专栏系列文章如下:
【视觉SLAM十四讲学习笔记】第一讲——SLAM介绍
【视觉SLAM十四讲学习笔记】第二讲——初识SLAM
本章将介绍视觉SLAM的基本问题之一:如何描述刚体在三维空间中的运动?
旋转矩阵
点、向量和坐标系
三维空间由3个轴组成,所以一个空间点的位置可以由3个坐标指定。而刚体,它不光有位置,还有自身的姿态。举个例子,相机也可以看成三维空间的刚体,于是位置是指相机在空间中的哪个地方,而姿态则是指相机的朝向,合起来称为位姿。
点: 点是空间中的基本元素,没有长度,没有体积。
向量: 把两个点连接起来,就构成了向量。向量可以看成从某点指向另一点的一个箭头。不要把向量与它的坐标两个概念混淆。一个向量是空间当中的一样东西,并不需要和若干个实数相关联的。只有当我们指定这个三维空间中的某个坐标系时,才可以谈论该向量在此坐标系下的坐标,也就是找到若干个实数对应这个向量。简单来讲:向量本身就是一个东西,如果把它放在一个坐标系中,这个向量才有了对应于这个坐标系的坐标。
用线性代数的知识来说,三维空间中的某个点的坐标也可以用线性空间R^3来描述。假设在这个线性空间内,有该空间的一组基 (或者说基底)(e1,e2,e3),(基就是张成这个空间的一组线性相关的向量)那么,任意向量a在这组基下就有一个坐标,这里 (a1,a2,a3)T 称为a在此基下的坐标。公式如下:

坐标的具体取值,一是和向量本身有关,二是和坐标系(基)的选取有关。坐标系通常由3个正交的坐标轴组成,非正交的很少见。通常使用右手系,给定x和y轴时,z 轴就可以通过右手法则由x × y定义出来。左手系的第3个轴与右手系的方向相反。
向量内积: 可以描述向量间的投影关系

其中<a,b>指向量a,b的夹角。
向量外积:
外积的结果是一个向量,它的方向垂直于这两个向量,大小为 |a||b|sin〈a,b〉,是两个向量张成的四边形的有向面积。

对于外积运算,我们引入∧符号,把a写成一个矩阵,事实上是一个反对称矩阵(Skew-symmetric matrix),反对称矩阵A满足AT = -A。你可以将∧记成一个反对称符号。这样就把外积a × b写成了矩阵与向量的乘法a∧b,把它变成了线性运算。这意味着任意向量都对应着唯一的一个反对称矩阵,反之亦然:

