目录
- 前言
- 流程图
- autoboot_command
- run_command_list
- do_bootm
- do_bootm_states
- do_bootm_linux
- boot_prep_linux
- boot_jump_linux
前言
本文在u-boot启动流程分析这篇文章的基础上,简要梳理uboot启动linux kernel的流程。
流程图
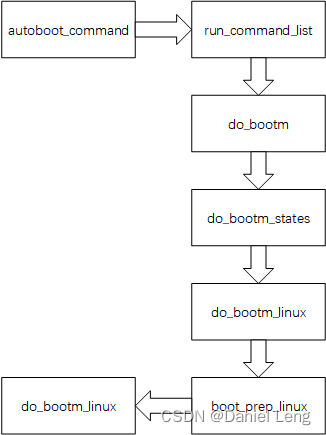
其中,
- autoboot_command位于uboot/common/autoboot.c
- run_command_list位于uboot/common/cli.c
- do_bootm位于uboot/cmd/bootm.c
- do_bootm_states位于uboot/common/bootm.c
- do_bootm_linux位于uboot/arch/arm/lib/bootm.c
- boot_prep_linux位于uboot/arch/arm/lib/bootm.c
- boot_jump_linux位于uboot/arch/arm/lib/bootm.c
autoboot_command
void autoboot_command(const char *s)
{
debug("### main_loop: bootcmd=\"%s\"\n", s ? s : "<UNDEFINED>");
if (s && (stored_bootdelay == -2 ||
(stored_bootdelay != -1 && !abortboot(stored_bootdelay)))) {
bool lock;
int prev;
lock = IS_ENABLED(CONFIG_AUTOBOOT_KEYED) &&
!IS_ENABLED(CONFIG_AUTOBOOT_KEYED_CTRLC);
if (lock)
prev = disable_ctrlc(1); /* disable Ctrl-C checking */
run_command_list(s, -1, 0);
if (lock)
disable_ctrlc(prev); /* restore Ctrl-C checking */
}
if (IS_ENABLED(CONFIG_USE_AUTOBOOT_MENUKEY) &&
menukey == AUTOBOOT_MENUKEY) {
s = env_get("menucmd");
if (s)
run_command_list(s, -1, 0);
}
}
其中,abortboot会等待一段时间timeout(由环境变量bootdelay设定),
如果有按键被按下,则会返回1,此时将停止启动linux kernel,返回命令行。如果在timeout后依然无按键被按下,则继续执行启动linux kernel的命令。
run_command_list
run_command_list调用do_bootm的流程实现的关键点:

在上面的代码中,将"bootm"和do_bootm这个函数绑定。
U_BOOT_CMD的定义在uboot/include/command.h中,可以自行查看源代码。
do_bootm
int do_bootm(struct cmd_tbl *cmdtp, int flag, int argc, char *const argv[])
{
#ifdef CONFIG_NEEDS_MANUAL_RELOC
static int relocated = 0;
if (!relocated) {
int i;
/* relocate names of sub-command table */
for (i = 0; i < ARRAY_SIZE(cmd_bootm_sub); i++)
cmd_bootm_sub[i].name += gd->reloc_off;
relocated = 1;
}
#endif
/* determine if we have a sub command */
argc--; argv++;
if (argc > 0) {
char *endp;
simple_strtoul(argv[0], &endp, 16);
/* endp pointing to NULL means that argv[0] was just a
* valid number, pass it along to the normal bootm processing
*
* If endp is ':' or '#' assume a FIT identifier so pass
* along for normal processing.
