目录
- 1. avl树的概念
- 2. 树结点的定义
- 3. 结点的插入
- 3.1 左单旋
- 3.2 右单旋
- 3.3 右左双旋
- 3.4 左右双旋
- 4. 结点的删除(了解)
- 5. 整体代码
1. avl树的概念
前面学习过二叉搜索树,理想状态下虽可以缩短查找的效率,但如果数据有序或接近有序依次插入后二叉搜索树将退化为单支树,查找元素相当于在顺序表中搜索元素,效率低下。
因此,两位俄罗斯的数学家G.M.Adelson-Velskii和E.M.Landis在1962年发明了一种解决上述问题的方法:当向二叉搜索树中插入新结点后,如果能保证每个结点的左右子树高度之差的绝对值不超过1(需要对树中的结点进行调整),即可降低树的高度,从而减少平均搜索长度。
一棵AVL树或者是空树,或者是具有以下性质的二叉搜索树:
- 它的左右子树都是AVL树
- 左右子树高度之差(简称平衡因子)的绝对值不超过1(-1/0/1)
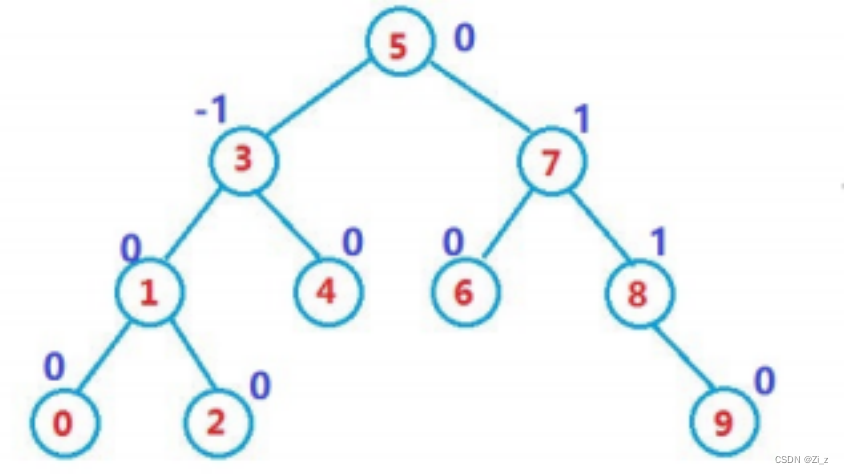
平衡因子的计算一般是右子树的高度-左子树的高度
因此AVL树也叫做二叉平衡树,若树上有n个结点,树的高度可保持在log2N,搜索的次数也就是它的高度次。
2. 树结点的定义
template<class K, class V>
struct AVLTreeNode {
AVLTreeNode(pair<const K, V>& kv)
:_kv(kv), _bf(0), _left(nullptr), _right(nullptr), _parent(nullptr)
{
}
pair<const K, V> _kv; //key/value模型
int _bf; //平衡因子
AVLTreeNode<K, V>* _left;
AVLTreeNode<K, V>* _right;
//除了左右指针外还要增加一个指向父节点的指针
//因为后续插入结点后需要向上调整祖先们的平衡因子
AVLTreeNode<K, V>* _parent;
};
3. 结点的插入
avl树插入的第一步和二叉搜索树是一致的,根据搜索树的性质选择一个合适的位置进行插入,不同的是插入完成后,树的平衡性可能会受到破坏,因此需要更新祖先们的平衡因子,若插入在左边parent的平衡因子-1,反之+1,更新后会有三种情况:
- 平衡因子==0
这种情况说明parent这颗(子)树的整体高度不变,因此不需要再沿着祖先们的路径往上进行更新。 - 平衡因子==1 || -1
这种情况说明parent这颗(子)树的高度发生了变化,因此需要继续沿着祖先们的路径往上进行更新。 - 平衡因子==2 || -2