向量和加减法、内外积,即使在不谈论它们的坐标时也可以计算。例如,虽然内积在有坐标时,可以用两个向量的分量乘积之和表达,但是即使不知道它们的坐标时,也可以通过长度和夹角来计算二者的内积。所以两个向量的内积结果和坐标系的选取是无关的。
坐标系间的欧式变换
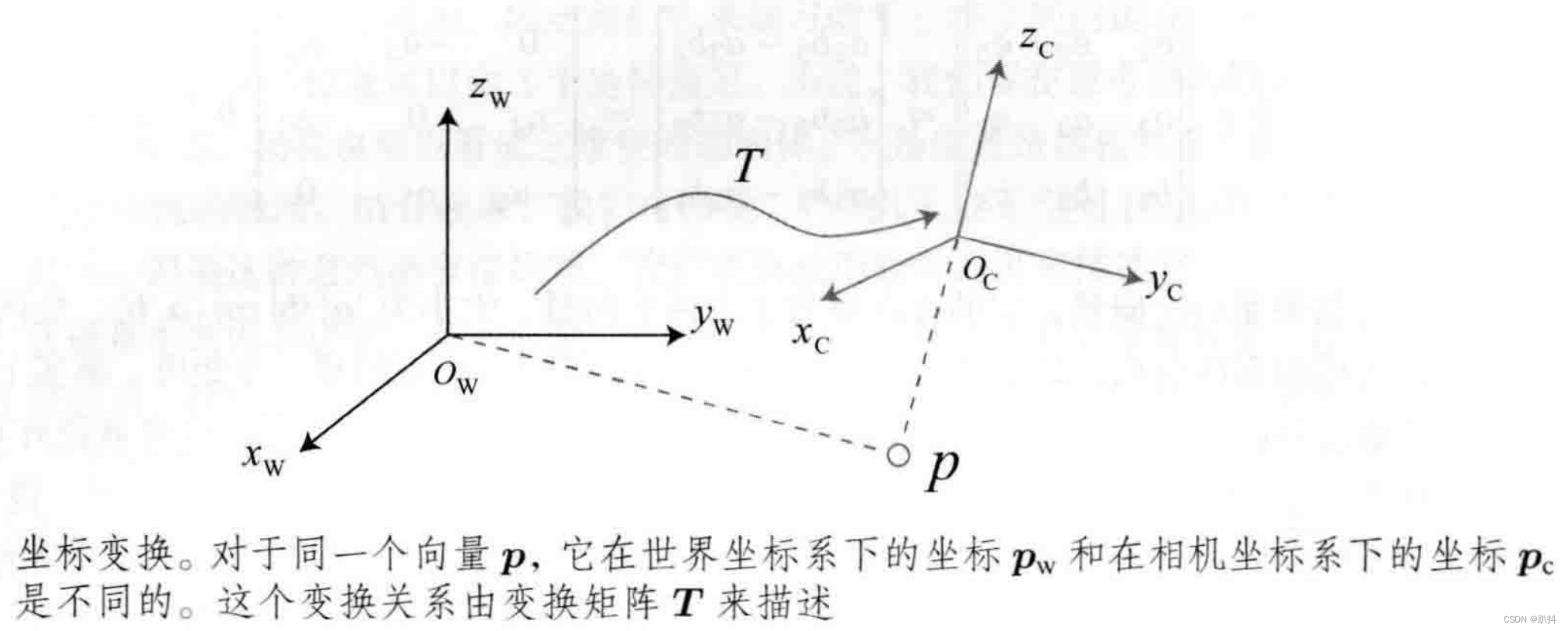
考虑运动的机器人,常见的做法是设定一个惯性坐标系(或者叫世界坐标系),可以认为它是固定不动的。相机或机器人则是一个移动坐标系。相机视野中某个向量p,它在相机坐标系下的坐标为pc,而在世界坐标系下看,它的坐标为pw。如果要实现这两个坐标之间的转换,需要先得到该点针对机器人坐标系的坐标值,再根据机器人位姿变换到世界坐标系中。我们需要一种数学手段来描述这个变换关系。
两个坐标系之间的运动由一个旋转加上一个平移组成,这种运动称为刚体运动。相机运动就是一个刚体运动。刚体运动过程中,同一个向量在各个坐标系下的长度和夹角都不会发生变化,只可能有空间位置和姿态的不同。此时,我们说刚体坐标系到世界坐标之间,相差了一个欧氏变换(Euclidean Transform)。
欧氏变换由旋转和平移组成。首先考虑旋转,设某个单位正交基 (e1, e2, e3) 经过一次旋转变成了 (e1’, e2’, e3’) ,那么,对于同一个向量 a(该向量并没有随着坐标系的旋转而发生运动),它在两个坐标系下的坐标为[a1, a2, a3]T和[a1’, a2’, a3’]T。因为向量本身没变,根据坐标的定义,有:

为了描述两个坐标之间的关系,我们对上述等式的左右两边同时左乘

那么左边的系数就变成了单位矩阵,把中间的矩阵拿出来,定义成一个矩阵R:
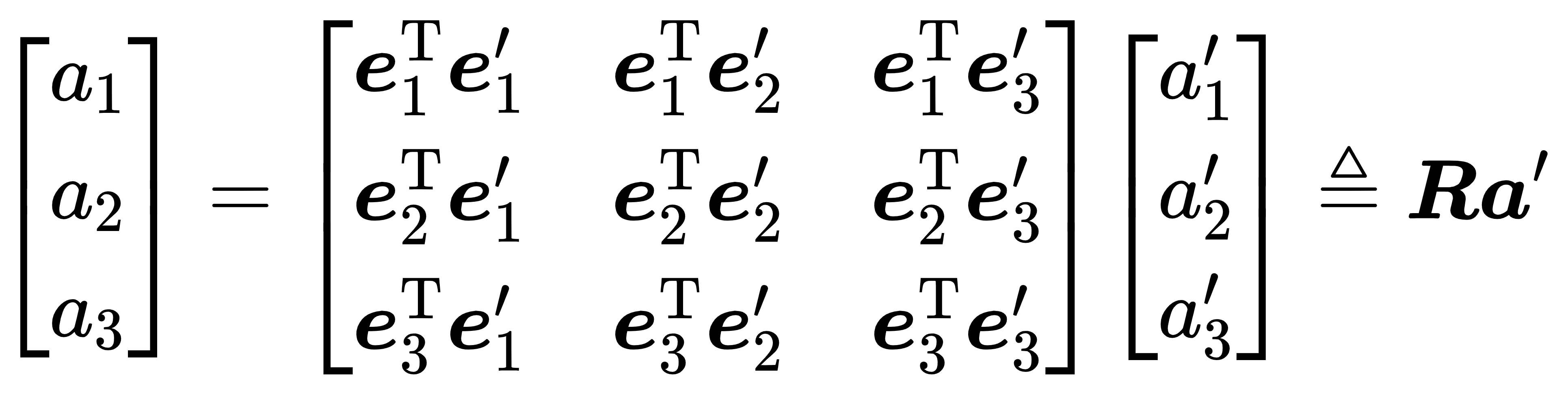
这个矩阵由两组基之间的内积组成,刻画了旋转前后同一个向量的坐标变换关系。只要旋转是一样的,那么这个矩阵也是一样的。可以说,矩阵R描述了旋转本身。因此称为旋转矩阵(Rotation matrix)。该矩阵各分量是两个坐标系基的内积,由于基向量的长度为1,所以实际上是各基向量的夹角之余弦。所以这个矩阵也叫方向余弦矩阵(Direction Cosine matrix)。
旋转矩阵有一些特别的性质。它是一个行列式为1的正交矩阵。反之,行列式为1的正交矩阵也是一个旋转矩阵。以把 n 维旋转矩阵的集合定义如下:

SO(n) 是特殊正交群(Special Orthogonal Group)的意思。这个集合由n维空间的旋转矩阵组成,特别地,SO(3) 就是指三维空间的旋转。通过旋转矩阵,我们可以直接谈论两个坐标系之间的旋转变换,而不用再从基开始谈起。
由于旋转矩阵为正交矩阵,它的逆(即转置)描述了一个相反的旋转:

在欧氏变换中,除了旋转之外还有平移。考虑世界坐标系中的向量a,经过一次旋转(用R描述)和一次平移t后,得到了a′,把旋转和平移合到一起,有:

t称为平移向量。平移部分只需把平移向量加到旋转之后的坐标上。
通过上式,我们用一个旋转矩阵R和一个平移向量t完整地描述了一个欧氏空间的坐标变换关系。定义坐标系1、坐标系2,那么向量a在两个系下坐标为 a1, a2,它们之间的关系应该是:

R12 是指把坐标系2的向量变换到坐标系1中。同理,如果我们要表达从1到2的旋转矩阵时,就写成R21。关于平移t12,实际对应的是坐标系1原点指向坐标系2原点的向量,在坐标系1下取的坐标,把它记作从1到2的向量。但是反过来的t21,即从2指向1的向量在坐标系2下的坐标,并不等于−t12,这里和两个系的旋转还有关系。从向量层面来看,它们确实是反向的关系,但这两个向量的坐标值并不是相反数。
变换矩阵与齐次坐标
上面的变换关系并非一个线性关系,一旦变换多次就会非常繁杂。所以我们引入齐次坐标和变换矩阵:

这是一个数学技巧:我们在一个三维向量的末尾添加 1,将其变成了四维向量,称为齐次坐标。对于这个四维向量,我们可以把旋转和平移写在一个矩阵里面,使得整个关系变成线性关系。该式中,矩阵T称为变换矩阵(Transform Matrix)。
我们暂时用ã表示a的齐次坐标。那么依靠齐次坐标和变换矩阵,两次变换的叠加就可以有很好的形式:

但是懒得区分齐次和非齐次的符号了,所以在不引起歧义的情况下,我们就直接把它写成b=Ta的样子,默认其中进行了齐次坐标的转换。要注意的是,不进行齐次坐标转换时,这边的乘法在矩阵维度上是不成立的。
变换矩阵T具有比较特别的结构:左上角为旋转矩阵,右侧为平移向量,左下角为0 向量,右下角为 1。这种矩阵又称为特殊欧氏群(Special Euclidean Group):

与 SO(3) 一样,求解该矩阵的逆表示一个反向的变换:

同样,我们用T12 这样的写法来表示从2到1的变换。
总结:
首先介绍了向量及其坐标表示,并介绍了向量间的运算;然后,坐标系之间的运动由欧氏变换描述,它由平移和旋转组成。旋转可以由旋转矩阵 SO(3) 描述,而平移直接由一个R^3向量描述。最后,如果将平移和旋转放在一个矩阵中,就形成了变换矩阵 SE(3)。