*
* Right now we assume the first arg should never be '-'
*/
if ((*endp != 0) && (*endp != ':') && (*endp != '#'))
return do_bootm_subcommand(cmdtp, flag, argc, argv);
}
return do_bootm_states(cmdtp, flag, argc, argv, BOOTM_STATE_START |
BOOTM_STATE_FINDOS | BOOTM_STATE_FINDOTHER |
BOOTM_STATE_LOADOS |
#ifdef CONFIG_SYS_BOOT_RAMDISK_HIGH
BOOTM_STATE_RAMDISK |
#endif
#if defined(CONFIG_PPC) || defined(CONFIG_MIPS)
BOOTM_STATE_OS_CMDLINE |
#endif
BOOTM_STATE_OS_PREP | BOOTM_STATE_OS_FAKE_GO |
BOOTM_STATE_OS_GO, &images, 1);
}
这个函数最核心的部分就是调用do_bootm_states。
do_bootm_states
int do_bootm_states(struct cmd_tbl *cmdtp, int flag, int argc,
char *const argv[], int states, bootm_headers_t *images,
int boot_progress)
{
boot_os_fn *boot_fn;
ulong iflag = 0;
int ret = 0, need_boot_fn;
images->state |= states;
/*
* Work through the states and see how far we get. We stop on
* any error.
*/
if (states & BOOTM_STATE_START)
ret = bootm_start(cmdtp, flag, argc, argv);
if (!ret && (states & BOOTM_STATE_FINDOS))
ret = bootm_find_os(cmdtp, flag, argc, argv);
if (!ret && (states & BOOTM_STATE_FINDOTHER))
ret = bootm_find_other(cmdtp, flag, argc, argv);
/* Load the OS */
if (!ret && (states & BOOTM_STATE_LOADOS)) {
iflag = bootm_disable_interrupts();
ret = bootm_load_os(images, 0);
if (ret && ret != BOOTM_ERR_OVERLAP)
goto err;
else if (ret == BOOTM_ERR_OVERLAP)
ret = 0;
}
/* Relocate the ramdisk */
#ifdef CONFIG_SYS_BOOT_RAMDISK_HIGH
if (!ret && (states & BOOTM_STATE_RAMDISK)) {
ulong rd_len = images->rd_end - images->rd_start;
ret = boot_ramdisk_high(&images->lmb, images->rd_start,
rd_len, &images->initrd_start, &images->initrd_end);
if (!ret) {
env_set_hex("initrd_start", images->initrd_start);
env_set_hex("initrd_end", images->initrd_end);
}
}
#endif
#if IMAGE_ENABLE_OF_LIBFDT && defined(CONFIG_LMB)
if (!ret && (states & BOOTM_STATE_FDT)) {
boot_fdt_add_mem_rsv_regions(&images->lmb, images->ft_addr);
ret = boot_relocate_fdt(&images->lmb, &images->ft_addr,
&images->ft_len);
}
#endif
/* From now on, we need the OS boot function */
if (ret)
return ret;
boot_fn = bootm_os_get_boot_func(images->os.os);
need_boot_fn = states & (BOOTM_STATE_OS_CMDLINE |
BOOTM_STATE_OS_BD_T | BOOTM_STATE_OS_PREP |
BOOTM_STATE_OS_FAKE_GO | BOOTM_STATE_OS_GO);
if (boot_fn == NULL && need_boot_fn) {
if (iflag)
enable_interrupts();
printf("ERROR: booting os '%s' (%d) is not supported\n",
genimg_get_os_name(images->os.os), images->os.os);
bootstage_error(BOOTSTAGE_ID_CHECK_BOOT_OS);
return 1;
}
/* Call various other states that are not generally used */
if (!ret && (states & BOOTM_STATE_OS_CMDLINE))
ret = boot_fn(BOOTM_STATE_OS_CMDLINE, argc, argv, images);