这种情况说明parent这颗(子)树的高度发生变化的同时且不再满足平衡,需要对其进行旋转让其变得平衡。
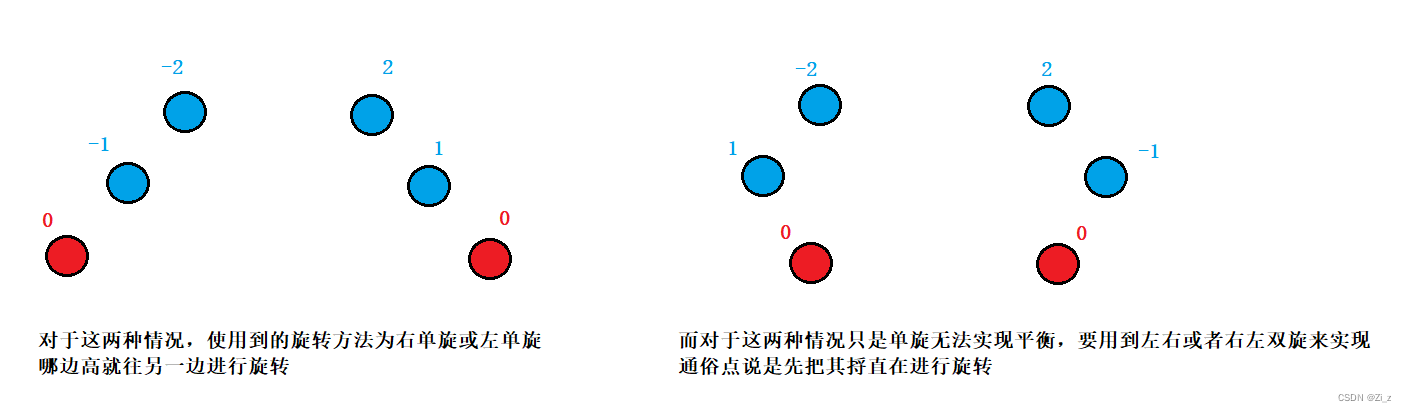
对于情况三,该如何进行旋转?这里需要分类讨论:
在旋转的时候需要注意的是:
- 旋转后依然保持它是搜索树。
- 变成平衡树的同时降低子树的高度。
3.1 左单旋
新节点插入较高右子树的右侧—右右:左单旋:
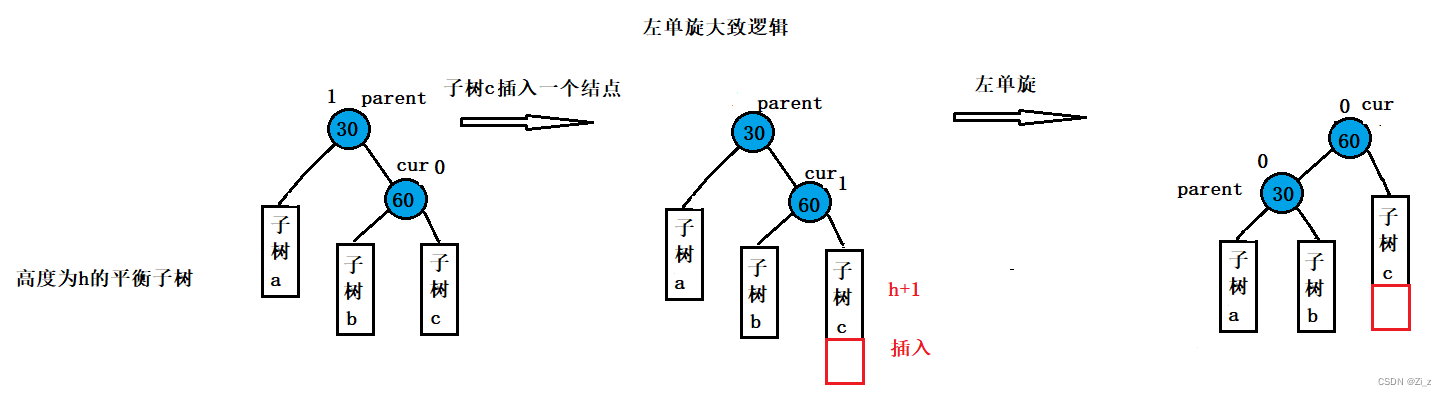
左旋的核心在于要把cur的左子树交给parent的右子树,然后parent作为cur的左子树,旋转完成后还需要修改对应结点父指针的指向和平衡因子。
代码实现:
void rotateLeft(Node* parent) {
//对于左单旋只与三个结点有关
//parent、cur(parent->_right)和cur->left
Node* cur = parent->_right;
Node* curleft = cur->_left;
//cur一定不为空而cur->left是有可能为空的
//因此需要特殊判断
if (curleft) {
//指向新parent
curleft->_parent = parent;
}
//核心操作
parent->_right = curleft;
cur->_left = parent;
//先保存parent的父节点后续会用到
//然后修改对应父节点的指向
Node* oldparent = parent->_parent;
parent->_parent = cur;
cur->_parent = oldparent;
//parent可能是根节点也可能是一颗子树
//若是根节点那么oldparent则为空
//cur为新的根
if (!oldparent) {
_root = cur;
}
//否则判断parent结点是oldparent的哪颗子树
//让其指向新的孩子cur
else {
if (oldparent->_left == parent) {
oldparent->_left = cur;
}
else {
oldparent->_right = cur;
}
}
//旋转完毕后与插入之前(子)树的高度是不变的,同时还填上了矮的那颗子树
//因此要修改cur和parent的平衡因子为0
cur->_bf = parent->_bf = 0;
}
3.2 右单旋
新节点插入较高左子树的左侧—左左:右单旋:
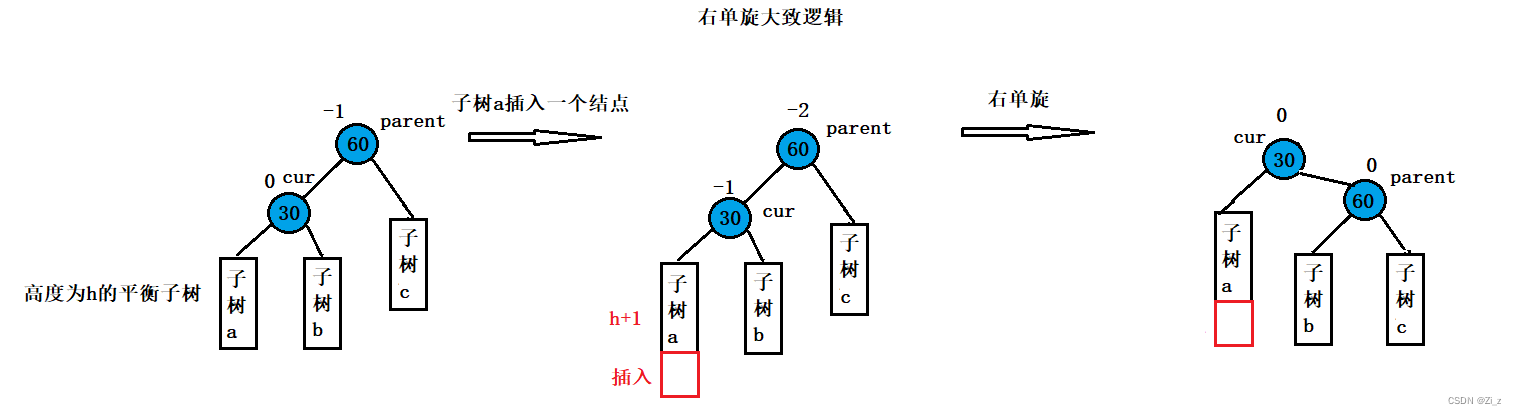
右单旋的逻辑与左单旋非常相似,该逻辑的核心操作在于要把cur的右子树交给parent的左子树,让parent作为cur的右子树,同时旋转完成后 修改对应结点父指针的指向和平衡因子。
