1.基于6次多项式的自动泊车轨迹算法研究
针对常见的自动泊车系统无法躲避障碍物,以及轨迹的曲率不连续等问题进行了泊车轨迹算法的研究以及跟踪算法的设计。
针对低速自动泊车场景进行分析,建立符合对应场景下的车辆运动学模型以及能够泊车的最小车位大小。针对运动学模型,进行泊车时约束条件分析,根据分析结果与车位大小进行泊车起始点与种植点边界条件的确定。
建立代表泊车轨迹的六次多项式,首先根据给定的起始与终止边界条件,将六次多项式的未知系数数量减少为1,然后将车辆与障碍物的碰撞作为约束,求解出未知系数的取值范围。最后,求解出使近似弧长最短的未知系数。在曲率和碰撞显示的系数范围内,取与之最为接近的系数作为六次多项式的最终系数,从而得到了对应的泊车轨迹。
忽略一些只有在车辆高速行驶时才影响较大的因素以及导致非正常行驶的因素,针对自动泊车的特点建立现实可行的车辆运动学模型,以便于下一步轨迹规划。
车辆自车的某些参数使影响泊车效果的重要因素。影响轨迹的车辆参数主要分为两类,第一类是外形大小相关的参数,有车辆长度、车辆宽度、车辆前悬、车辆后悬、车辆轴距等,这些参数制约着车辆的外形大小。
第二类是转向能力相关,主要有前轮最大转角、前轮角速度等。前轮转角越大车辆的转向能力越强,转的弯越小。
根据阿克曼转向原理,在行驶中的车辆前两个轮子可以等效看成一个轮子在运动,等效的前轮位于两前轮中轴线的中点。后轮也可等效,由此将四个轮子的现实车辆模型简化为两个轮子的等效自行车模型。
车辆在行驶过程中始终保持5kph的后轮速度。
在研究车辆运动时必须找到一个基准点,才能用坐标系表示车辆的轨迹,通常基准点有三个可能的选择,分别是后轮中心点,前轮中心点,整车中心点。
