文章目录
- 前言
- 一、两者不同之处
- 二、两者架构设计原则
- 总结
前言
AUTOSAR(AUTmotive Open System ARchitecture) 是汽车电子E/E系统发展的一个重要的节点。该标准是由包括BMW、DAIMLER、GM、TOYOTA、福特等主机厂和包括博世、大陆等供应商牵头成立的一个标准发展组织定义的一个开放参考的ECU软件架构。
最初目的是为了避免反复重复开发功能相同相近的软件模块。使用独立于系统的标准软件平台,可缩短产品上市时间,减少开发工作,并可从同一组组件中开发出更多产品,提高产品质量,实现软件和硬件的解耦
无论是AP AUTOSAR还是CP AUTOSAR,提出该标准最初总体目标是一致的:
1、更好的管理数量增多,功能复杂度增加的汽车ECU;
2、改善ECU软件质量和可靠性;
3、提升产品升级灵活性,缩短产品推向市场的时间;
4、可拓展的架构解决方案。
CP AUTOSAR与AP AUTOSAR标准提倡的内容是相同的:
1、汽车软件架构标准设计;
2、详细的底层软件模块设计;
3、汽车产品各域标准化数据描述;
4、适用于此架构的过程定义和软件工具链。
相同之处更多在于从宏观出发,落实到具体实现策略,则体现出不同之处。
一、两者不同之处
考量到两个软件架构主要的应用场景,对于芯片性能要求(实时性和算力):
CP AUTOSAR一般运行在8bit、16bit、32bit的微控制器(MCU)中,运行CP AUTOSAR 的芯片算力一般低于1000 DMIPs
AP AUTOSAR可以运行在64bit的高性能处理器(MPU)、CPU等中,,AP AUTOSAR也可以运行在虚拟硬件上,AP AUTOSAR可以运行在算力高于20000 DMIPs的芯片上。
CP AUTOSAR软件架构是分层的,有较为明显的上下层关系,详细可参考如下图所示:
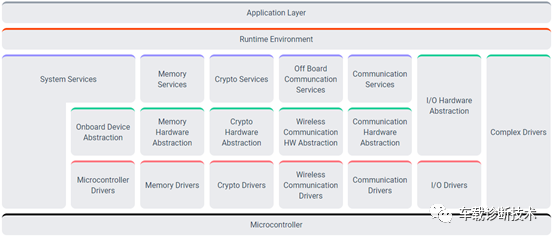
如上图,体现的分层架构实现不同的功能(从下往上):
1、微控制器层(HW);
2、基础软件层(BSW):
-
微控制器抽象层
-
ECU抽象层
-
服务层
-
复杂驱动
3、RTE层:体现了application的所有接口,软件模块间通过RTE交互,并通过RTE访问BSW;
4、Application层:不依赖于硬件。
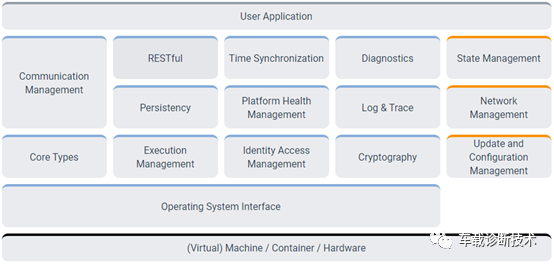
对比CP AUTOSAR,AP AUTOSAR一般是指ARA(AUTOSAR Runtime for Adaptive Applications),主要由两部分组成:
-
Foundation;
-
Service。
具体示意如下图所示:
注:
所有的模块都称为功能集群(Functional Clusters, FC),蓝色的FC属于Foundation的部分,橘色的部分属于Service的部分。无论是Foundation部分的FC,还是Service部分的FC,都不是上下层关系。
二、两者架构设计原则
CP AUTOSAR架构设计原则为:
-
CP AUTOSAR将与硬件相关的以及通用系统功能定义为BSW模块
-
应用功能定义为独立的软件组件SWC
-
RTE分离SWC和BSW
-
BSW可配置,并且可以被多个产品线的ECU重复使用
-
不开源
AP AUTOSAR架构设计原则为:
-
遵循面向服务的架构SOA设计范式(该理念非新创概念,原互联网中已使用成熟的应用理念,只是将应用场景变化到车载中)
-
充分利用其他领域软件成熟技术,重用软件市场成熟组件,缩短开发周期
-
充分利用各种开源软件(对比CP的不开源)
开发流程来看,CP与AP都主要都包括以下三个阶段:
设计阶段:设计ARXML;
代码生成:基于ARXML生成代码;
集成:集成Application,编译调试等
对于开发阶段,同样存在不同之处,详细如下::
AP AUTOSAR设计阶段,需要进行Service与Manifest的设计;CP AUTOSAR设计阶段,需要进行ECU配置设计,而AP没有ECU配置这个设计项。
CP 与AP开发流程如下图所示:
蓝色虚线框表示CP AUTOSAR的开发流程,绿色表示AP AUTOSAR的开发流程。
CP AUTOSAR是基于信号的通信,主要包括CAN、Lin、FlexRay等。
AP AUTOSAR是面向服务的通信,支持基于以太网的SOME/IP、IPC、RPC等。
CP AUTOSAR虽然可以支持SOME/IP,但是CP AUTOSAR中SOME/IP只不过是把Sender-Receiver的CAN通信转换成了Client-Server的以太网通信,整个通信链路仍是静态配置的,并不是真正的面向服务的通信。
PS: 传统嵌入式ECUs主要实现替代或增强电气系统的功能。这些ECUs中的软件主要根据输入的电气信号和来自车载网络上其他ECUs的输出信息来控制其输出的电气信号,它们在整个车辆寿命中往往不会发生明显变化。
而下一代的车辆运用,比如自动驾驶,将需求更复杂、更高计算资源的软件,并满足更严苛的integrity和security要求。这些软件需要实现比如环境感知、行为计划等功能,并需要将车辆融入到外部后台系统和基建系统中。随着外部系统的不断发展或改进的功能,要求车辆中的软件能够不断被更新。