代码实现:
void ratateRight(Node* parent) {
//同样只与三个结点有关
//parent、cur(parent->_left)和cur->_right
Node* cur = parent->_left;
Node* curright = cur->_right;
if (curright) {
curright->_parent = parent;
}
parent->_left = curright;
cur->_right = parent;
Node* oldparent = parent->_parent;
parent->_parent = cur;
cur->_parent = oldparent;
if (!oldparent) {
_root = cur;
}
else {
if (oldparent->_left == parent) {
oldparent->_left = cur;
}
else {
oldparent->_right = cur;
}
}
cur->_bf = parent->_bf = 0;
}
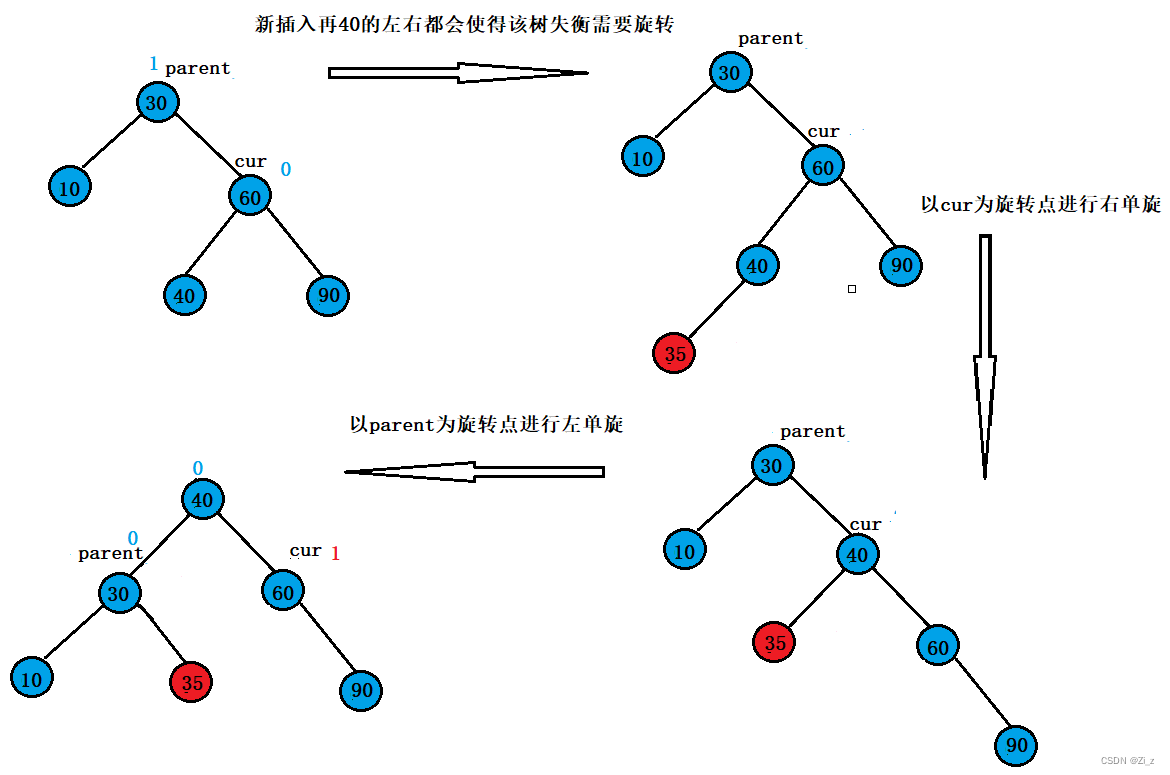
3.3 右左双旋
新节点插入较高右子树的左侧—右左:先右单旋再左单旋
单旋只能解决纯粹是一边高的场景(左左高或者右右高),对于下面这种场景单旋无法解决:
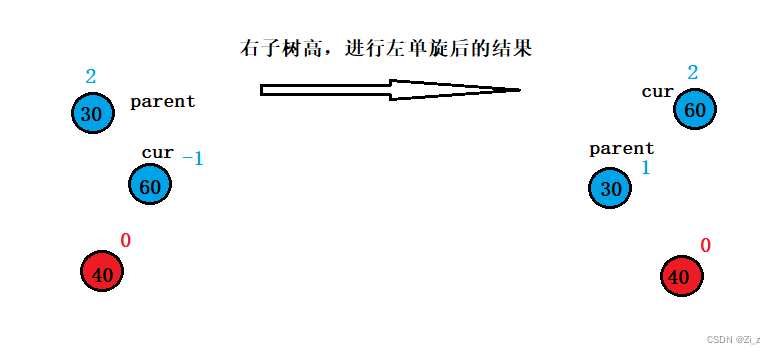
类似上述这种更为复杂的树结构也是同样的道理,因此要用到双旋解决。
抽象点说若需要旋转的那颗(子)树的结构呈一条直线,那么单旋就可以解决,而若为折线的情况,则要用双旋
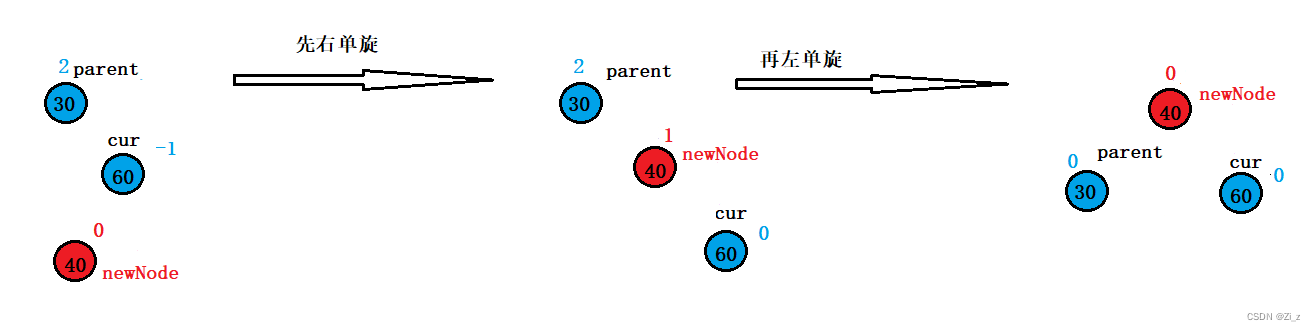
对于折线情况,能否先让其"变"成一条直线再进行单旋呢?这里的变就是第一次单旋,旋转为直线后再进行第二次单旋。
第一次旋转如何操作?对于上图的例子,其实就是先以cur为旋转点对cur和新插入的结点进行右单旋(对于这两个结点而言是左边高),捋直了后就变成了纯粹的一边高,此时再以parent为旋转点对parent和cur进行左单旋:
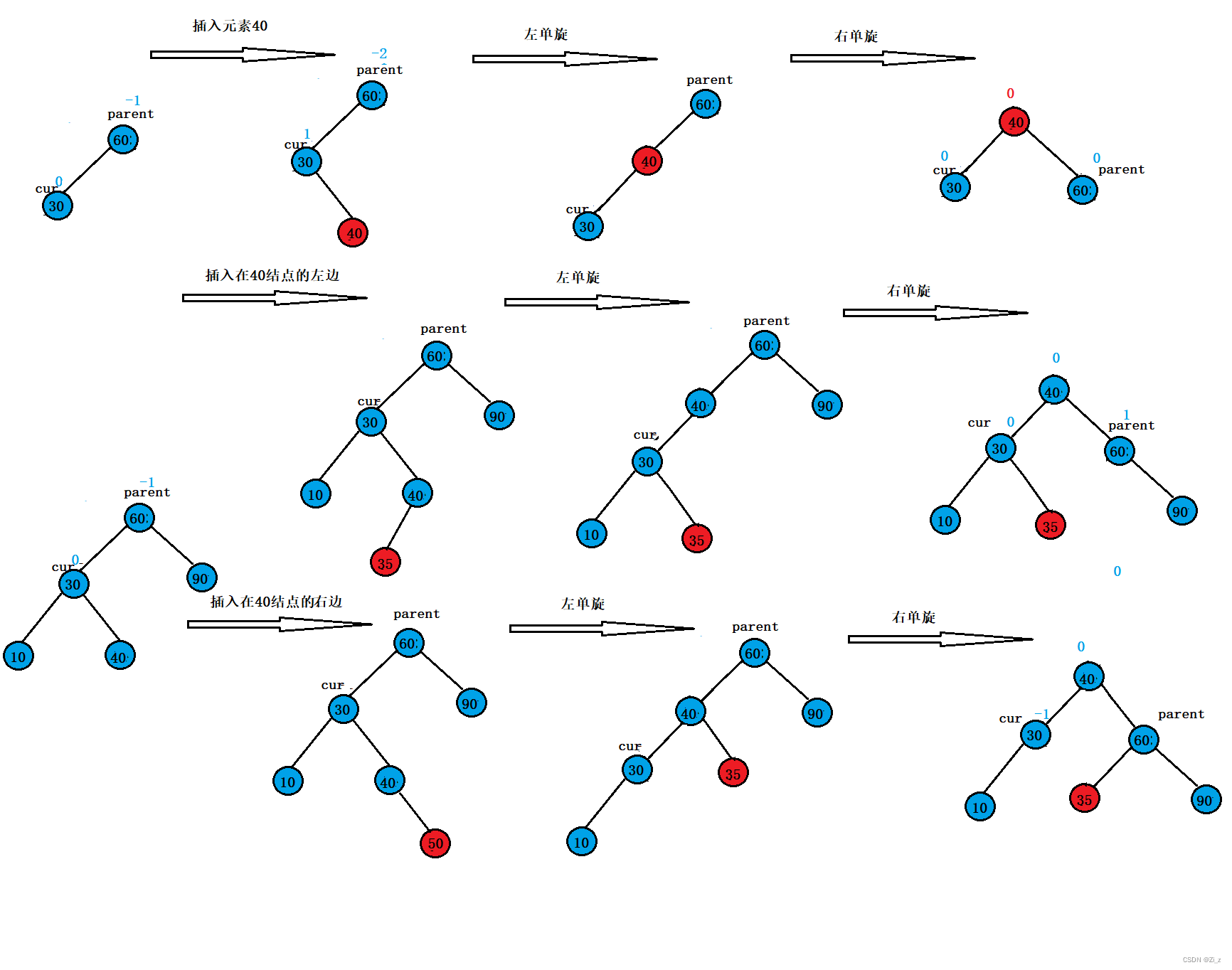
这是最简单的一种情况,稍微复杂点的树结构比如下图,也是需要通过双旋来解决:
若插入再40结点的右边时旋转后的结构会有什么不同呢?

可以发现的是若插入在40的左边时,旋转完成后新节点成了parent的右子树,而插入在右边时最终变成了cur的左子树,parent和cur分别为40这个结点的左右子树,40成了这棵树的根。
