文章目录
- ISPRS J PHOTOGRAMM
- Introduction
- Phase unwrapping
- 相位解缠算法综述
- Time series analysis of InSAR data
- Persistent Scatterer Interferometry (PSI)--持久散射体
- ☆☆☆☆PSInSAR && SBAS-InSAR☆☆☆☆
- PS-InSAR
- SBAS-InSAR
- DS-InSAR(分布式散射体干涉)
- SqueeSAR的技术要点
- Stable point network (SPN)
- Persistent scatterer pairs (PSP)
- StaMPS(MAINSAR)——成品软件
- Coherence Pixel Technique (CPT)
- ☆☆☆☆Small Baseline Subset (SBAS)☆☆☆☆
- SqueeSAR
- Quasi-PS technique (QPS)
- 模型间比较
- 时序InSAR的发展趋势
ISPRS J PHOTOGRAMM
Introduction
合成孔径雷达(SAR)系统发射电磁(EM)波并收集目标在天线朝向方向返回的能量。许多雷达系统在微波频段发射相干辐射,这意味着电磁辐射具有正弦辐射模式,振幅经过明确定义的最小值和最大值。每个波长(两个连续最大值或最小值之间的距离)对应于360°或2π弧度。波长定义了SAR相位测量的单位距离。
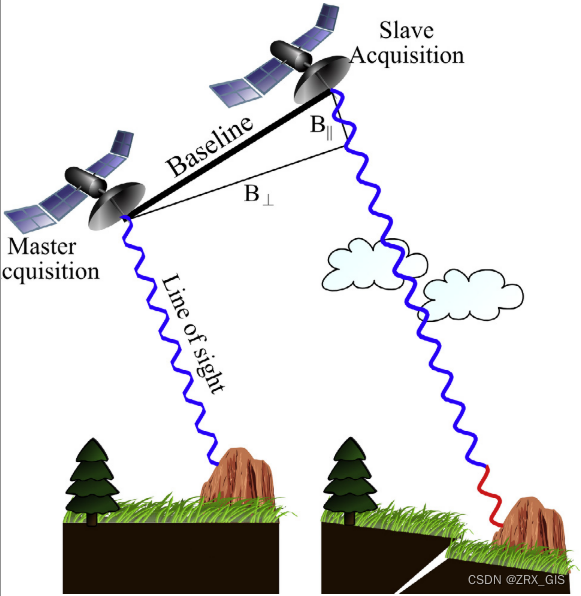
SAR测量具有两个可观测量:幅度和相位。幅度是反射回来的电磁波的强度,与目标的形状、方向和电性质相关。当波在空气中传播时,波的相位从-p变化到+p,每个波长的距离都会发生变化。SAR系统可以非常精确地测量返回信号的相位,但直接测量范围(总波长数)是困难的。这类似于拥有一个非常精确的模拟手表,但没有分钟或小时的指针。即使这只手表能够以不同方式测量小的变化,超过一分钟的时间(秒针3600次旋转)将导致模糊的测量结果。InSAR相位测量检测两个SAR采集之间的变化,通常称为主采集和从采集。图1说明了典型InSAR测量的基本相位可观测量。
这里可以给出单点散射体的相位返回值
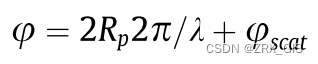
其中,R表示雷达与地面点之间的举例,余项相位表示散射相位贡献,其与目标电特性有关。
InSAR测量对地形、地面运动、大气条件、卫星之间的空间分离以及地面的电性质特别敏感,如公式(1.2)所示(Ferretti等,2001年;Colesanti等,2003年)。InSAR相位信号是所有这些因素变化的总和,根据应用的不同,有些因素可以被视为噪声。例如,如果生成数字高程模型(DEM)是主要目标,那么形变可以被视为噪声。类似地,时间序列分析方法必须去除稳定的地形相位贡献(DEM)以获得地面运动信息。

flat:参考椭球相位
topo:地形相位
orbit:轨道相位
defo:形变相位
tropo:对流层相位
iono:电离层相位
scat:与散射体的电性质相关的相位
noise:组合噪声相位(the combined noise term)
