目录
- 0 专栏介绍
- 1 PID控制基本原理
- 2 基于PID的路径跟踪
- 3 仿真实现
- 3.1 ROS C++实现
- 3.2 Python实现
- 3.3 Matlab实现
0 专栏介绍
🔥附C++/Python/Matlab全套代码🔥课程设计、毕业设计、创新竞赛必备!详细介绍全局规划(图搜索、采样法、智能算法等);局部规划(DWA、APF等);曲线优化(贝塞尔曲线、B样条曲线等)。
🚀详情:图解自动驾驶中的运动规划(Motion Planning),附几十种规划算法
1 PID控制基本原理
PID控制是一种常用的经典控制算法,其应用背景广泛,例如
- 工业自动化控制:温度控制、压力控制、流量控制、液位控制等过程控制系统多采用PID闭环,可以帮助维持系统参数在设定值附近,以提高生产过程的稳定性和效率;
- 机械工程:PID算法可用于实现精确的运动控制,包括控制位置、速度和力。这包括机器人控制、电机控制、汽车巡航控制等;
- 农业自动化:PID算法可用于控制温室环境,包括温度、湿度和光照,以促进植物的生长和提高农业生产;
- …
PID代表比例(Proportional)、积分(Integral)和微分(Derivative),它通过根据误差信号的大小和变化率来调整控制器的输出,以使系统的输出尽可能接近期望值,其控制框图如下所示

连续型PID控制律如下
u ( t ) = K p e ( t ) + K i ∫ t 0 t e ( τ ) d τ + K d e ˙ ( t ) u\left( t \right) =K_pe\left( t \right) +K_i\int_{t_0}^t{e\left( \tau \right) \mathrm{d}\tau}+K_d\dot{e}\left( t \right) u(t)=Kpe(t)+Ki∫t0te(τ)dτ+Kde˙(t)
其中 K p K_p Kp、 K i K_i Ki、 K d K_d Kd分别称为比例、积分与微分增益系数
位置式离散型PID控制律如下
u ( k ) = K p e ( k ) + K i ∑ i = 0 k e ( i ) Δ t + K d ( e ( k ) − e ( k − 1 ) ) / Δ t u\left( k \right) =K_pe\left( k \right) +K_i\sum_{i=0}^k{e\left( i \right) \varDelta t}+K_d{{\left( e\left( k \right) -e\left( k-1 \right) \right)}/{\varDelta t}} u(k)=Kpe(k)+Kii=0∑ke(i)Δt+Kd(e(k)−e(k−1))/Δt
由于位置式PID算法需要计算累计偏差,占用存储单元,可以通过
u ( k ) − u ( k − 1 ) u\left( k \right) -u\left( k-1 \right) u(k)−u(k−1)
计算增量式PID控制律
Δ u ( k ) = K p Δ e ( k ) + K i e ( k ) Δ t + K d ( Δ e ( k ) − Δ e ( k − 1 ) ) / Δ t \varDelta u\left( k \right) =K_p\varDelta e\left( k \right) +K_ie\left( k \right) \varDelta t+K_d{{\left( \varDelta e\left( k \right) -\varDelta e\left( k-1 \right) \right)}/{\varDelta t}} Δu(k)=KpΔe(k)+Kie(k)Δt+Kd(Δe(k)−Δe(k−1))/Δt
其中
Δ u ( k ) = u ( k ) − u ( k − 1 ) Δ e ( k ) = e ( k ) − e ( k − 1 ) \varDelta u\left( k \right) =u\left( k \right) -u\left( k-1 \right) \\ \varDelta e\left( k \right) =e\left( k \right) -e\left( k-1 \right) Δu(k)=u(k)−u(k−1)Δe(k)=e(k)−e(k−1)
2 基于PID的路径跟踪
在基于PID的局部路径规划中,希望机器人能快速跟踪上预设的轨迹,设误差量为 e k e_k ek。 e k e_k ek可以根据实际的控制目标进行选择,例如线速度误差、角速度误差、轨迹跟踪误差等
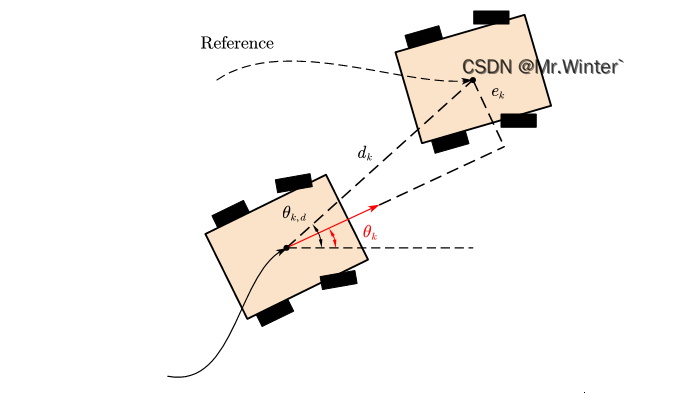
以轨迹跟踪误差为例,如图所示,根据几何关系可得
e k = sin ( θ k , d − θ k ) ⋅ d k e_k=\sin \left( \theta _{k,d}-\theta _k \right) \cdot d_k ek=sin(θk,d−θk)⋅dk
其中
θ k , d = a tan ( y k , d − y k , x k , d − x k ) d k = ( x k , d − x k ) 2 + ( y k , d − y k ) 2 \theta _{k,d}=\mathrm{a}\tan \left( y_{k,d}-y_k,x_{k,d}-x_k \right) \\ d_k=\sqrt{\left( x_{k,d}-x_k \right) ^2+\left( y_{k,d}-y_k \right) ^2} θk,d=atan(yk,d−yk,xk,d−xk)dk=(xk,d−xk)2+(yk,d−yk)2
接着以该误差作为反馈测量值通过PID控制器生成控制量,机器人基于控制量和运动学模型运动,循环往复直到机器人完成控制目标
3 仿真实现
3.1 ROS C++实现
核心的线速度PID控制和角速度PID控制代码如下
double PIDPlanner::LinearPIDController(nav_msgs::Odometry& base_odometry, double b_x_d, double b_y_d)
{
double v = std::hypot(base_odometry.twist.twist.linear.x, base_odometry.twist.twist.linear.y);
double v_d = std::hypot(b_x_d, b_y_d) / d_t_;
if (std::fabs(v_d) > max_v_)
v_d = std::copysign(max_v_, v_d);
double e_v = v_d - v;
i_v_ += e_v * d_t_;
double d_v = (e_v - e_v_) / d_t_;
e_v_ = e_v;
double v_inc = k_v_p_ * e_v + k_v_i_ * i_v_ + k_v_d_ * d_v;
if (std::fabs(v_inc) > max_v_inc_)
v_inc = std::copysign(max_v_inc_, v_inc);
double v_cmd = v + v_inc;
if (std::fabs(v_cmd) > max_v_)
v_cmd = std::copysign(max_v_, v_cmd);
else if (std::fabs(v_cmd) < min_v_)
v_cmd = std::copysign(min_v_, v_cmd);
return v_cmd;
}
double PIDPlanner::AngularPIDController(nav_msgs::Odometry& base_odometry, double e_theta)
{
regularizeAngle(e_theta);
double w_d = e_theta / d_t_;
if (std::fabs(w_d) > max_w_)
w_d = std::copysign(max_w_, w_d);
double w = base_odometry.twist.twist.angular.z;
double e_w = w_d - w;
i_w_ += e_w * d_t_;
double d_w = (e_w - e_w_) / d_t_;
e_w_ = e_w;
double w_inc = k_w_p_ * e_w + k_w_i_ * i_w_ + k_w_d_ * d_w;
if (std::fabs(w_inc) > max_w_inc_)
w_inc = std::copysign(max_w_inc_, w_inc);
double w_cmd = w + w_inc;
if (std::fabs(w_cmd) > max_w_)
w_cmd = std::copysign(max_w_, w_cmd);
else if (std::fabs(w_cmd) < min_w_)
w_cmd = std::copysign(min_w_, w_cmd);
return w_cmd;
}

