前言

本次文章针对的是第四个视屏中的实践问题
肯定会有部分方法没有说到,比如高斯牛顿法,后面我会把此次视屏对应的作业写好,然后补充到此次博客!!
文章目录
- 前言
- 1.曲线拟合题目:
- 2.非线性最小二乘
- 2.1 黄金分割法(0.618法)
- 2.2 最速下降法
- 3.ceres库实现曲线拟合题目
- 3.1 安装ceres
- 3.2 代码及运行
- 4.g2o库实现曲线拟合题目
- 4.1 安装g2o
- 4.2 代码及运行
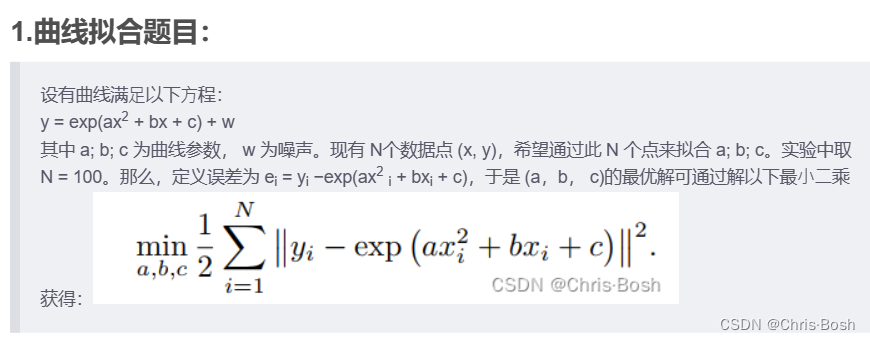
1.曲线拟合题目:
设有曲线满⾜以下⽅程:
y = exp(ax2 + bx + c) + w
其中 a; b; c 为曲线参数, w 为噪声。现有 N个数据点 (x, y),希望通过此 N 个点来拟合 a; b; c。实验中取N = 100。那么,定义误差为 ei = yi −exp(ax2 i + bxi + c),于是 (a,b, c)的最优解可通过解以下最⼩⼆乘获得:

使用ceres库和g2o库完成该题目
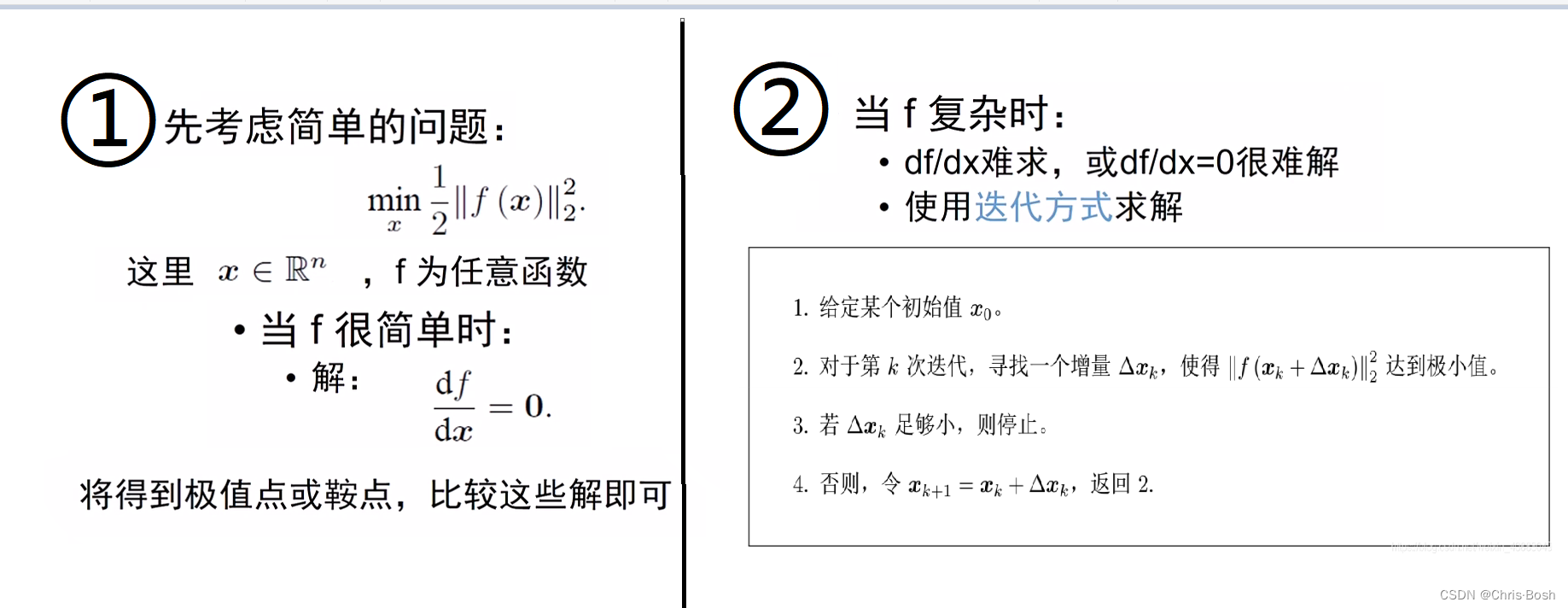
2.非线性最小二乘

这里涉及到很多非线性优化的知识,如果你对这些知识没有概念,一定要去中国最好的大学——哔哩哔哩大学先自学一下,什么是凸函数,凸规划,海塞矩阵,黄金分割法(0.618法),最速下降法,牛顿法,高斯牛顿法等等,否则这一块的知识你将无法理解!!!!
我会对某些方法做一些简单的说明:
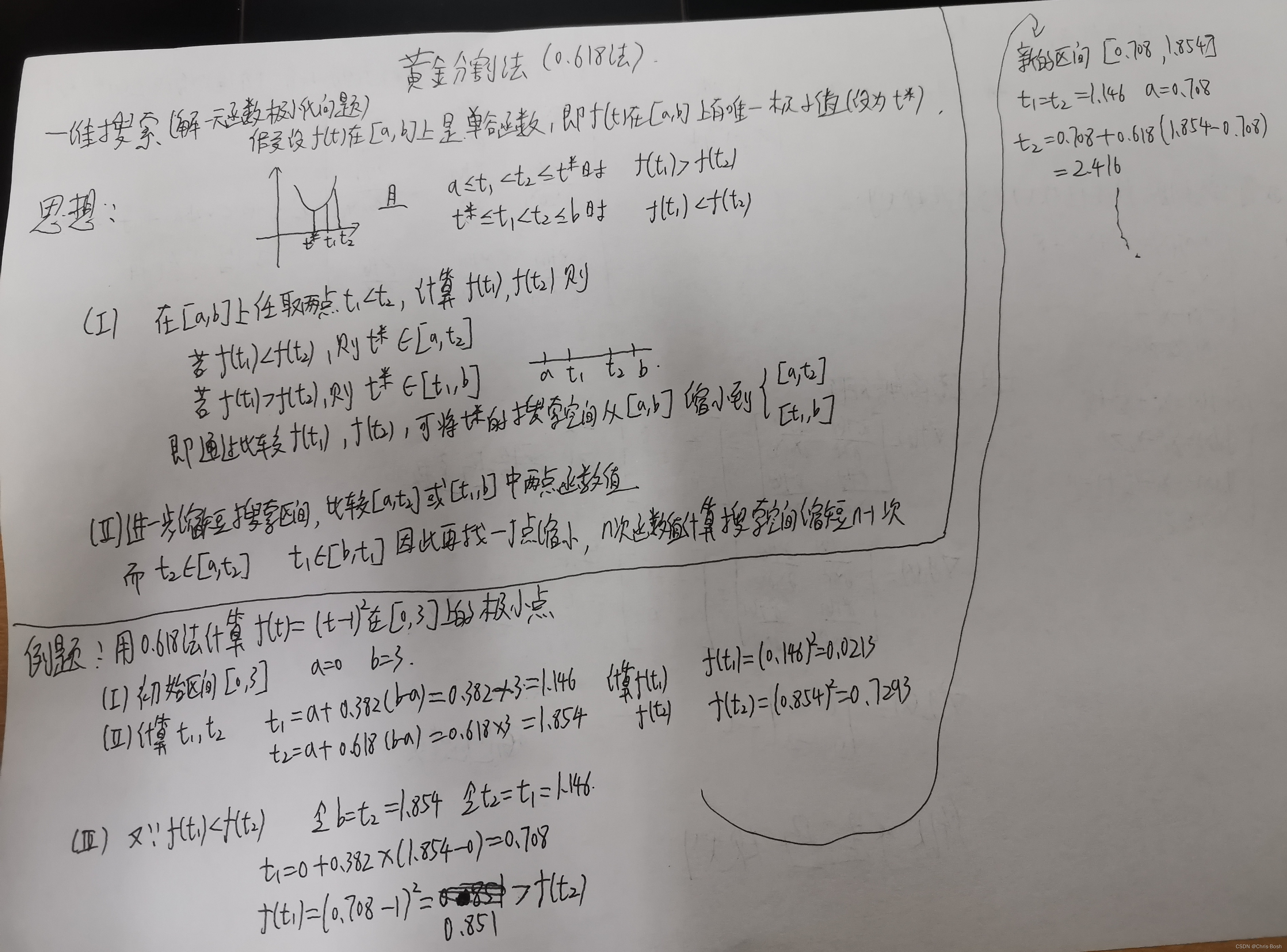
2.1 黄金分割法(0.618法)
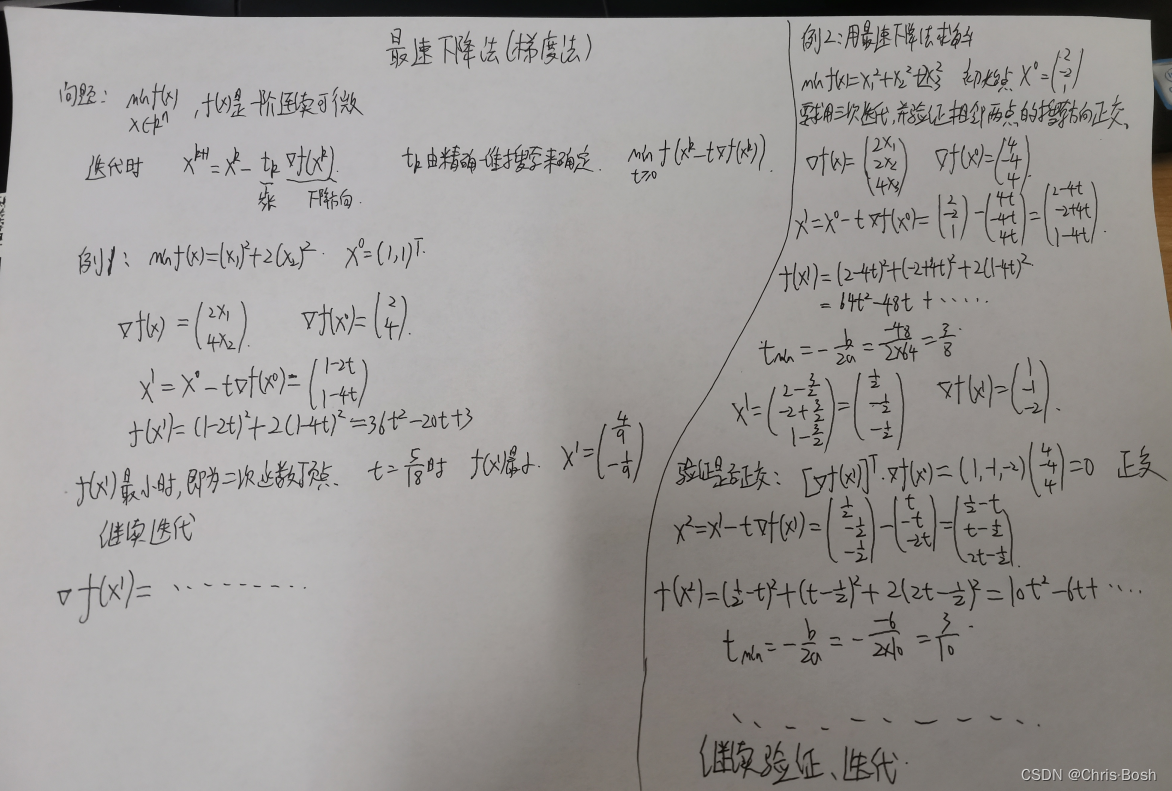
2.2 最速下降法
3.ceres库实现曲线拟合题目
Ceres库来自谷歌。是一个广泛使用的最小二乘问题求解库。
最小二乘问题:最小化观测数据的高维高斯分布形式的误差的平方,就可以得到最优的位姿状态。对于不方便求解的最小二乘问题,可以用迭代的方式,从一个初始值出发,不断地更新当前的优化变量,使目标函数下降。此时,只要找到迭代点的梯度方向即可,而无须寻找全局导函数为零的情况。(这个和神经网络里面的梯度下降方式一样欸!殊途同归的感觉)
3.1 安装ceres
//安装依赖项
sudo apt-get install liblapack-dev libsuitesparse-dev libgflags-dev
sudo apt-get install libgoogle-glog-dev libgtest-dev
sudo apt-get install libcxsparse3
wget ceres-solver.org/ceres-solver-1.14.0.tar.gz//下载后解压
//安装