参考椭球相位、地形相位和形变相位都是两次通过之间的距离差方程的一部分,该方程是卫星轨道和地形的函数。距离的变化与相位之间的关系可以根据以下公式(Bamler和Hartl,1998年)表示:

R表示卫星两次通过之间的距离变化
参考椭球相位是由地球形状造成,可以根据卫星轨道和大地基准计算得出
B表示平行基线
地形相位是与参考椭球上方的地形相关的干涉图的相位成分,与垂直基线成正比

R表示目标与卫星之间的距离
z is topography above the reference ellipsoid
seta is antenna look angle

在这项工作中,他把大气相位拆开了,分别为对流层延迟和电离层延迟
将对流层延迟概括为湿延迟和干延迟,对流层延迟主要是因为对流层的折射率略高于自由空间的折射率。
通常,对流层延迟出现在高频的信号中,例如c波段,常被视为APS。
对于低频信号,例如L波段,电离层总电子量(Total Electron Content,TEC)的变化会显著影响干涉相位

由于散射体电学特征引起的相位贡献通常被认为在地形和形变观测中可以忽略,当然在一些基于散射体电介质特性的变化中研究中需要考虑,例如,估计穿透深度、冻土的水当量、土壤含水量。
干涉测量可以反映不同现象的变化,通常会作出一些假设来分析结果。一般来说,较大的信号会主导干涉图,而像穿透深度变化这种较小的信号就会被地表形变或者地形等较大的信号所覆盖。研究较小信号需要对较大的信号具备较深的理解。
干涉相位噪声项可以和相干性关联,可以分解为四种不同的相干项

total:interferometric coherence,total=1时完全不失相干
spatial:spatial baseline decorrelation,与两次卫星轨道之间的水平距离有关
temporal: temporal decorrelation,当像素单元的散射体的物理性质随时间变化时,就会产生
Doppler:Doppler centroid decorrelation,与卫星姿态有关
thermal:thermal decorrelation,热噪声可以忽略
总结:总的来说,干涉相位是许多因素作用的综合
Phase unwrapping
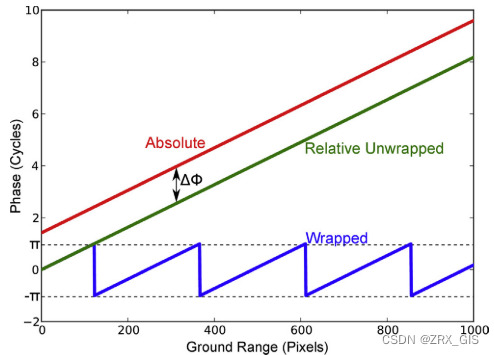
定义:InSAR观测到的相位是被缠绕在[-pi, pi]的,我们将这种周期的相位转变为连续的相位数值,这就是相位解缠。
参考点(起始点)的相位被定义为0,N表示最有一个点,里面的是复相位导数
由于InSAR测量是相对测量,因此绝对相位和展开相位之间存在偏移,可以通过外部数据(GPS)来解决。
解缠也不定义为 sum of the complex-wrapped differences of the principal values
相位解缠算法综述
总的来说,相位展开算法可以分为两个类
(1)路径跟踪【path-following】
路径跟踪是沿着缠绕相位中的路径并未考虑每个像素
现在以后的各种路径追踪的算法都是利用局部展开函数,从参考点开始解缠所有像素(参考点的相位是先验已知或者假定为0)
