0. 内容
1. 课程回顾
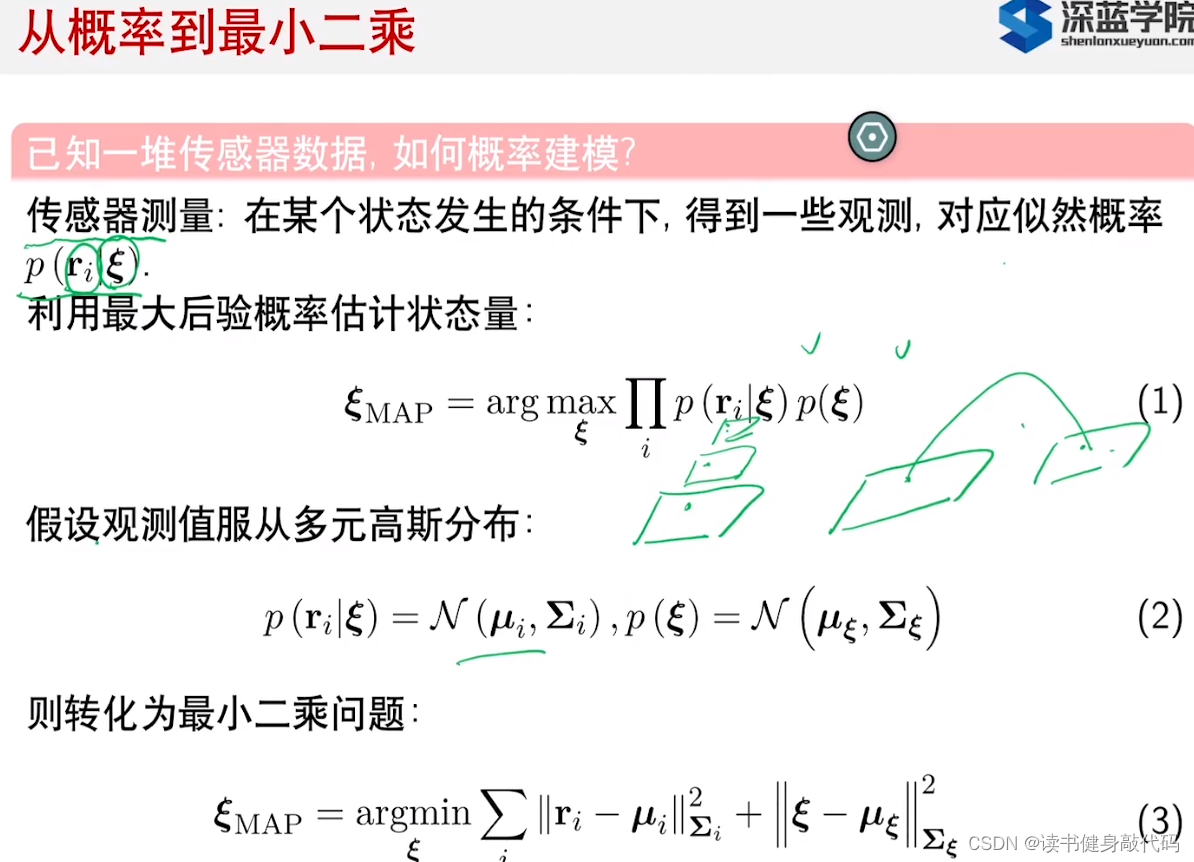
最大后验概率MAP,如果不知道先验则是MLE,如果观测服从高斯分布(关于为什么服从高斯分布有个pdf)则可转化为LSP。
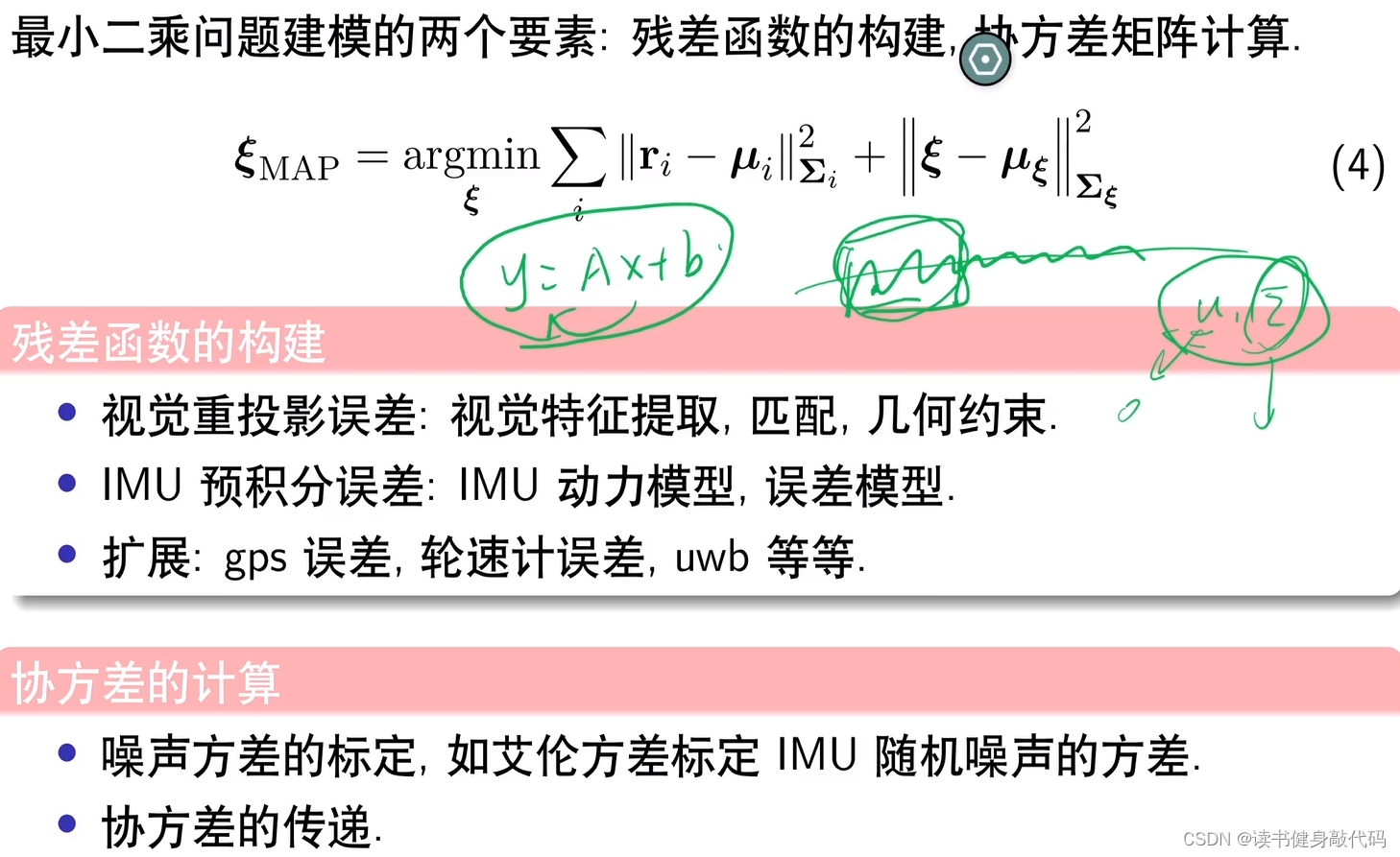
残差构建主要讲了IMU残差的构建,包括预积分模型,误差模型(详见第3章笔记),预积分的误差推导有:一阶泰勒展开(优化常用)和误差的一阶导数(Filter常用)两种方法。
构建出残差,计算出了协方差矩阵,就可以进行信息融合了(如果融合其他类型的传感器也是如此:gps,chassis,uwb等,观测和预测构建残差,计算出测量的协防差矩阵作为权重,加到残差项中对整个系统进行优化,就实现了对一个sensor information fusion)
-
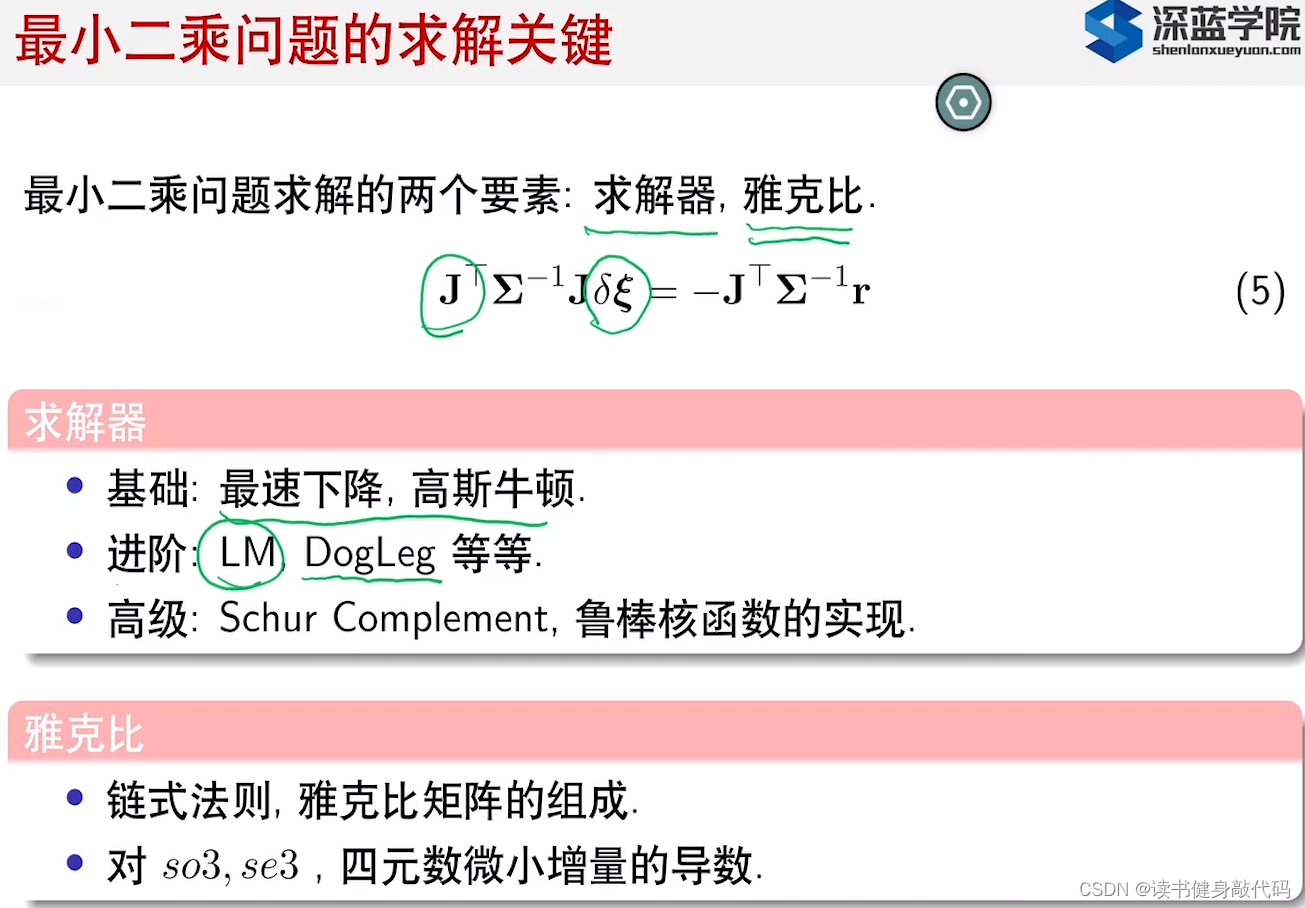
Dogleg算法相对于LM算法求解更快,迭代次数更少,原因是它迭代失败次数更少,不会出现LM中cost function上升而拒绝本次迭代的case。
-
Shur Complement在Sliding window中的marg过程中用到,
