一、前言
最近在准备毕业论文,研究了一下主流的多目标算法,对于NSGA-II,网上大部分代码是全部是面向过程来实现的,本人更喜欢采用面向对象的方式,故采用python面向对象实现了一个示例,实现了对于二元多目标问题的求解。
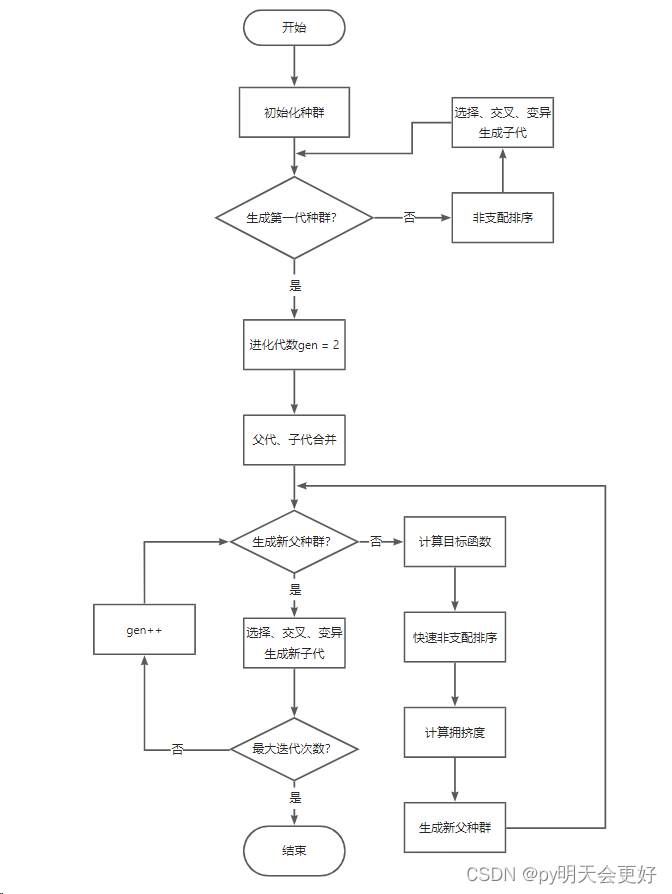
二、算法基本流程
三、核心思想
1、非支配排序
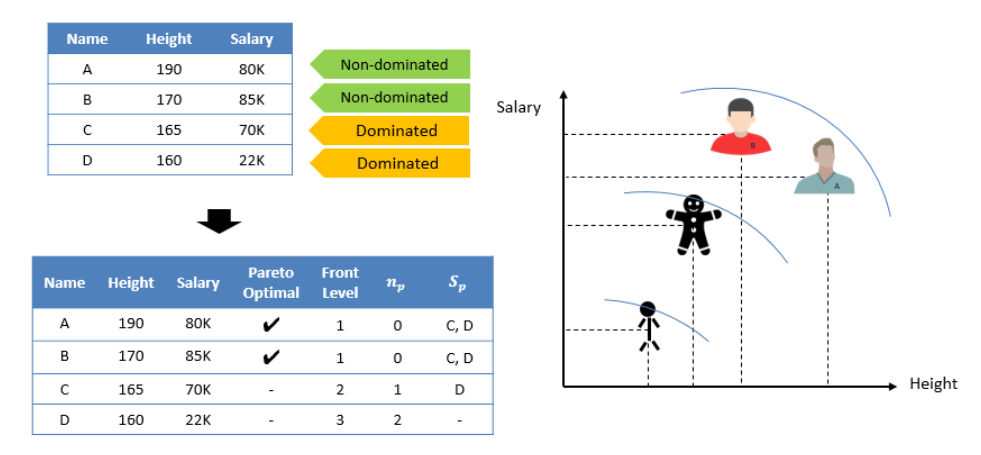
这个简单的例子说明了帕累托最优的概念。上面我们有4个成员A, B, C和D,有两个特征:身高和工资。现在,如果我们同时比较他们的身高和薪水,我们会发现这不是很直观,因为他们有多个目标。
既然这两个目标越大越好,我们可以简单地对它们进行比较。首先,我们观察到A和B都比C和D多,所以我们说A和B在身高和薪水上“支配”C和D。同理,C支配D,D可被A,B,C支配。
A和B呢?A比B高,但是工资低。相反,B面临着同样的情况。我们称这种情况为“非支配”。 如果我们能找到一组解它们不互相支配,也不受其他解支配,我们称之为"帕累托最优"解。在上面的例子中,A和B都在帕累托最优前沿。
几个概念:
非支配解:假设任何二解S1 及S2 对所有目标而言,S1均优于S2,则我们称S1 支配S2,若S1 的解没有被其他解所支配,则S1 称为非支配解(不受支配解),也称Pareto解(帕雷托解)
支配解:若解S2的所有目标均劣于S1,则称S1优于S2,也称S1支配S2,S2为受支配解。
Pareto前沿面:找到所有Pareto解之后,这些解组成的平面叫做Pareto前沿面(Non-dominated front)。在目标函数较多时,前沿面通常为超曲面。
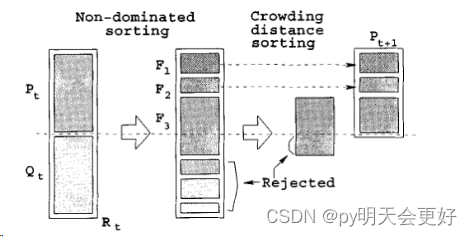
2、拥挤度
通俗的来讲,当需要舍弃某一rank平面的部分节点时,由于同一平面中的所有节点rank相同,不能通过rank来舍弃,而是要通过拥挤度来舍弃,以上就是拥挤度的作用。
算法更倾向于稀疏的点,也就是让节点更可能的分散,可以有效地方式早熟和过拟合现象
3、精英选择策略
每次都将父类与子类想结合,依次采用非支配排序、计算拥挤度来选择父代。
四、python实现
github: 源代码地址
"""
author: pym
time: 2023.10.29
ide: pycharm2
"""
from collections import defaultdict
import numpy as np
import random
import matplotlib.pyplot as plt
import math
class Individual(object):
def __init__(self):
self.solution = None # 实际为nparray类型,方便四则运算
self.objective = defaultdict()
self.n = 0 # 解p被几个解支配
self.rank = 0 # 解p所在层数
self.S = [] # 解p支配解的集合
self.distance = 0 # 拥挤度距离
def bound_process(self, bound_min, bound_max):
"""
对解向量 solution 中的每个分量进行定义域判断;超过最大值赋为最大值
:param bound_min: 定义域下限
:param bound_max: 定义域上限
:return:
"""
for i, item in enumerate(self.solution):
if item > bound_max:
self.solution[i] = bound_max
elif item < bound_min:
self.solution[i] = bound_min
def calculate_objective(self, objective_fun):
"""
计算目标值
:param objective_fun: 目标函数
:return:
"""
self.objective = objective_fun(self.solution)
def __lt__(self, other):
"""
重载小于号,只有当solution中全部小于对方,才判断小于
:param other: 比较的个体
:return: 1:小于 0:大于
"""
v1 = list(self.objective.values())
v2 = list(other.objective.values())
for i in range(len(v1)):
if v1[i] > v2[i]:
return 0
return 1
def fast_non_dominated_sort(P):
"""
非支配排序
:param P: 种群P
:return: F:分层结果,返回值类型为dict,键为层号,值为list(该层中的个体)
"""
F = defaultdict(list)
for p in P:
p.S = []
p.n = 0
for q in P:
if p < q: # p支配q
p.S.append(q)
elif q < p: # q支配p
p.n += 1
if p.n == 0:
p.rank = 1
F[1].append(p)
i = 1
while F[i]:
Q = []
for p in F[i]:
for q in p.S:
q.n -= 1
if q.n == 0:
q.rank = i + 1
Q.append(q)
i += 1
F[i] = Q
return F
def crowding_distance_assignment(L):
"""
计算拥挤度
:param L: F[i],是个list,为第i层的节点集合
:return:
"""
l = len(L)
# 初始化距离
for i in range(l):
L[i].distance = 0
# 遍历每个目标方向(有几个优化目标,就有几个目标方向)
for m in L[0].objective.keys():
L.sort(key=lambda x: x.objective[m]) # 使用objective值排序
L[0].distance = float('inf')
L[l - 1].distance = float('inf')
f_max = L[l - 1].objective[m]
f_min = L[0].objective[m]
# 当某一个目标方向上的最大值和最小值相同时,会出现除0错误
try:
for i in range(1, l - 1):
L[i].distance = L[i].distance + (L[i + 1].objective[m] - L[i - 1].objective[m]) / (f_max - f_min)
except Exception:
print(str(m) + "目标方向上,最大值为:" + str(f_max) + " 最小值为:" + str(f_min))
def binary_tornament(ind1, ind2):
"""
二元锦标赛:先选非支配排序靠前的,再选拥挤度低(即距离远);如果都不行,则随机
:param ind1: 个体1
:param ind2: 个体1
:return: 返回较优的个体
"""
if ind1.rank != ind2.rank:
return ind1 if ind1.rank < ind2.rank else ind2
elif ind1.distance != ind2.distance:
return ind1 if ind1.distance > ind2.distance else ind2
else:
return ind1
def crossover_mutation(parent1, parent2, eta, bound_min, bound_max, objective_fun):
"""
交叉:二进制交叉算子(SBX),变异:多项式变异(PM)
:param parent1: 父代1
:param parent2: 父代2
:param eta: 变异参数,越大则后代个体越逼近父代
:return:
"""
poplength = len(parent1.solution) # 解向量维数
# 初始化两个后代个体
offspring1 = Individual()
offspring2 = Individual()
offspring1.solution = np.empty(poplength)
offspring2.solution = np.empty(poplength)
# 二进制交叉
for i in range(poplength):
rand = random.random()
if rand < 0.5:
beta = (rand * 2) ** (1 / (eta + 1))
else:
beta = (1 / (2 * (1 - rand)))**(1 / (eta + 1))
offspring1.solution[i] = 0.5 * ((1 + beta) * parent1.solution[i] + (1 - beta) * parent2.solution[i])
offspring2.solution[i] = 0.5 * ((1 - beta) * parent1.solution[i] + (1 + beta) * parent2.solution[i])
# 多项式变异
for i in range(poplength):
mu = random.random()
if mu < 0.5:
delta = 2 * mu ** (1 / (eta + 1))
else:
delta = (1 - (2 * (1 - mu)) ** (1 / (eta + 1)))
# 只变异一个
offspring1.solution[i] = offspring1.solution[i] + delta
offspring1.bound_process(bound_min, bound_max)
offspring2.bound_process(bound_min, bound_max)
offspring1.calculate_objective(objective_fun)
offspring2.calculate_objective(objective_fun)
return [offspring1, offspring2]
def make_new_pop(P, eta, bound_min, bound_max, objective_fun):
"""
选择交叉变异获得新后代
:param P: 父代种群
:param eta: 变异参数,越大则后代个体越逼近父代