3.2 Python实现
主体控制流程如下:
def plan(self):
plan_idx = 0
for _ in range(self.max_iter):
# break until goal reached
if math.hypot(self.robot.px - self.goal[0], self.robot.py - self.goal[1]) < self.p_precision:
return True, self.robot.history_pose
# find next tracking point
while plan_idx < len(self.path):
...
# calculate velocity command
if math.hypot(self.robot.px - self.goal[0], self.robot.py - self.goal[1]) < self.p_precision:
if abs(self.robot.theta - self.goal[2]) < self.o_precision:
u = np.array([[0], [0]])
else:
u = np.array([[0], [self.angularController(self.goal[2])]])
elif abs(theta_d - self.robot.theta) > np.pi / 2:
u = np.array([[0], [self.angularController(theta_d)]])
else:
v_d = math.hypot(b_x_d, b_y_d) / self.dt / 10
u = np.array([[self.linearController(v_d)], [self.angularController(theta_d)]])
# feed into robotic kinematic
self.robot.kinematic(u, self.dt)
return False, None

3.3 Matlab实现
核心的线速度PID控制和角速度PID控制代码如下
function [v, e_v_, i_v_] = linearController(robot, b_x_d, b_y_d, dt, e_v_, i_v_)
v_d = norm([b_x_d, b_y_d]) / dt / 10;
e_v = v_d - robot.v;
i_v_ = i_v_ + e_v * dt;
d_v = (e_v - e_v_) / dt;
e_v_ = e_v;
k_v_p = 1.00;
k_v_i = 0.00;
k_v_d = 0.00;
v_inc = k_v_p * e_v_ + k_v_i * i_v_ + k_v_d * d_v;
v = robot.v + v_inc;
end
function [w, e_w_, i_w_] = angularController(robot, theta_d, dt, e_w_, i_w_)
e_theta = theta_d - robot.theta;
if (e_theta > pi)
e_theta = e_theta - 2 * pi;
elseif (e_theta < -pi)
e_theta = e_theta + 2 * pi;
end
w_d = e_theta / dt / 10;
e_w = w_d - robot.w;
i_w_ = i_w_ + e_w * dt;
d_w = (e_w - e_w_) / dt;
e_w_ = e_w;
k_w_p = 1.00;
k_w_i = 0.00;
k_w_d = 0.01;
w_inc = k_w_p * e_w_ + k_w_i * i_w_ + k_w_d * d_w;
w = robot.w + w_inc;
end

完整工程代码请联系下方博主名片获取
🔥 更多精彩专栏:
- 《ROS从入门到精通》
- 《Pytorch深度学习实战》
- 《机器学习强基计划》
- 《运动规划实战精讲》
- …




![[架构之路-245/创业之路-76]:目标系统 - 纵向分层 - 企业信息化的呈现形态:常见企业信息化软件系统 - 企业资源管理计划ERP](https://img-blog.csdnimg.cn/7eed4a732b4b4651ac4eb92a32e50b6e.png)