鲁棒核函数用于抑制outlier,赋予inlier和outlier不同的权重。
2. VIO拓展
主要推荐一些论文,供后续进一步深入研究。
2.1 VIO综述
主要是黄国强和Muzza(木吒,uzh)组的工作。
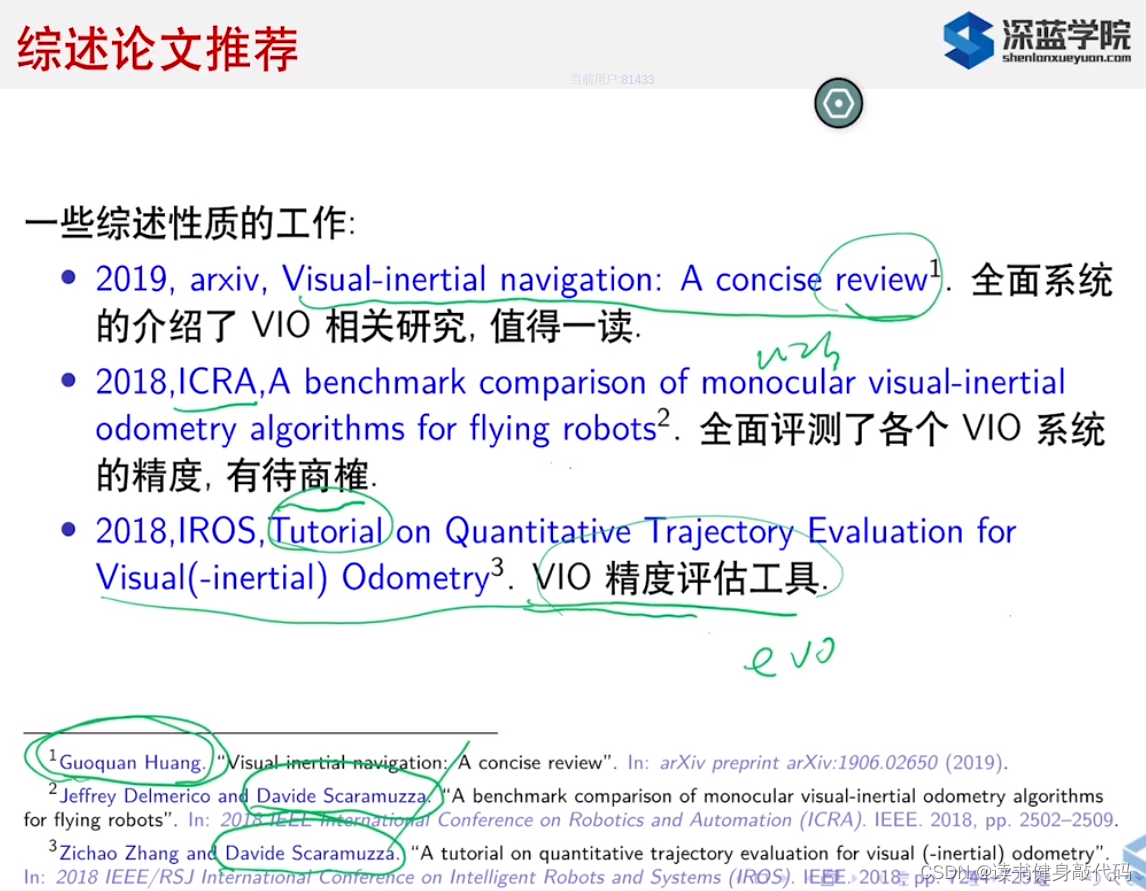
- 2019年黄国强的综述很值得一读。
- 2018对VIO的各种方法进行了对比,但是精度对比有待商榷,比如没有拿到MSCKF的源码,可能精度没有那么高
- EVO论文(之前Ch7作业中将预测和GT进行align评估时使用的就是这个工具,当时挖了个坑,这里可以填上)
木吒组的工作非常扎实和细致,建议follow
2.2 Filter based VIO
- 最经典的还是MSCKF(2007年的,但是没开源)
- 2018的stereo MSCKF
- 2014li mingyang大神(博士论文)对MSCKF的各种改进和完善(MSCKF加入可观性约束,时间,标定,IMU内参标定等)
2.3 optimization based VIO
- OKVIS最早的VIO系统,支持单目,双目,开源。