对于其它更为复杂的树结构,如下抽象图,解决方法也是同样的道理:
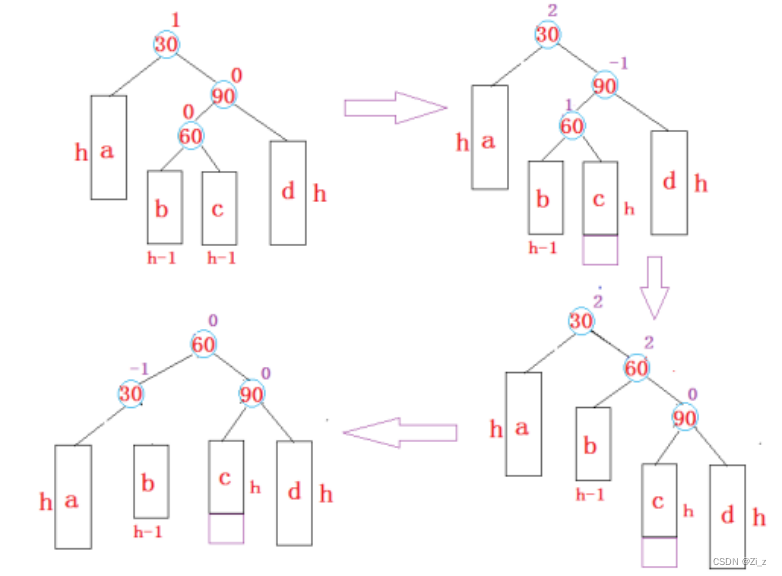
双旋结束后,还需要更新对应结点的平衡因子,根据上面的三个例子,parent和cur平衡因子会有三种情况:
- parent和cur都为0。
- parent为0,cur为1。
- parent为-1,cur为0。
如何区分的关键在于40这个结点是否是新增;在40结点的左边插入;在40结点的右插入。
若平衡因子是第一种情况,那么40是新增结点;若是第二种情况,那么是在40的左边插入新节点;最后一种情况是在40的右边插入新结点。
代码实现:
void rotatRightLeft(Node* parent) {
//先保存关键结点的平衡因子
Node* cur = parent->_right;
Node* curleft = cur->_left;
int bf = curleft->_bf;
//复用单旋
rotateRight(cur);
rotateLeft(parent);
//旋转后根据情况更新对应的平衡因子
//自己就是新增
if (bf == 0) {
parent->_bf = cur->_bf = curleft->_bf = 0;
}
//在左边插入
else if (bf == -1) {
parent->_bf = curleft->_bf = 0;
cur->_bf = 1;
}
//右边插入
else if (bf == 1) {
cur->_bf = curleft->_bf = 0;
parent->_bf = -1;
}
else {
assert(false);
}
}
3.4 左右双旋
新节点插入较高左子树的右侧—左右:先左单旋再右单旋
左右双旋的情况简单概括为如下三种:
对于左右双旋情况的整体分析是基本与右左双旋一致,直接上代码:
void rotatLeftRight(Node* parent) {
Node* cur = parent->_left;
Node* curright = cur->_right;
int bf = curright->_bf;
rotateLeft(cur);
rotateRight(parent);
if (bf == 0) {
parent->_bf = cur->_bf = curright->_bf = 0;
}
//在左边插入
else if (bf == -1) {
cur->_bf = curright->_bf = 0;
parent->_bf = 1;
}
//右边插入
else if (bf == 1) {
parent->_bf = curright->_bf = 0;