cd ceres-solver-1.14.0
sudo mkdir build
cd build
cmake ..
make
sudo make install
3.2 代码及运行
main.cpp:
#include <iostream>
#include <opencv2/core/core.hpp>
#include <ceres/ceres.h>
#include <chrono>
using namespace std;
// 代价函数的计算模型
struct CURVE_FITTING_COST
{
CURVE_FITTING_COST ( double x, double y ) : _x ( x ), _y ( y ) {}
// 残差的计算
template <typename T>
bool operator() (
const T* const abc, // 模型参数,有3维
T* residual ) const // 残差
{
residual[0] = T ( _y ) - ceres::exp ( abc[0]*T ( _x ) *T ( _x ) + abc[1]*T ( _x ) + abc[2] ); // y-exp(ax^2+bx+c)
return true;
}
const double _x, _y; // x,y数据
};
int main ( int argc, char** argv )
{
double a=1.0, b=2.0, c=1.0; // 真实参数值
int N=100; // 数据点
double w_sigma=1.0; // 噪声Sigma值
cv::RNG rng; // OpenCV随机数产生器
double abc[3] = {0,0,0}; // abc参数的估计值
vector<double> x_data, y_data; // 数据
cout<<"generating data: "<<endl;
for ( int i=0; i<N; i++ )
{
double x = i/100.0;
x_data.push_back ( x );
y_data.push_back (
exp ( a*x*x + b*x + c ) + rng.gaussian ( w_sigma )
);
cout<<x_data[i]<<" "<<y_data[i]<<endl;
}
// 构建最小二乘问题
ceres::Problem problem;
for ( int i=0; i<N; i++ )
{
problem.AddResidualBlock ( // 向问题中添加误差项
// 使用自动求导,模板参数:误差类型,输出维度,输入维度,维数要与前面struct中一致