- 2016年这篇是从李代数出发对IMU与积分进行详细的推导(课程中主要是以四元数进行推导,非常详细),wangjin大佬在开始复现这篇论文时还发现了论文中的一些错误,将复现代码开源在Github上:learnVIORB
- VINS-MONO已经进行相关推荐
2.4 VIO一致性
- 2008年huang guoquan FEJ论文(Ch4第4节提及),这篇解决了在优化过程中Jacobian线性化点的不同而导致的可观性矩阵的解的零空间发生变化的问题(被marg掉的点,后面关于此点的Jacobian在求取的时候,其线性化点就不能再改变,如果改变就会导致可观性退化的问题),解决思路是固定线性化点。
- 2011对上述工作进行了改进,改为可观性约束,后面的关于MSCKF的开源的代码中使用的都是这个约束(上面的ref 4,6)。
- 2015年不变性的论文非常本质,不是从工程方面出发,指出系统的不确定性应该与Jacobian无关(有关于不变形代码推导的matlab的代码),网上也有关于优化的不变性的代码,可以搜
- 2017张腾(腾神?)不变性EKF的分析,比如用在BA中,用在VIO中,2018年开始有很多实验室开始做关于不变性的相关工作,invariant-EKF,invariant-optimization等工作
2.5 利用img构建不同的残差模型
- 2016(高博读博的组,TUM)主要基于DSO和LSD SLAM做的一套
- 2018针对点线面特征的分析(如果点特征够用的话,线面特征对于性能的提升不会很大)
- 2017年MSCKF组(不需要角点这么强的约束,有梯度变化的地方就能形成边缘(曲线))此工作(没开源)跟上海交大zhouzhangmin老师的structure SLAM里的直线的参数化方式非常接近
- 2017 (之前的REVO中了ICCV),将点的重投影误差变成线的
- 2018将上面的工作加入了IMU投了期刊
关于点线面等不同的特征的方法,在17-19年有很多关于这方面的工作,最主要的是如何构建残差。
2.6 VIO和其他传感器融合
- 2019(huangguoqiang组的交换生),在有激光先验地图的基础上进行VIO(精度更高)
- 2018Qintong对VINS-MONO的扩展版,能融合GPS,但木,双目等信息
- 2017做机器人的话值得一读,VIO+chassis的系统,也增加了平面约束(机器人在平面上做匀速直线运动时为什么IMU提供的尺度信息没用了?速度的导数为0?)
- 2019年(港中文liuyunfei组,做AGV的),应该有平面假设,叫SE(2)-XYZ约束(一种参数化方式),虽然不是VIO系统,但值得一读。
2.7 初始化相关论文在Ch7已经有所推荐
https://blog.csdn.net/qq_37746927/article/details/133782580#t9
2.8 参考文献
- Guoquan Huang. “Visual-inertial navigation: A concise review”. In: arXiv preprint arXiv:1906.02650 (2019).
- Jeffrey Delmerico and Davide Scaramuzza. “A benchmark comparison of monocular visual-inertial odometry algorithms for flying robots”. In: 2018 IEEE International Conference on Robotics and Automation (ICRA). IEEE. 2018, pp. 2502–2509.