:param bound_min: 定义域下限
:param bound_max: 定义域上限
:param objective_fun: 目标函数
:return: 子代种群
"""
popnum = len(P) # 种群个数
Q = []
# 二元锦标赛选择
for i in range(int(popnum / 2)):
# 从种群中随机选择两个个体,进行二元锦标赛,选择一个parent
i = random.randint(0, popnum - 1)
j = random.randint(0, popnum - 1)
parent1 = binary_tornament(P[i], P[j])
parent2 = parent1
while (parent1.solution == parent2.solution).all(): # 小细节all
i = random.randint(0, popnum - 1)
j = random.randint(0, popnum - 1)
parent2 = binary_tornament(P[i], P[j])
Two_offspring = crossover_mutation(parent1, parent2, eta, bound_min, bound_max, objective_fun)
Q.append(Two_offspring[0])
Q.append(Two_offspring[1])
return Q
def KUR(x):
"""
计算各个目标方向上的目标值
:param x: 解向量
:return: 字典:各个方向上的目标值(key:目标方向;value:目标值)
"""
f = defaultdict(float)
poplength = len(x)
f[1] = 0
f[2] = 0
for i in range(poplength - 1):
f[1] = f[1] + (-10) * math.exp((-0.2) * (x[i] ** 2 + x[i + 1] ** 2) ** 0.5)
for i in range(poplength):
f[2] = f[2] + abs(x[i]) ** 0.8 + 5 * math.sin(x[i] ** 3)
return f
def plot_P(P):
"""
给种群绘图
:param P: 种群集合
:return:
"""
X = []
Y = []
for ind in P:
X.append(ind.objective[1])
Y.append(ind.objective[2])
plt.xlabel('F1')
plt.ylabel('F2')
plt.scatter(X, Y)
def main():
# 初始化参数
generations = 250 # 迭代次数
popnum = 100 # 种群大小
eta = 1 # 变异分布参数
poplength = 3 # 单个个体解向量的维数
bound_min = -5
bound_max = 5
objective_fun = KUR
# 生成第一代种群
P = []
for i in range(popnum):
P.append(Individual())
P[i].solution = np.random.rand(poplength) * (bound_max - bound_min) + bound_min
P[i].bound_process(bound_min, bound_max) # 越界处理
P[i].calculate_objective(objective_fun) # 计算目标值
# 快速非支配排序
fast_non_dominated_sort(P)
Q = make_new_pop(P, eta, bound_min, bound_max, objective_fun)
P_t = P # 当前这一代的父代种群
Q_t = Q # 当前这一代的子代种群
for gen_cur in range(generations):
R_t = P_t + Q_t
F = fast_non_dominated_sort(R_t)
P_n = [] # 即为P_t+1,表示下一代的父代
i = 1
# 依次将最高级别的支配平面中的节点放入到P_n中,之后更新非支配,直到达到要求的规模
while len(P_n) + len(F[i]) < popnum:
crowding_distance_assignment(F[i])
P_n += F[i]
i += 1
# 按照支配排序选完之后,再按照拥挤度来选择
F[i].sort(key=lambda x: x.distance)
P_n = P_n + F[i][:popnum - len(P_n)]
Q_n = make_new_pop(P_n, eta, bound_min, bound_max, objective_fun)
# 将下一届的父代和子代成为当前的父代和子代
P_t = P_n
Q_t = Q_n
# 可视化
plt.clf()
plt.title("current generation: " + str(gen_cur + 1))
plot_P(P_t)
plt.pause(0.1)
plt.show()
return 0
if __name__ == "__main__":
main()