new ceres::AutoDiffCostFunction<CURVE_FITTING_COST, 1, 3> (
new CURVE_FITTING_COST ( x_data[i], y_data[i] )
),
nullptr, // 核函数,这里不使用,为空
abc // 待估计参数
);
}
// 配置求解器
ceres::Solver::Options options; // 这里有很多配置项可以填
options.linear_solver_type = ceres::DENSE_QR; // 增量方程如何求解
options.minimizer_progress_to_stdout = true; // 输出到cout
ceres::Solver::Summary summary; // 优化信息
chrono::steady_clock::time_point t1 = chrono::steady_clock::now();
ceres::Solve ( options, &problem, &summary ); // 开始优化
chrono::steady_clock::time_point t2 = chrono::steady_clock::now();
chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>( t2-t1 );
cout<<"solve time cost = "<<time_used.count()<<" seconds. "<<endl;
// 输出结果
cout<<summary.BriefReport() <<endl;
cout<<"estimated a,b,c = ";
for ( auto a:abc ) cout<<a<<" ";
cout<<endl;
return 0;
}
CMakeLists.txt:
cmake_minimum_required( VERSION 2.8 )
project( ceres_curve_fitting )
set( CMAKE_BUILD_TYPE "Release" )
set( CMAKE_CXX_FLAGS "-std=c++11 -O3" )
# 添加cmake模块以使用ceres库
list( APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake_modules )
# 寻找Ceres库并添加它的头文件
find_package( Ceres REQUIRED )
include_directories( ${CERES_INCLUDE_DIRS} )
# OpenCV
find_package( OpenCV REQUIRED )
include_directories( ${OpenCV_DIRS} )