cur->_bf = -1;
}
else {
assert(false);
}
}
4. 结点的删除(了解)
因为AVL树也是二叉搜索树,可按照二叉搜索树的方式将节点删除,然后再更新平衡因子,只不错与删除不同的时,删除节点后的平衡因子更新,最差情况下一直要调整到根节点的位置,并且调整的过程相比于插入会更加复杂,所以稍微了解就好。
5. 整体代码
#pragma once
#include <iostream>
#include <assert.h>
#include <windows.h>
using namespace std;
template<class K, class V>
struct AVLTreeNode {
AVLTreeNode(const pair<const K, V>& kv)
:_kv(kv), _bf(0), _left(nullptr), _right(nullptr), _parent(nullptr)
{
}
pair<const K, V> _kv; //key/value模型
int _bf; //平衡因子
AVLTreeNode<const K, V>* _left;
AVLTreeNode<const K, V>* _right;
//除了左右指针外还要增加一个指向父节点的指针
//因为后续插入结点后需要向上调整祖先们的平衡因子
AVLTreeNode<const K, V>* _parent;
};
template<class K, class V>
class AVLTree {
typedef AVLTreeNode<const K, V> Node;
public:
bool insert(const pair<const K, V>& kv) {
//首先根据搜索树的性质找到一个合适的位置进行插入
if (!_root) {
_root = new Node(kv);
return true;
}
Node* cur = _root, *parent = _root;
while (cur) {
if (cur->_kv.first < kv.first) {
parent = cur;
cur = cur->_right;
}
else if (cur->_kv.first > kv.first) {
parent = cur;
cur = cur->_left;
}
else {
return false;
}
}
cur = new Node(kv);
if (parent->_kv.first < kv.first) {
parent->_right = cur;
}
else {
parent->_left = cur;