Sequential paths是路径跟踪中最简单的路径。Sequential paths不使用quality maps来定义首选的路径,任何填充区域(2D或者3D)曲线都可以用来定义Sequential paths,这些路径通常与基于滤波器的解缠函数结合使用,可以在解缠操作时有效的减少噪声引起的错误。
用于2D数据最早开始的算法是Goldstein的分支切割算法(branch-cut algorithm)
分支切割算法理论:定义“residues”,residues是由数据中的噪声或者不连续性引起的局部误差。在分支切割算法中,residues是通过对数据中的相位差进行旋转求和来计算的(可正可负)
对于具有相反符号的残差或图像边缘和残差之间,会放置一个“branch-cut”;然后,计算出一条不经过任何残差的展开路径。
除Sequential paths外,另一类path-following是利用quality maps(或者cost maps)的。
quality maps显示每个像素相对于其他像素的质量,cost maps显示像素的惩罚值。两个map在数值含以上相反,但是在使用时核心思想一致:使用高质量(低成本)像素,抑制低质量(高成本)像素。
(2)路径无关【path-independent】
路径无关考虑全局,最小化解缠前后数据不匹配的问题。
path-independent在全部数据上操作,不需要解缠路径。
path-independent的关键在于最小L-P范数(包括最小二乘【L-2范数】),L-P范数的假设是解缠后的导数与解缠前的复相位导数之间具有一致性(低不匹配度)。
上式计算的是不匹配度,N为像素总数,戴帽子的是解缠的相位,不戴帽子的是解缠前的相位,p表示范数的维度,式子需满足零旋转场条件(无残差),下式计算的就是旋转算子(phi表示解缠前相位),当式子满足时,following the Helmholtz decomposition, the L-p norm solution reduces to the following Poisson’s equation

下式倒三角的平方表示拉普拉斯算子,带两个帽子的表示解缠后的相位,不带帽子的表示缠绕相位。式子右侧可以通过缠绕相位值计算得出。
Time series analysis of InSAR data
(1)Coherent Pixels Technique (CPT):相干像素技术
(2)Delft Persistent Scatterer Interferometry (DePSI):Delft持续散射体干涉
(3)Interferometric Point Target Analysis (IPTA):干涉点目标分析
(4)Permanent Scatterer InSAR (PSInSAR):永久散射体
(5)Persistent Scatterer Pairs (PSP):持续散射对
(6)Quasi Persistent Scatterers (QPS):Quasi 持续散射体
(7)Small Baseline Subset (SBAS):小基线子集
(8)Stable Points Network (SPN):稳定点网
(9)SqueeSAR