if (!ret && (states & BOOTM_STATE_OS_BD_T))
ret = boot_fn(BOOTM_STATE_OS_BD_T, argc, argv, images);
if (!ret && (states & BOOTM_STATE_OS_PREP)) {
ret = bootm_process_cmdline_env(images->os.os == IH_OS_LINUX);
if (ret) {
printf("Cmdline setup failed (err=%d)\n", ret);
ret = CMD_RET_FAILURE;
goto err;
}
ret = boot_fn(BOOTM_STATE_OS_PREP, argc, argv, images);
}
#ifdef CONFIG_TRACE
/* Pretend to run the OS, then run a user command */
if (!ret && (states & BOOTM_STATE_OS_FAKE_GO)) {
char *cmd_list = env_get("fakegocmd");
ret = boot_selected_os(argc, argv, BOOTM_STATE_OS_FAKE_GO,
images, boot_fn);
if (!ret && cmd_list)
ret = run_command_list(cmd_list, -1, flag);
}
#endif
/* Check for unsupported subcommand. */
if (ret) {
puts("subcommand not supported\n");
return ret;
}
/* Now run the OS! We hope this doesn't return */
if (!ret && (states & BOOTM_STATE_OS_GO))
ret = boot_selected_os(argc, argv, BOOTM_STATE_OS_GO,
images, boot_fn);
/* Deal with any fallout */
err:
if (iflag)
enable_interrupts();
if (ret == BOOTM_ERR_UNIMPLEMENTED)
bootstage_error(BOOTSTAGE_ID_DECOMP_UNIMPL);
else if (ret == BOOTM_ERR_RESET)
do_reset(cmdtp, flag, argc, argv);
return ret;
}
该函数的核心部分:
- bootm_load_os将kernel镜像加载到内存中。
- 调用do_bootm_linux启动kernel。
do_bootm_linux
int do_bootm_linux(int flag, int argc, char *const argv[],
bootm_headers_t *images)
{
/* No need for those on ARM */
if (flag & BOOTM_STATE_OS_BD_T || flag & BOOTM_STATE_OS_CMDLINE)
return -1;
if (flag & BOOTM_STATE_OS_PREP) {
boot_prep_linux(images);
return 0;
}
if (flag & (BOOTM_STATE_OS_GO | BOOTM_STATE_OS_FAKE_GO)) {
boot_jump_linux(images, flag);
return 0;
}
boot_prep_linux(images);
boot_jump_linux(images, flag);
return 0;
}
- boot_prep_linux负责准备传递给kernel的参数。
- boot_jump_linux负责跳转执行kernel代码。
boot_prep_linux
static void boot_prep_linux(bootm_headers_t *images)
{
char *commandline = env_get("bootargs");
if (IMAGE_ENABLE_OF_LIBFDT && images->ft_len) {
#ifdef CONFIG_OF_LIBFDT
debug("using: FDT\n");
if (image_setup_linux(images)) {
printf("FDT creation failed! hanging...");
hang();
}
#endif
} else if (BOOTM_ENABLE_TAGS) {
debug("using: ATAGS\n");
setup_start_tag(gd->bd);
if (BOOTM_ENABLE_SERIAL_TAG)
setup_serial_tag(¶ms);
if (BOOTM_ENABLE_CMDLINE_TAG)
setup_commandline_tag(gd->bd, commandline);
if (BOOTM_ENABLE_REVISION_TAG)
setup_revision_tag(¶ms);
if (BOOTM_ENABLE_MEMORY_TAGS)
setup_memory_tags(gd->bd);
if (BOOTM_ENABLE_INITRD_TAG) {
/*
* In boot_ramdisk_high(), it may relocate ramdisk to
* a specified location. And set images->initrd_start &
* images->initrd_end to relocated ramdisk's start/end
* addresses. So use them instead of images->rd_start &
* images->rd_end when possible.