}
cur->_parent = parent;
//插入完毕后需要沿着祖先路径调整平衡因子
//最多调整到根
while (parent) {
if (parent->_left == cur) {
--parent->_bf;
}
else {
++parent->_bf;
}
//说明该树的高度不变无需继续往上调整
if (parent->_bf == 0) {
break;
}
//该树的高度发生了变化,需要往上继续调整
else if (parent->_bf == 1 || parent->_bf == -1) {
cur = parent;
parent = parent->_parent;
}
//此时该树高度失衡,需要进行旋转
else if (parent->_bf == 2 || parent->_bf == -2) {
//分别对几种旋转的情况进行判断
//右边高需要左单旋
if (parent->_bf == 2 && cur->_bf == 1) {
rotateLeft(parent);
}
//左边高需要右单旋
else if (parent->_bf == -2 && cur->_bf == -1) {
rotateRight(parent);
}
//右左双旋
else if (parent->_bf == 2 && cur->_bf == -1) {
rotatRightLeft(parent);
}
//左右双旋
else if (parent->_bf == -2 && cur->_bf == 1) {
rotatLeftRight(parent);
}
else {
assert(false);
}
break;
}
else {
assert(false);
}
}
return true;
}
void getSingleTreeHeight() {
_getSingleTreeHeight(_root);
}
private:
void _getSingleTreeHeight(Node* root) {
if (root) {
printf("树%d的高度为:%d, 左子树为%d,右子树为%d\n\n",
root->_kv.first, getHeight(root), getHeight(root->_left), getHeight(root->_right));
_getSingleTreeHeight(root->_left);
_getSingleTreeHeight(root->_right);
}
}
int getHeight(Node* root) {
if (!root) {
return 0;
}