Classic AUTOSAR(CP)满足了传统嵌入式ECU的需求,而上述ECU的需求无法满足。因此AUTOSAR指定了另外一个软件平台,即Adaptive AUTOSAR(AP)。AP更专注提供高性能计算和通讯机制,并提供灵活的软件配置,例如支持无线更新软件(FOTA)。
Adaptive AUTOSAR优势:
-
ECU更加智能:基于SOA通信使得AP中ECU可以动态的同其他ECU提供或获取服务,动态同其他ECU进行连接;
-
更强大计算能力:基于SOA架构使得AP能够更好支持多核、多ECU、多SOCs并行处理,提供更强大的计算能力;
-
更加安全:基于SOA架构使得AP中各个服务模块独立,可独立加载,IAM管理访问权限;
-
敏捷开发:Adaptive AUTOSAR服务不局限于部署在ECU本地可分布于车载网络中,使得系统模块可灵活部署,并可后期灵活独立更新(FOTA);
-
高通信带宽:基于Ethernet等高通信带宽的总线通信;
-
更易物联:基于以太网的SOA通信,更易实现无线、远程、云连接,部署Car-2-X应用;
-
系统兼容:通过SOME\IP等协议AP可以同CP/Non-AUTOSAR等ECU。
-
P AUTOSAR一般应用在对实时性要求高、对功能安全要求高、对算力要求较低的场景中,如引擎控制、制动系统等。
AP AUTOSAR一般应用在对实时性有一定要求、对功能安全有一定要求,对算力要求较高的场景中,如:
1、传感器融合处理、运行时动态更新
2、自动驾驶中:
-
与交通基础设施的通信
-
与云服务器进行通信
-
车身域
-
娱乐域
-
动力域
最近七八年,AUTOSAR软件架构这个topic一直很火,出现了很多基于该软件架构的解决方案供应商。靠着早入局,质量稳定等优势在业界大吃特吃。伴随着对协议解读越发通透,国内也出现了该方面的解决方案服务商,随着使用过程中不断优化(敏捷开发,快速迭代),早日实现关键技术不被卡脖子。话又说回来,特斯拉在电动车一骑绝尘,但是也没有采用AUTOSAR软件架构,基于自己团队软件能力,开发出属于自己的车载软件架构。车载软件嘛,只有基于自身软件架构实现其功能,又可以保证软件运行稳健性,就是王道。
总结
万里长征方起步,我辈需加倍努力。


![刷题记录:牛客NC17509挖沟[prim+kruskal算法详解]](https://img-blog.csdnimg.cn/img_convert/ae4f364e10243cf7b1f8600f3eda537b.png#pic_center)



![Max Sum Plus Plus(DP 滚动数组优化)[HDU - 1024]](https://img-blog.csdnimg.cn/9f3bba65e932424a9a52920f2534388c.png)