*/
if (images->initrd_start && images->initrd_end) {
setup_initrd_tag(gd->bd, images->initrd_start,
images->initrd_end);
} else if (images->rd_start && images->rd_end) {
setup_initrd_tag(gd->bd, images->rd_start,
images->rd_end);
}
}
setup_board_tags(¶ms);
setup_end_tag(gd->bd);
} else {
printf("FDT and ATAGS support not compiled in - hanging\n");
hang();
}
board_prep_linux(images);
}
可以看到,u-boot使用的是tag的方式传参。共计分为以下几类tag:
- setup_serial_tag设定与板子序列号(64位)相关的参数。
- setup_commandline_tag设置命令行启动参数,参数来自环境变量"bootargs"。
- setup_revision_tag 设置修订版本。
- setup_memory_tags设置内存区块相关参数。
- setup_initrd_tag设置ramdisk相关的参数。
注:以上参数并非都是必要的。
boot_jump_linux
static void boot_jump_linux(bootm_headers_t *images, int flag)
{
#ifdef CONFIG_ARM64
void (*kernel_entry)(void *fdt_addr, void *res0, void *res1,
void *res2);
int fake = (flag & BOOTM_STATE_OS_FAKE_GO);
kernel_entry = (void (*)(void *fdt_addr, void *res0, void *res1,
void *res2))images->ep;
debug("## Transferring control to Linux (at address %lx)...\n",
(ulong) kernel_entry);
bootstage_mark(BOOTSTAGE_ID_RUN_OS);
announce_and_cleanup(fake);
if (!fake) {
#ifdef CONFIG_ARMV8_PSCI
armv8_setup_psci();
#endif
do_nonsec_virt_switch();
update_os_arch_secondary_cores(images->os.arch);
#ifdef CONFIG_ARMV8_SWITCH_TO_EL1
armv8_switch_to_el2((u64)images->ft_addr, 0, 0, 0,
(u64)switch_to_el1, ES_TO_AARCH64);
#else
if ((IH_ARCH_DEFAULT == IH_ARCH_ARM64) &&
(images->os.arch == IH_ARCH_ARM))
armv8_switch_to_el2(0, (u64)gd->bd->bi_arch_number,
(u64)images->ft_addr, 0,
(u64)images->ep,
ES_TO_AARCH32);
else
armv8_switch_to_el2((u64)images->ft_addr, 0, 0, 0,
images->ep,
ES_TO_AARCH64);
#endif
}
#else
unsigned long machid = gd->bd->bi_arch_number;
char *s;
void (*kernel_entry)(int zero, int arch, uint params);
unsigned long r2;
int fake = (flag & BOOTM_STATE_OS_FAKE_GO);
kernel_entry = (void (*)(int, int, uint))images->ep;
#ifdef CONFIG_CPU_V7M
ulong addr = (ulong)kernel_entry | 1;
kernel_entry = (void *)addr;
#endif
s = env_get("machid");
if (s) {
if (strict_strtoul(s, 16, &machid) < 0) {
debug("strict_strtoul failed!\n");
return;
}
printf("Using machid 0x%lx from environment\n", machid);
}
debug("## Transferring control to Linux (at address %08lx)" \
"...\n", (ulong) kernel_entry);
bootstage_mark(BOOTSTAGE_ID_RUN_OS);
announce_and_cleanup(fake);
if (IMAGE_ENABLE_OF_LIBFDT && images->ft_len)
r2 = (unsigned long)images->ft_addr;
else
r2 = gd->bd->bi_boot_params;
if (!fake) {
#ifdef CONFIG_ARMV7_NONSEC
if (armv7_boot_nonsec()) {
armv7_init_nonsec();
secure_ram_addr(_do_nonsec_entry)(kernel_entry,
0, machid, r2);
} else
#endif
kernel_entry(0, machid, r2);
}
#endif
}
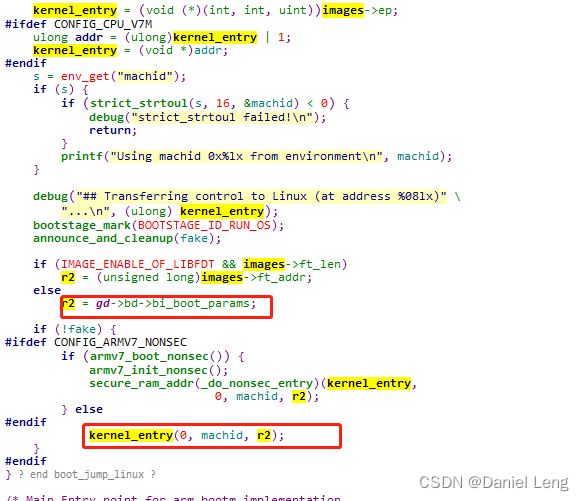
-
r2 = gd->bd->bi_boot_params; 是将TAG列表所在的内存地址赋值给通用寄存器R2。
-
kernel_entry(0, machid, r2); 跳转执行kernel的代码(自此uboot的使命完成,生命周期结束)。
综上,Uboot传递给linux kernel的参数是通过R2传递的。当linux kernel启动后,会从R2中拿到TAG列表的地址,然后将TAG参数解析出来使用。