- Zichao Zhang and Davide Scaramuzza. “A tutorial on quantitative trajectory evaluation for visual (-inertial) odometry”. In: 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE. 2018, pp. 7244–7251.
- Michael Bloesch et al. “Iterated extended Kalman filter based visual-inertial odometry using direct photometric feedback”. In: The International Journal of Robotics Research 36.10 (2017), pp. 1053–1072.
- Anastasios I Mourikis and Stergios I Roumeliotis. “A multi-state constraint Kalman filter for vision-aided inertial navigation”. In: Proceedings 2007 IEEE International Conference on Robotics and Automation. IEEE. 2007, pp. 3565–3572.
- Ke Sun et al. “Robust stereo visual inertial odometry for fast autonomous flight”. In: IEEE Robotics and Automation Letters 3.2 (2018), pp. 965–972.
- Mingyang Li. “Visual-inertial odometry on resource-constrained systems”. PhD thesis. UC Riverside, 2014.
- Stefan Leutenegger et al. “Keyframe-based visual–inertial odometry using nonlinear optimization”. In: The International Journal of Robotics Research 34.3 (2015), pp. 314–334.
- Christian Forster et al. “On-Manifold Preintegration for Real-Time Visual–Inertial Odometry”. In: IEEE Transactions on Robotics 33.1 (2016), pp. 1–21.
- Guoquan P Huang, Anastasios I Mourikis, and Stergios I Roumeliotis. “Analysis and improvement of the consistency of extended Kalman filter based SLAM”. In: 2008 IEEE International Conference on Robotics and Automation. IEEE. 2008,pp. 473–479.
- Guoquan P Huang, Anastasios I Mourikis, and Stergios I Roumeliotis. “An observability-constrained sliding window filter for SLAM”. In: 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE. 2011, pp. 65–72.
- Axel Barrau and Silvere Bonnabel. “An EKF-SLAM algorithm with consistency properties”. In: arXiv preprint arXiv:1510.06263 (2015).
- Kanzhi Wu et al. “An invariant-EKF VINS algorithm for improving consistency”. In: 2017 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS). IEEE. 2017, pp. 1578–1585. - Vladyslav Usenko et al. “Direct visual-inertial odometry with stereo cameras”. In: 2016 IEEE International Conference on Robotics and Automation (ICRA). IEEE. 2016, pp. 1885–1892.
- Yulin Yang and Guoquan Huang. “Observability Analysis of Aided INS with Heterogeneous Features of Points, Lines and Planes”. In: IEEE Transactions on Robotics (Aug. 2019).
- Hongsheng Yu and Anastasios I Mourikis. “Edge-based visual-inertial odometry”. In: 2017 IEEE/RSJ International
Conference on Intelligent Robots and Systems (IROS). IEEE. 2017, pp. 6670–6677. - Juan José Tarrio and Sol Pedre. “Realtime edge based visual inertial odometry for MAV teleoperation in indoor environments”. In: Journal of Intelligent & Robotic Systems 90.1-2 (2018), pp. 235–252.
- Xingxing Zuo et al. “Visual-Inertial Localization with Prior LiDAR Map Constraints”. In: IEEE Robotics and Automation Letters (RA-L) (July 2019).
- Tong Qin et al. “A General Optimization-based Framework for Global Pose Estimation with Multiple Sensors”. In: arXiv preprint arXiv:1901.03642 (2019).
- Kejian J Wu et al. “Vins on wheels”. In: 2017 IEEE International Conference on Robotics and Automation (ICRA). IEEE. 2017, pp. 5155–5162.
- Fan Zheng and Yun-Hui Liu. “Visual-Odometric Localization and Mapping for Ground Vehicles Using SE(2)-XYZ Constraints”. In: Proc. IEEE Int. Conf. Robot. Autom (ICRA). 2019.
至此VIO课程的整体已经结束,后面有课程大作业和一次关于近期的Square Root BA的论文的复现工作,大家继续加油,一起推动SLAM领域的发展。