(10)Persistent Scatterers (StaMPS):持续散射体
持续散射体?分布式散射体?这两者似乎差别较大,在论文中有描述:“一些算法主要依赖于持续性散射体(persistent scatterers),而其他算法则专注于分布式散射体(distributed scatterers),分布式和持续性散射体具有真实的物理差异。”
Q1:持续(persistent)和永久(permanent)是否等价?
Persistent Scatterer Interferometry (PSI)–持久散射体
(1)PSI、PSInSAR、IPTA具有相同的理论,可以统称为PSI
(2)算法核心:利用持续散射体(PS),这些散射体的尺寸小于SAR分辨单元,PS不受基线去相关的影响,并且即使基线长于临界基线,也可以形成干涉图的单个主堆叠,这导致分布式散射体的相位去相关,所有采集的数据都可以用来形成干涉图。
(3)PSI适合城市的时序分析
(4)主要步骤:1、单主叠加干涉图的生成及地形相位去除——2、基于振幅频散法的选点——3、APS的估计和去除——4、寻找更多的点
【1】单主叠加干涉图的生成及地形相位去除时,由于基线较大,一些干涉图将没有可见条纹,但是包含PS的像素是相干的
【2】Persistent scatterer candidates (PSC)一般基于整幅频散法选定,原理:相同量的噪声引起的相位变化在强散射体(高振福)中将小得多,单个像素的振幅频散定义为其标准差与平均值的比率,通常选择小于0.25的作为PSC,通过使用幅度离散方法从小基线干涉图开始进行迭代计算,计算所选点的DEM校正值和变形速度估计。
【3】计算大气相位屏幕(APS):由于干涉图是作为一个单一的主干涉图堆栈形成的,所有干涉图都具有来自master的大气贡献,可以通过残差的平均值来估计。一旦知道了master中所有PSC的大气相位,就可以在空间域中应用低通滤波器和Kriging操作来计算master的APS。其他获取的APS可以以相同的方式计算,从而可以从所有干涉图中去除大气相位。所有PSI技术都需要较多可靠解决方案的场景(>10),特别是在基线不准确和地形高度图不准确的情况下,以正确估计大气相位屏幕。
【4】在计算APS后,可以从观测中去除不需要的信号,并记录像素的DEM误差和散射体速度
☆☆☆☆PSInSAR && SBAS-InSAR☆☆☆☆
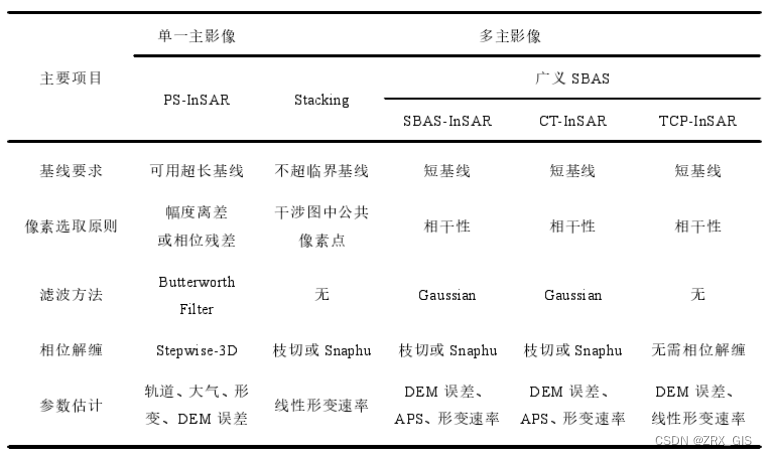
现阶段,用于时序InSAR处理的方法主要包括:PS-InSAR、SBAS-InSAR、相位叠加(stacking)方法、最小二乘法、垂直航迹干涉(CrossTrack InSAR,ct-InSAR)以及临时想干点(Temporal Conherence Point InSAR,TCP-InSAR)
PS-InSAR和SBAS-InSAR是众多时序InSAR方法中应用最多的两种
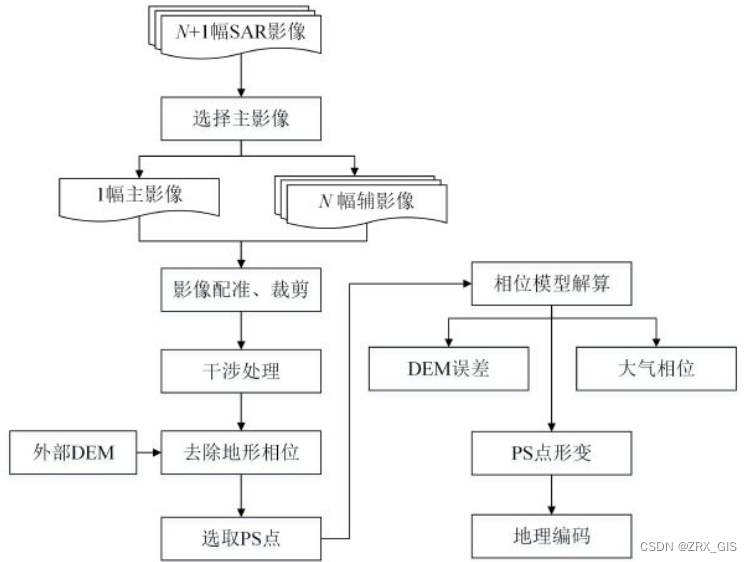
PS-InSAR
(1)核心思想:利用多晶同一地区的SAR影像,通过相位和振幅信息,查找不受时空去相关影响的点(人工建筑物或者裸露的延时)
(2)FOR APS:理论上PS-InSAR可以减轻目标的大气等误差的影响,从而估算出每个PS点的位移速率和时序位移