int leftH = getHeight(root->_left);
int rightH = getHeight(root->_right);
return max(leftH, rightH) + 1;
}
void rotateLeft(Node* parent) {
//对于左单旋只与三个结点有关
//parent、cur(parent->_right)和cur->left
Node* cur = parent->_right;
Node* curleft = cur->_left;
//cur一定不为空而cur->left是有可能为空的
//因此需要特殊判断
if (curleft) {
//指向新parent
curleft->_parent = parent;
}
//核心操作
parent->_right = curleft;
cur->_left = parent;
//先保存parent的父节点后续会用到
//然后修改对应父节点的指向
Node* oldparent = parent->_parent;
parent->_parent = cur;
cur->_parent = oldparent;
//parent可能是根节点也可能是一颗子树
//若是根节点那么oldparent则为空
//cur为新的根
if (!oldparent) {
_root = cur;
}
//否则判断parent结点是oldparent的哪颗子树
//让其指向新的孩子cur
else {
if (oldparent->_left == parent) {
oldparent->_left = cur;
}
else {
oldparent->_right = cur;
}
}
//旋转完毕后与插入之前(子)树的高度是不变的,同时还填上了矮的那颗子树
//因此要修改cur和parent的平衡因子为0
cur->_bf = parent->_bf = 0;
}
void rotateRight(Node* parent) {
//右单旋的逻辑与左单旋非常相似
//
//同样只与三个结点有关
//parent、cur(parent->_left)和cur->_right
Node* cur = parent->_left;
Node* curright = cur->_right;
if (curright) {
curright->_parent = parent;
}
parent->_left = curright;
cur->_right = parent;
Node* oldparent = parent->_parent;
parent->_parent = cur;
cur->_parent = oldparent;