add_executable( curve_fitting main.cpp )
# 与Ceres和OpenCV链接
target_link_libraries( curve_fitting ${CERES_LIBRARIES} ${OpenCV_LIBS} )
运行:
cd ceres_curve_fitting
mkdir build
cd build
cmake ..
make
./curve_fitting
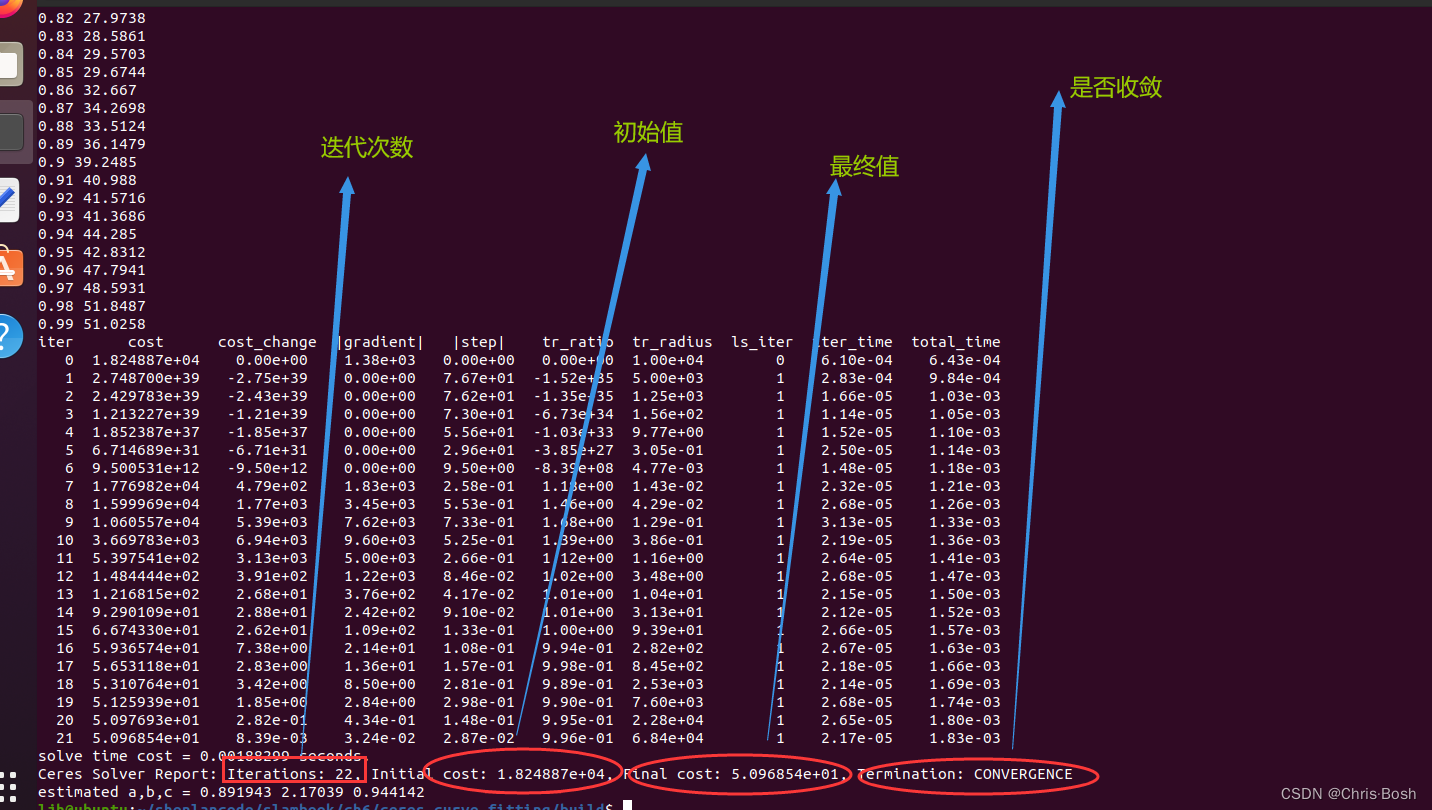
最后一行是估计值,估计值的准确度取决于噪音,也就是代码中(main.cpp)的 w_sigma,噪声越小越接近于实际值a=1,b=2,c=1
4.g2o库实现曲线拟合题目
4.1 安装g2o
这个必须用高博再3rdparty中给的,不然后面会一直出错!
//依赖项
sudo apt-get install libeigen3-dev
sudo apt-get install libsuitesparse-dev
sudo apt-get install qtdeclarative5-dev
sudo apt-get install qt5-qmake
sudo apt-get install libqglviewer-dev
//安装
cd g2o
mkdir build
cd build
sudo ldconfig
cmake ..
make
sudo make install
4.2 代码及运行
main.cpp:
#include <iostream>
#include <g2o/core/base_vertex.h>
#include <g2o/core/base_unary_edge.h>
#include <g2o/core/block_solver.h>
#include <g2o/core/optimization_algorithm_levenberg.h>
#include <g2o/core/optimization_algorithm_gauss_newton.h>
#include <g2o/core/optimization_algorithm_dogleg.h>
#include <g2o/solvers/dense/linear_solver_dense.h>
#include <Eigen/Core>
#include <opencv2/core/core.hpp>
#include <cmath>
#include <chrono>
using namespace std;
// 曲线模型的顶点,模板参数:优化变量维度和数据类型
class CurveFittingVertex: public g2o::BaseVertex<3, Eigen::Vector3d>