(3)缺点:不适合去研究非人工地表区域 (滑坡问题似乎不适应,尤其是较为偏远的地区)
(4)特点:由于永久散射体的散射性随时间的变化较小,故所有的SAR影像都可以和主影像干涉,组成干涉对,即使是一些时空基线较长的
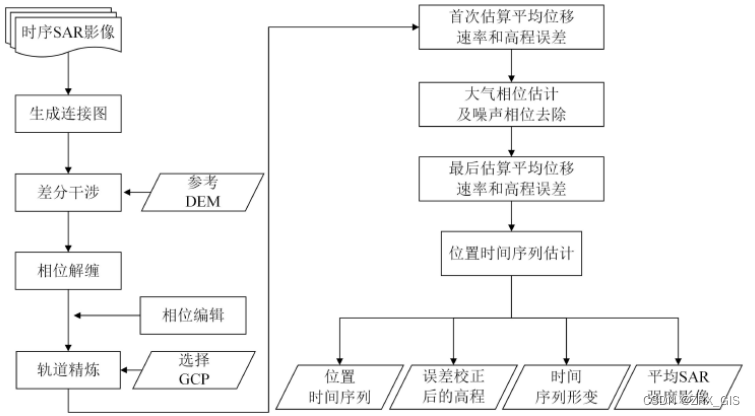
SBAS-InSAR
(1)核心思想:通过选取短时空基线像对减少时空去相关的影像
(2)灵魂伴侣:SBAS通常需要和多视或者多重空间滤波搭配,用来增加散射体的信噪比
(3)局限性:SABS技术时一种通过牺牲影像分辨率换取估计精度的方法
(4)过程描述:SBAS在处理时会选取多张主影像,通过较短的时空基线组合方式进行干涉处理,减弱时空失相关对形变结果带来的干扰
DS-InSAR(分布式散射体干涉)
(1)核心思想:筛选出同质点,根据同质点的统计特性优化分布式目标的相位,降低噪声对分布式目标的影像,联合PS点和DS点进行形变解算,最后达到提高非人工区域的点密度的目的
(2)同质点识别:同质点的识别是指判别SAR影像数据集中一定空间范围内的两个像元是否属于同一地物,核心在于抽取同一像元在时间维度上的强度信息,度量两个样本的相似程度,从而判断是否为同质点,事实上,利用D-InSAR进行形变监测的概念早在SBAS技术和StamPS技术中已建立,当时学界更多的是以相干、非相干目标加以区分从而弱化永久散射体(PS)和分布式散射体(DS)的物理界限,因此,从数据处理的角度来讲,以SBAS为代表的小基线技术与SqueeSAR技术及其变种有本质不同,但他们又同时强调DS目标的信噪比,因而均属于相位滤波。、
(3)分布式散射体:是指尺寸小于SAR分辨率单元的散射体,包括小型结构和微小表面特征。它们在雷达影像中呈现出一定的空间延伸
(4)永久性散射体:是指具有相对稳定散射特性的地表目标,通常是大型结构或表面特征。它们在不同时间的雷达影像中保持相对稳定
SqueeSAR的技术要点
(1)通过同质点选取算法增强时序InSAR协方差矩阵的估算精度,并同时辅助PS和DS目标的分离:前提条件是相同SAR影像质地的像素具有相同相位中心,因此在时序统计腿短的框架下,选取具有相同SAR统计分布的像素参与平均不仅可以提高相位信噪比,还能保留图像的空间分辨率。相比之下,SBAS多采用多视或者空间自适应滤波,是一种以牺牲空间分辨率为代价换取相位质量提升的方法,在复杂形变特征环境下,这类方法极易损失细节,并伴随非形变区域的误判
(2)通过相位优化算法从协方差矩阵中恢复时序SAR图像的相位,SqueeSAR在样本协方差矩阵服从复Wishart分布的基础上,采用极大似然估计方法得到优化后的时序相位,由于似然估计无法解析表达式,需要采用非线性优化,挤压待估计参数,便成为Squeeze一词的由来。值得注意的是,SqueeSar一方面运用了所有干涉对的信息,另一方面却并未从滤波后的个弹射相位中直接提取时序相位,这与大多数时序InSAR技术采用相位三角关系从滤波后的干涉相位中直接解算时序相位有本质区别,在优化DS之后,与PS目标一起融入传统PS-InSAR数据处理框架就可以获得分别防范精度、空间分辨率增强的时序形变产品
