一文读懂最小相位滤波器和线性相位滤波器
- 1. 举例说明
- 2. 最小相位定义
- 2.1 最小相位多项式
- 2.2 最大相位滤波器
- 2.3 最小相位意味最快的衰减
- 2.4 最小相位/全通分解
- 3. 建立最小相位系统
前一篇博客 《一文读懂滤波器的线性相位,全通滤波器,群延迟》 详细解释了线性相位滤波器,与之对应的是最小相位滤波器,本文就最小相位滤波器和线性相位滤波器进行比较。并提出问题: 线性相位滤波器一定更适合音频吗? 先说结论:
- 线性相位滤波器
- 优点:不影响相位
- 缺点:pre-ringing效应,听觉上类似chirp的效果。并且具有较高的延迟。
- 最小相位滤波器
- 优点:延时低,相对于IIR对相位影响更小。
- 缺点:会带来相位的变化,只能用来补偿幅频响应,不能补偿相频响应。
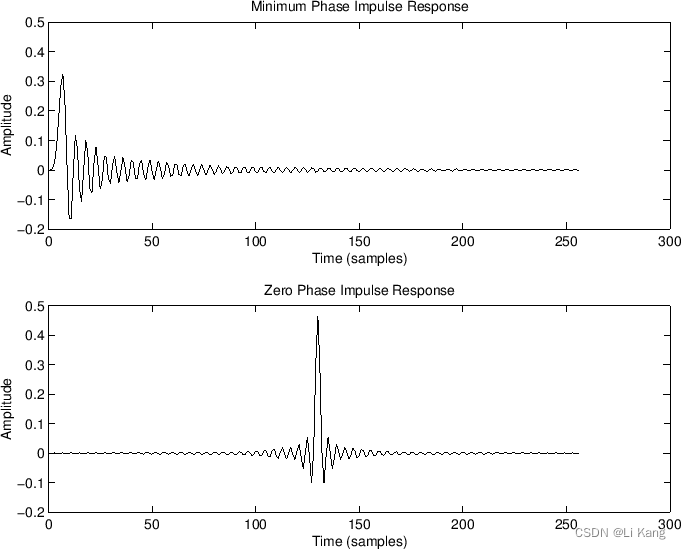
1. 举例说明
% ellipt.m - Compare minimum-phase and zero-phase
% lowpass impulse responses.
dosounds = 1;
N = 8; % filter order
Rp = 0.5; % passband ripple (dB)
Rs = 60; % stopband ripple (-dB)
Fs = 8192; % default sampling rate (Windows Matlab)
Fp = 2000; % passband end
Fc = 2200; % stopband begins [gives order 8]
Ns = 4096; % number of samples in impulse responses
[B,A] = nellip(Rp, Rs, Fp/(0.5*Fs), Fc/(0.5*Fs)); % Octave
% [B,A] = ellip(N, Rp, Rs, Fp/(0.5*Fs)); % Matlab
% Minimum phase case:
imp = [1,zeros(1,Ns/2-1)]; % or 'h1=impz(B,A,Ns/2-1)'
h1 = filter(B,A,imp); % min-phase impulse response
hmp = filter(B,A,[h1,zeros(1,Ns/2)]); % apply twice
% Zero phase case:
h1r = fliplr(h1); % maximum-phase impulse response
hzp = filter(B,A,[h1r,zeros(1,Ns/2)]); % min*max=zp
% hzp = fliplr(hzp); % not needed here since symmetric
% elliptplots; % plot impulse- and amplitude-responses
% Let's hear them!
while(dosounds)
sound(hmp,Fs);
pause(0.5);
sound(hzp,Fs);
pause(1);
end
2. 最小相位定义
2.1 最小相位多项式
2.2 最大相位滤波器
对于一个稳定的线性时不变系统,如果它的所有零点都在单位圆外,则该系统被称为最大相位。最大相位的例子就是上一篇博客中提到的纯延迟和全通滤波器。
- 纯延迟,传递函数为 H ( z ) = z − n H(z) = z^{-n} H(z)=z−n,其所有极点都在 z = 0 z=0 z=0处,而零点都在 z = ∞ z=\infty z=∞
- 全通滤波器,传递函数为
H ( z ) = c + z − 1 1 + c z − 1 H(z) =\frac{c + z^{-1}}{1 + cz^{-1}} H(z)=1+cz−1c+z−1 c = t a n ( π ∗ f c / f s ) − 1 t a n ( π ∗ f c / f s ) + 1 c=\frac{tan(\pi*fc/fs) - 1}{tan(\pi*fc/fs) + 1} c=tan(π∗fc/fs)+1tan(π∗fc/fs)−1其中fc为截止频率,fs为采样频率,其中参数 c c c范围为 (-1.0,1.0)。因此所有的极点都在单位圆内,而所有零点都在单位圆外,是最大相位滤波器。