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
virtual void setToOriginImpl() // 重置
{
_estimate << 0,0,0;
}
virtual void oplusImpl( const double* update ) // 更新
{
_estimate += Eigen::Vector3d(update);
}
// 存盘和读盘:留空
virtual bool read( istream& in ) {}
virtual bool write( ostream& out ) const {}
};
// 误差模型 模板参数:观测值维度,类型,连接顶点类型
class CurveFittingEdge: public g2o::BaseUnaryEdge<1,double,CurveFittingVertex>
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
CurveFittingEdge( double x ): BaseUnaryEdge(), _x(x) {}
// 计算曲线模型误差
void computeError()
{
const CurveFittingVertex* v = static_cast<const CurveFittingVertex*> (_vertices[0]);
const Eigen::Vector3d abc = v->estimate();
_error(0,0) = _measurement - std::exp( abc(0,0)*_x*_x + abc(1,0)*_x + abc(2,0) ) ;
}
virtual bool read( istream& in ) {}
virtual bool write( ostream& out ) const {}
public:
double _x; // x 值, y 值为 _measurement
};
int main( int argc, char** argv )
{
double a=1.0, b=2.0, c=1.0; // 真实参数值
int N=100; // 数据点
double w_sigma=1.0; // 噪声Sigma值
cv::RNG rng; // OpenCV随机数产生器
double abc[3] = {0,0,0}; // abc参数的估计值
vector<double> x_data, y_data; // 数据
cout<<"generating data: "<<endl;
for ( int i=0; i<N; i++ )
{
double x = i/100.0;
x_data.push_back ( x );