整车中心点可表示车辆的平均运动轨迹,但计算麻烦。后轮中心点优点则是轨迹的切线方向就是航向角方向,能够通过车轮后轮未知方便地计算前轮的位置。
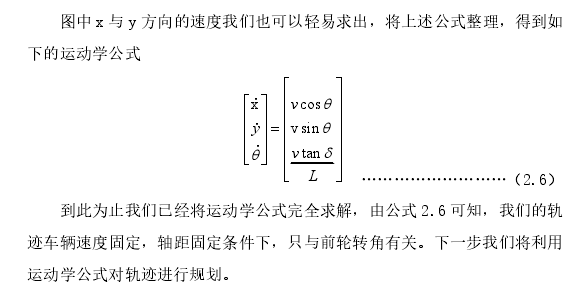
影响车辆轨迹的因素是速度、前轮转角和初始的车辆航向角。
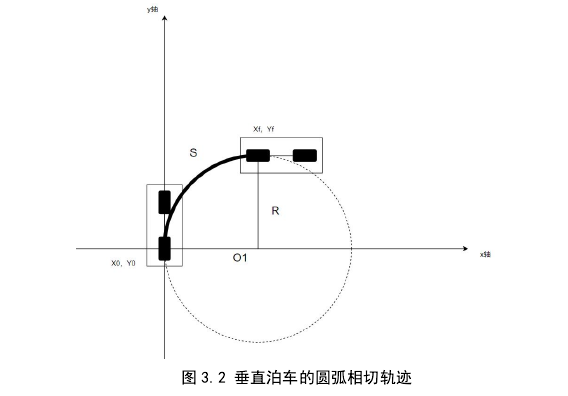
使用圆弧相切的轨迹计算需要的最小泊车位大小。
选用泊出的方式来代表整个泊车,泊车的轨迹统一制定为泊出的轨迹。
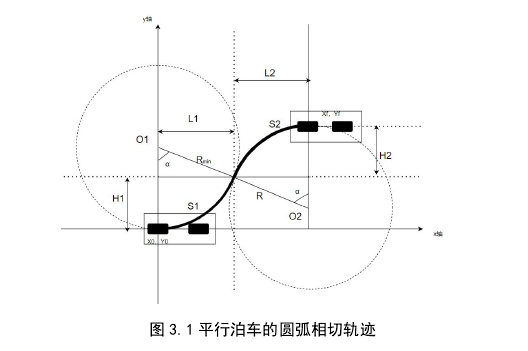
两个圆弧的半径大小等于车辆的最小转弯半径,这样的轨迹是车辆完全可以达到的,但是曲率发生了突变。
圆弧相切的轨迹虽然简单,可行性高,但是却有着中间停顿以及无法绕开障碍物的缺点,不适合作为目前智能车辆的泊车轨迹规划方法。
虽然圆弧相切泊车轨迹有着很多缺陷,却是分析最小泊车的最有效方法,两个相切的圆弧能够最大限度地减小车位的大小需求,想要车位最,那么车辆必须要转最小的弯,才能缩短横向车位距离,因此相切的两个圆弧使用的都是车辆的最小转弯半径作为半径。
想要泊车位最小,则以前右轮为半径的圆必须与车头方向的车位线刚好相接触,车辆擦着泊车泊出。
2. 基于超声波雷达的自动泊车系统研究
使用超声波雷达结合轮速传感器搭建了自动泊车系统的感知和定位算法进行了检测,使用平行、垂直和斜列三种车位的识别检测和更新算法,并对三种车位检测算法进行了实测。采用几何路径规划方式对三种车位的泊入路径进行了分析研究,提出多段式路径规划算法,并给出各参数的计算方式。
识别决策模块主要是根据环境感知模块传来的障碍物信息和车辆自身信息,判断是否可以泊车以及规划泊车路径,同时在运动过程中,根据环境信息实施调整运动策略,想运动执行模块发送相应的控制命令,以完成避碰和自动泊车入位。