Stable point network (SPN)
PSI算法使用的是单一主影像的堆栈方式,原则上,PS不受基线相关性的影响。尽管SPN利用了PS,但是它使用的是一个多主影像的堆栈,旨在限制不完美PS的几何相关性。SPN可以使用三种不同的选择标准来选择OS:振幅的稳定性(amplitude stability)、干涉的相干性(interferometric coherence)以及光谱的相干性(spectral coherence)
Persistent scatterer pairs (PSP)
PSI依赖于去除伪影(伪影是指在干涉测量中由于各种原因而引起的误差或干扰,导致干涉图中出现的错误信号,这些伪影可能由于大气湍流、地表形变、系统误差、信号干扰等因素引起),为了去除伪影,一般会假设形变是线性的。那么基于这个假设,伪影在空间上就是相关的,并且在邻近点时可以忽略。PSP使用临近点定义弧,并构建网络,用最小的弧集定义所有潜在的PS,对于每个弧,通过网络计算高度差和形变速度差,然后可以使用与有限差分积分来集成,最终获得解缠结果。
StaMPS(MAINSAR)——成品软件
(1)StaMPS与PSI方法有一些相似之处,但是该算法将PS定义为具有稳定时空相位特征的散射体,而不考虑其振幅。因此,尽管这些点被称为DS,但是仅是相位层次。这使得StaMPS可以在非城市地形上用于测量形变。
(2)StaMPS和PSI都是利用振幅分散来进行Persistent scatterer candidates (PSC)的选择,但是StaMPS的阈值高(0.4)。StaMPS采用迭代模型,使用临近的PSC计算当前PSC的相干性,删除低相干的PSC。PSI仅选取具有稳定时间行为的PSC,比StaMPS消除了更多的点。在PSI中模型是地形、线性相位和长波长误差源(大气和轨道)的组合,而StaMPS中唯一的约束是局部窗口中相位的相位方差。
Coherence Pixel Technique (CPT)
相干像素技术(CPT)与PSI方法类似,它也是利用了PS进行分析,从解缠前开始。然而,CPT使用三维最小生成树,以时间、垂直基线?和多普勒频率为三个轴,形成一个多主影像的干涉堆栈。通过使用共轭梯度法(Conjugate Gradient Method,CGM)进行迭代优化路径解决弧上的干涉相位。在使用初始线性模型对干涉图像进行展开后,可以使用奇异值分解(singular value decomposition,SVD)来聚集非线性形变。
☆☆☆☆Small Baseline Subset (SBAS)☆☆☆☆
SBAS算法利用DS(分布式散射体)和奇异值分解将独立的解缠干涉图在时间上连接起来,STBAS(Small Temporal Baseline Subset)在SBAS基础上仅使用具有短时间基线的干涉图。短时间基线对高度变化很重要(例如湿地水位变化检测),一般将SBAS和STBAS统称为SBAS。
基本原理:SBAS将一组解缠后的干涉图组合生成时序。使用目标信号的平均基线参数来选择这些干涉图的主对和从对。
常用参数:对于形变分析,临界基线的25%(400m),时间基线为1年
STBAS算法选择最短的时间基线对,而不管空间上的表现,这些干涉图必须被分配到准确的单个图像。
