结论:开发ros不一定要买树莓派,但是买一个会更方便,市场价410元/块;
开发ros机器人的时候,分为上位机和下位机2个控制中心,
其中下位机基本就是用STM32控制一个驱动电机。负责这个运动方向和速度。(我是这么猜的)
上位机使用树莓派的时候板子上面可以连接摄像头,雷达等。
连接上位机和下位机的方式是STM32通过串口通过一个串口转TTL模块(10块钱一个)连接到普通电脑的USB接口);可以看到如果只是控制下位机,树莓派只是相当于一台普通电脑,唯一区别就是小,所以可以放在机器人上面。
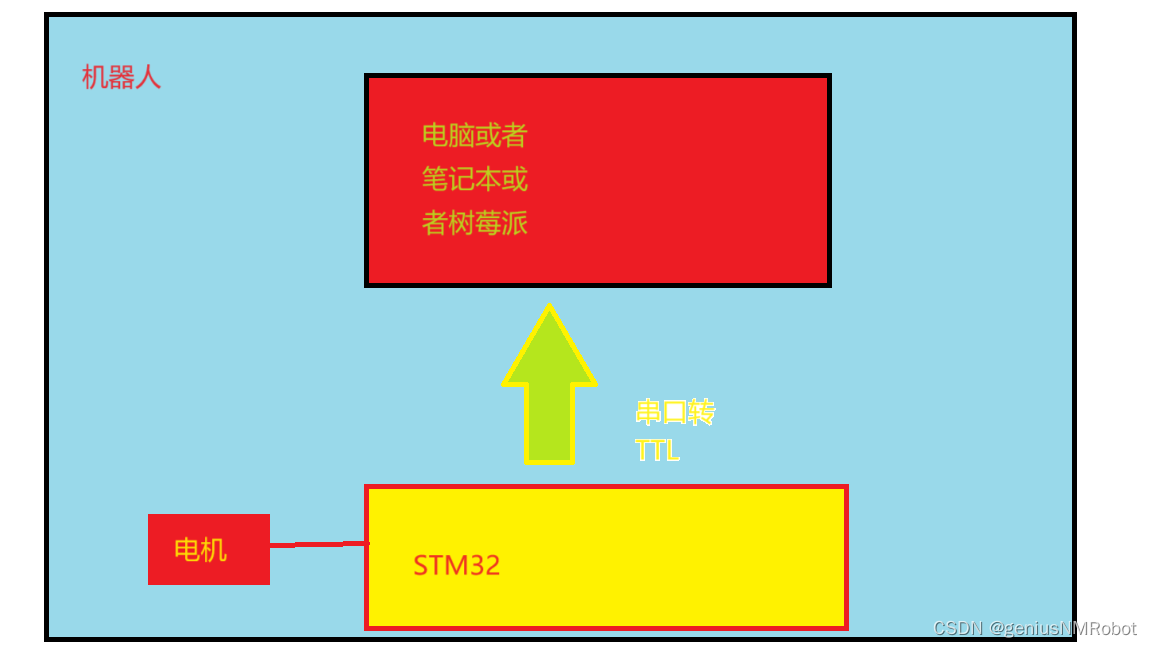
假设不适用树莓派你就用笔记本电脑的USB接口----》USB转串口模块(10块钱)-----》STM32单片机串口。就这样使用就可以了
如果只是这样简单的连接上位机与下位机,根本不用学习树莓派的编程,因为没有用到树莓派的GPIO---》我们没有用引脚对吧。反正我没用