);
diagnostic.yalmiptime = etime(clock,yalmiptime)-diagnostic.solvertime;
return
end
% ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
% DID WE SELECT THE STRUL SOLVER
% ^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^^
if strfind(solver.tag,'STRUL')
diagnostic = callstrul(F,h,options);
diagnostic.yalmiptime = etime(clock,yalmiptime)-diagnostic.solvertime;
return
end
% ******************************************
% DID WE SELECT THE BMILIN SOLVER (obsolete)
% ******************************************
if strcmpi(solver.tag,'bmilin')
diagnostic = callbmilin(F,h,options);
return
end
% ******************************************
% DID WE SELECT THE BMIALT SOLVER (obsolete)
% ******************************************
if strcmp(solver.tag,'bmialt')
diagnostic = callbmialt(F,h,options);
return
end
%******************************************
% DID WE SELECT THE MPT solver (backwards comb)
%******************************************
actually_save_output = interfacedata.options.savesolveroutput;
if strcmpi(solver.tag,'mpt-2') | strcmpi(solver.tag,'mpt-3') | strcmpi(solver.tag,'mpcvx') | strcmpi(solver.tag,'mplcp')
interfacedata.options.savesolveroutput = 1;
if isempty(interfacedata.parametric_variables)
if (nargin < 4 | ~isa(varargin{4},'sdpvar'))
error('You must specify parametric variables.')
else
interfacedata.parametric_variables = [];
for i = 1:length(varargin{4})
interfacedata.parametric_variables = [interfacedata.parametric_variables;find(ismember(recoverdata.used_variables,getvariables(varargin{4}(i))))];
end
if isempty(varargin{5})
interfacedata.requested_variables = [];
else
interfacedata.requested_variables = [];
for i = 1:length(varargin{5})
interfacedata.requested_variables = [interfacedata.requested_variables;find(ismember(recoverdata.used_variables,getvariables(varargin{5}(i))))];
end
end
end
end
end
% *************************************************************************
% Just return the YALMIP model. Used when solving multiple objectives
% *************************************************************************
if isfield(options,'pureexport')
interfacedata.recoverdata = recoverdata;
diagnostic = interfacedata;
return
end
% *************************************************************************
% TRY TO SOLVE PROBLEM
% *************************************************************************
if options.debug
eval(['output = ' solver.call '(interfacedata);']);
else
try
eval(['output = ' solver.call '(interfacedata);']);
catch
output.Primal = zeros(length(interfacedata.c),1)+NaN;
output.Dual = [];
output.Slack = [];
output.solvertime = nan;
output.solverinput = [];
output.solveroutput = [];
output.problem = 9;
output.infostr = yalmiperror(output.problem,lasterr);
end
end
if options.dimacs
try
b = -interfacedata.c;
c = interfacedata.F_struc(:,1);
A = -interfacedata.F_struc(:,2:end)';
x = output.Dual;
y = output.Primal;
% FIX this nonlinear crap (return variable type in
% compileinterfacedata)
if options.relax == 0 & any(full(sum(interfacedata.monomtable,2)~=0))
if ~isempty(find(sum(interfacedata.monomtable | interfacedata.monomtable,2)>1))
z=real(exp(interfacedata.monomtable*log(y+eps)));
y = z;
end
end
if isfield(output,'Slack')
s = output.Slack;
else
s = [];
end
dimacs = computedimacs(b,c,A,x,y,s,interfacedata.K);
catch
dimacs = [nan nan nan nan nan nan];
end
else
dimacs = [nan nan nan nan nan nan];
end
% ********************************
% ORIGINAL COORDINATES
% ********************************
output.Primal = recoverdata.x_equ+recoverdata.H*output.Primal;
% ********************************
% OUTPUT
% ********************************
diagnostic.yalmiptime = etime(clock,yalmiptime)-output.solvertime;
diagnostic.solvertime = output.solvertime;
try
diagnostic.info = output.infostr;
catch
diagnostic.info = yalmiperror(output.problem,solver.tag);
end
diagnostic.problem = output.problem;
if options.dimacs
diagnostic.dimacs = dimacs;
end
% Some more info is saved internally
solution_internal = diagnostic;
solution_internal.variables = recoverdata.used_variables(:);
solution_internal.optvar = output.Primal;
if ~isempty(interfacedata.parametric_variables)
diagnostic.mpsol = output.solveroutput;
options.savesolveroutput = actually_save_output;
end;
if interfacedata.options.savesolveroutput
diagnostic.solveroutput = output.solveroutput;
end
if interfacedata.options.savesolverinput
diagnostic.solverinput = output.solverinput;
end
if interfacedata.options.saveyalmipmodel
diagnostic.yalmipmodel = interfacedata;
end
if options.warning & warningon & isempty(findstr(diagnostic.info,'No problems detected'))
disp(['Warning: ' output.infostr]);
end
if ismember(output.problem,options.beeponproblem)
try
beep; % does not exist on all ML versions
catch
end
end
% And we are done! Save the result
if ~isempty(output.Primal)
if size(output.Primal,2)>1
for j = 1:size(output.Primal,2)
temp = solution_internal;
temp.optvar = temp.optvar(:,j);
yalmip('setsolution',temp,j);
end
else
yalmip('setsolution',solution_internal);
end
end
if interfacedata.options.saveduals & solver.dual
if isempty(interfacedata.Fremoved) | (nnz(interfacedata.Q)>0)
try
setduals(F,output.Dual,interfacedata.K);
catch
end
else
try
% Duals related to equality constraints/free variables
% have to be recovered b-A*x-Ht == 0
b = -interfacedata.oldc;
A = -interfacedata.oldF_struc(1+interfacedata.oldK.f:end,2:end)';
H = -interfacedata.oldF_struc(1:interfacedata.oldK.f,2:end)';
x = output.Dual;
b_equ = b-A*x;
newdual = H\b_equ;
setduals(interfacedata.Fremoved + F,[newdual;output.Dual],interfacedata.oldK);
catch
% this is a new feature...
disp('Dual recovery failed. Please report this issue.');
end
end
end
% Hack to recover original QCQP duals from gurobi
if strcmp(solver.tag,'GUROBI-GUROBI')
if length(ForiginalQuadratics) > 0
if isfield(output,'qcDual')
if length(output.qcDual) == length(ForiginalQuadratics)
Ktemp.l = length(output.qcDual);
Ktemp.f = 0;
Ktemp.q = 0;
Ktemp.s = 0;
Ktemp.r = 0;
setduals(ForiginalQuadratics,-output.qcDual,Ktemp);
end
end
end
end
function yesno = warningon
s = warning;
yesno = isequal(s,'on');
⛄ 运行结果
⛄ 参考文献
[1]程杉王贤宁冯毅煁王睿娟. 基于CPLEX与MATLAB的电动汽车充电站优化调度仿真系统[J]. 电网与清洁能源, 2018, 034(001):123-127,136.
❤️ 关注我领取海量matlab电子书和数学建模资料
❤️部分理论引用网络文献,若有侵权联系博主删除