运动路径规划方法主要分为四类:曲线插值、采样方法、机器学习法和最优控制法。
由于泊车辅助系统的应用场景属于车辆的局部运动规划而非全局路径规划,规划的泊车轨迹应尽量保证曲率的连续性以符合车体的运动学规律。
通过读取方向盘转向传感器实时发出的方向盘角度,控制器可以确定车身角度的变化,并对自身位姿进行更新和纠正。
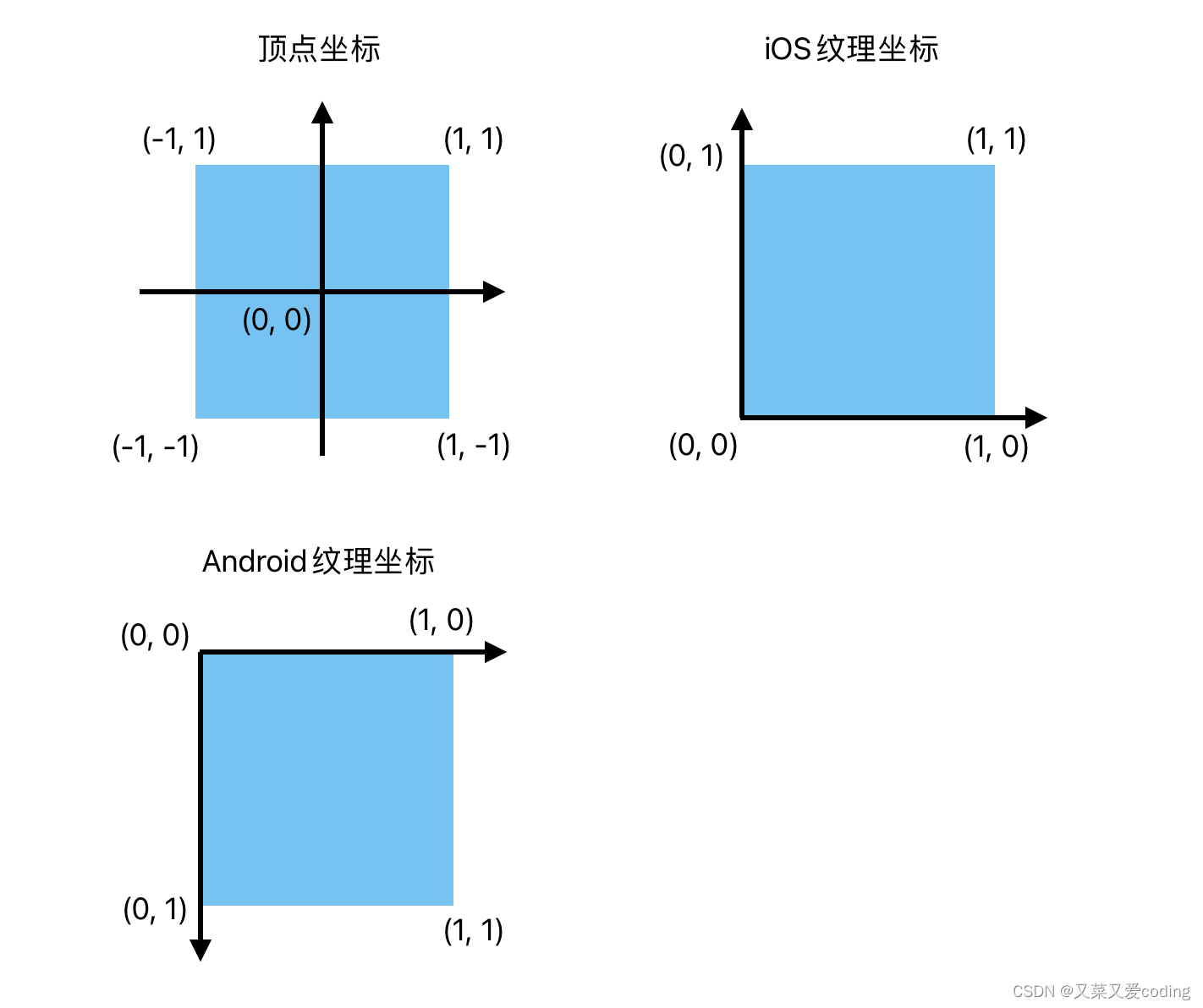
将系统启动时刻车辆的后轮中心的位置设定为二维平面泊车地图坐标系的原点。
3.狭窄车位的自动泊车路径规划与跟踪控制研究
为解决面对狭窄平行车位泊车系统无法求出泊车路径、路径曲率突变、路径不符合汽车机械约束和避障约束问题,将路径规划问题解耦成进入段路径规划和调整段路径规划,并以整个泊车过程时间最小为优化成本。
对于车位外的调整,为了使得路径曲率连续,并考虑避障约束和汽车自身性能约束,设计了一种回旋圆弧直线组合方法的进入段泊车路径。
针对狭窄车位,车位内调整更注重车辆是否能保持正确的位姿和前轮转角停在目标终点,设计了一种直线圆弧组合方法的调整段泊车路径。
针对自动泊车过程曲率较大,汽车前轮转角速率和大小的限制制约了跟踪控制精度的问题,提出了一种基于粒子群优化的非线性模型预测控制方法。
在泊车起始时加入了一个沿直线前进行驶一段路径的规划,解决部分汽车初始位姿状态下无法规划泊车路径的问题,即将进入段泊车路径规划分为前进段路径和后退段路径。
前进段路径就是假设汽车以加速后减速的方式向前行驶了L距离,计算汽车后退段泊车规划时的车辆初始位姿状态



![路径总和[简单]](https://img-blog.csdnimg.cn/60348911162c46298b7362e67cee9db9.png)