处理过程:
(1)使用的解缠干涉图中包含地形、大气和形变信号。地形信号是垂直基线的放缩,被包括在所有的干涉图中。可以通过如下组合所有干涉图来计算地形

(2)在去除地形相位后,信号仅包括大气和形变信号,所得到的干涉图被转换成时间相邻采集之间的平均phase速度,大气相位改正通过提取具有高空间和低时间相关性的信号来完成的,使用时空滤波器,同PSI。
SqueeSAR
SqueeSAR被称为PSInSAR V2 ,与PSInSAR的区别在于将PS和DS结合起来进行时序分析,PSI仅关注PS。
算法核心:PS和DS共同构建一个多主影像的网络,并定义一个新的距离度量(Kolmogorov–Smirnov【KS】检验,KS使用两个累积分布函数【CDF】之间的绝对差的最大值作为其度量值)来实现,以找到干涉图像堆栈汇中相同空间邻域中点的真确分组。SqueeSAR中使用KS检验利用一系列干涉图像的振幅来计算概率密度函数和CDF。然后,像素与其具有相似CDF(或低KS距离)的临近像素结合,形成邻域。
Quasi-PS technique (QPS)
Quasi-PS利用部分相干目标来增加观测的空间密度。
改进处:相较于其他PS算法(多数PS采用单主影像堆栈),Quasi-PS使用多主影像来限制基线相关性,空间滤波也可以应用与改善DS的相位响应。与SqueeSAR不同,QPS不使用统计相似性度量来对DS进行分组。
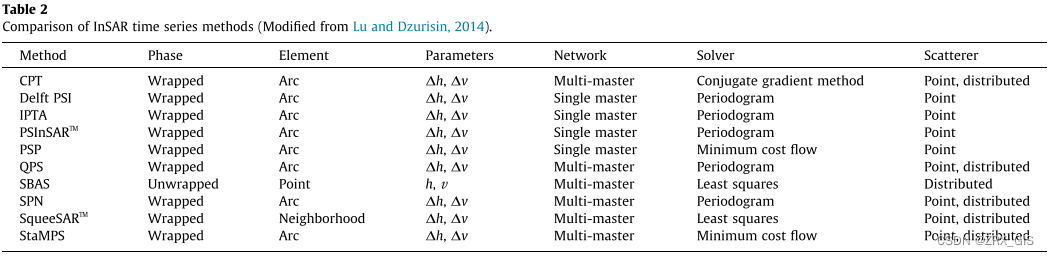
模型间比较
Persistent Scatterer Interferometry (PSI)
Stanford Method for Persistent Scatterers (StaMPS, a.k.a. MAINSAR)
Small Baseline Subset (SBAS)
SqueeSAR
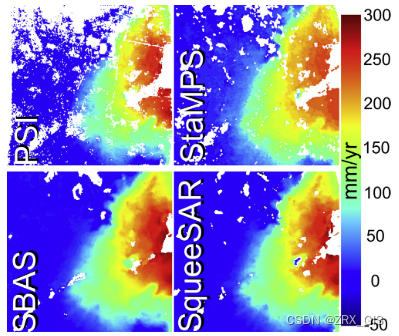
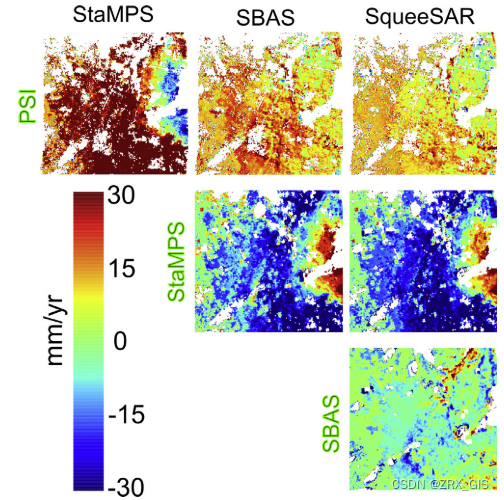
(1)在评价四个方法的性能时,首先计算了他们的年平均形变,然后计算两两之间的残差,整体来看,SBAS和SqueeSAR方法之间的差异最小,StaMPS方法之间的差异最大。
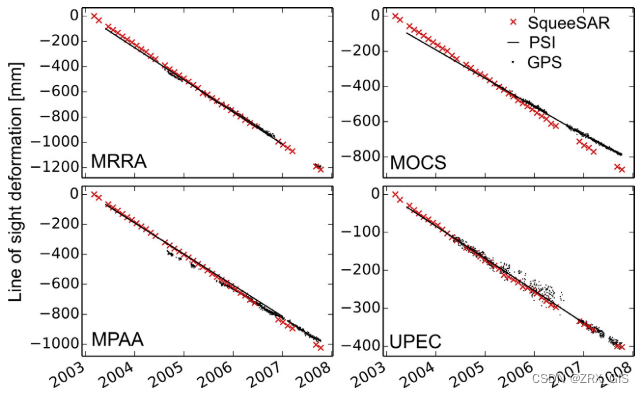
(2)比较了GPS的时序结果和SqueeSAR&PSI时序LOS向形变速率
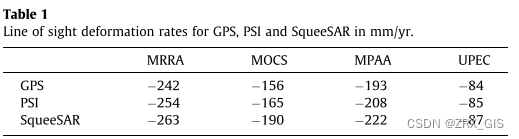
(3)GPS时序、SqueeSAR和PSI时序的比较如下所示
(4)总的来看,每种方法都有适应的一组条件。例如,PSI使用PS,这些散射体不受基线相关性的影响,可以利用长基线的干涉图来构建时序,因此,适应监测城市化地表运动。相比之下,SBAS和StaMPS主要利用DS,这些散射体在一定程度上会受到基线相关性的影响,适用于非城市地区,再比如SqueeSAR在各个两种场景都有较好的表现。



![[C/C++]数据结构 链表OJ题:移除链表元素](https://img-blog.csdnimg.cn/1c13469b24f341339233c570f3cfb54f.png)