y_data.push_back (
exp ( a*x*x + b*x + c ) + rng.gaussian ( w_sigma )
);
cout<<x_data[i]<<" "<<y_data[i]<<endl;
}
// 构建图优化,先设定g2o
typedef g2o::BlockSolver< g2o::BlockSolverTraits<3,1> > Block; // 每个误差项优化变量维度为3,误差值维度为1
Block::LinearSolverType* linearSolver = new g2o::LinearSolverDense<Block::PoseMatrixType>(); // 线性方程求解器
Block* solver_ptr = new Block( linearSolver ); // 矩阵块求解器
// 梯度下降方法,从GN, LM, DogLeg 中选
g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg( solver_ptr );
// g2o::OptimizationAlgorithmGaussNewton* solver = new g2o::OptimizationAlgorithmGaussNewton( solver_ptr );
// g2o::OptimizationAlgorithmDogleg* solver = new g2o::OptimizationAlgorithmDogleg( solver_ptr );
g2o::SparseOptimizer optimizer; // 图模型
optimizer.setAlgorithm( solver ); // 设置求解器
optimizer.setVerbose( true ); // 打开调试输出
// 往图中增加顶点
CurveFittingVertex* v = new CurveFittingVertex();
v->setEstimate( Eigen::Vector3d(0,0,0) );
v->setId(0);
optimizer.addVertex( v );
// 往图中增加边
for ( int i=0; i<N; i++ )
{
CurveFittingEdge* edge = new CurveFittingEdge( x_data[i] );
edge->setId(i);
edge->setVertex( 0, v ); // 设置连接的顶点
edge->setMeasurement( y_data[i] ); // 观测数值
edge->setInformation( Eigen::Matrix<double,1,1>::Identity()*1/(w_sigma*w_sigma) ); // 信息矩阵:协方差矩阵之逆