if (!oldparent) {
_root = cur;
}
else {
if (oldparent->_left == parent) {
oldparent->_left = cur;
}
else {
oldparent->_right = cur;
}
}
cur->_bf = parent->_bf = 0;
}
//右左双旋
void rotatRightLeft(Node* parent) {
//先保存关键结点的平衡因子
Node* cur = parent->_right;
Node* curleft = cur->_left;
int bf = curleft->_bf;
//复用单旋
rotateRight(cur);
rotateLeft(parent);
//旋转后根据情况更新对应的平衡因子
//自己就是新增
if (bf == 0) {
parent->_bf = cur->_bf = curleft->_bf = 0;
}
//在左边插入
else if (bf == -1) {
parent->_bf = curleft->_bf = 0;
cur->_bf = 1;
}
//右边插入
else if (bf == 1) {
cur->_bf = curleft->_bf = 0;
parent->_bf = -1;
}
else {
assert(false);
}
}
//左右双旋
void rotatLeftRight(Node* parent) {
Node* cur = parent->_left;
Node* curright = cur->_right;
int bf = curright->_bf;
rotateLeft(cur);
rotateRight(parent);
if (bf == 0) {
parent->_bf = cur->_bf = curright->_bf = 0;
}
//在左边插入
else if (bf == -1) {
cur->_bf = curright->_bf = 0;
parent->_bf = 1;
}
//右边插入
else if (bf == 1) {
parent->_bf = curright->_bf = 0;
cur->_bf = -1;
}
else {
assert(false);
}
}
Node* _root = nullptr;
};







![[动态规划] (九) 路径问题:LeetCode 64.最小路径和](https://img-blog.csdnimg.cn/img_convert/deacc81cae548943a4e5ed54144fd429.png)