optimizer.addEdge( edge );
}
// 执行优化
cout<<"start optimization"<<endl;
chrono::steady_clock::time_point t1 = chrono::steady_clock::now();
optimizer.initializeOptimization();
optimizer.optimize(100);
chrono::steady_clock::time_point t2 = chrono::steady_clock::now();
chrono::duration<double> time_used = chrono::duration_cast<chrono::duration<double>>( t2-t1 );
cout<<"solve time cost = "<<time_used.count()<<" seconds. "<<endl;
// 输出优化值
Eigen::Vector3d abc_estimate = v->estimate();
cout<<"estimated model: "<<abc_estimate.transpose()<<endl;
return 0;
}
CMakeLists.txt:
cmake_minimum_required( VERSION 2.8 )
project( g2o_curve_fitting )
set( CMAKE_BUILD_TYPE "Release" )
set( CMAKE_CXX_FLAGS "-std=c++11 -O3" )
# 添加cmake模块以使用ceres库
list( APPEND CMAKE_MODULE_PATH ${PROJECT_SOURCE_DIR}/cmake_modules )
# 寻找G2O
find_package( G2O REQUIRED )
include_directories(
${G2O_INCLUDE_DIRS}
"/usr/include/eigen3"
)
# OpenCV
find_package( OpenCV REQUIRED )
include_directories( ${OpenCV_DIRS} )
add_executable( curve_fitting main.cpp )
# 与G2O和OpenCV链接
target_link_libraries( curve_fitting
${OpenCV_LIBS}
g2o_core g2o_stuff
)
运行:
cd g2o_curve_fitting
mkdir build
cd build
cmake ..
make
./curve_fitting

运行出的结果和ceres一样