模拟量控制是一种通过模拟量输入信号来控制伺服电机转矩或速度的方法。通过调整输入信号的大小,可以实现对电机转矩、速度或位置的精确控制。
在伺服运动控制中,大家可能经常听到“位置控制”,“速度控制”,“模拟量控制”等词。前面几个还能理解,但是“模拟量控制”对于很多人来说还是不了解这是个啥,所以今天就给大家简单讲下“模拟量控制”。
模拟量控制是一种通过模拟量输入信号来控制伺服电机运动的方法,一般是控制电机的转矩、速度或位置。
在这种控制方式下,输入信号的变化范围与电机运动的变化范围是成比例的。
通常,输入信号的范围是0-10V或4-20mA,对应着电机运动的最小值和最大值。
在模拟量控制中,输入信号的变化会被转换成电机的运动,从而控制电机的位置、速度或力矩等。
输入信号可以来自于外部的控制器或传感器,例如PLC、PID控制器或者传感器。输入信号的变化会导致伺服电机的运动随之变化,从而实现对电机的精确控制。
通过调整输入信号的大小,可以控制伺服电机的运动。
当输入信号为最小值时,电机运动达到最低值;当输入信号为最大值时,电机运动达到最高值。在输入信号的变化过程中,电机的运动会随之调整,以实现所需的运动参数。
模拟量控制适用于需要精确控制伺服电机转矩、速度或位置的应用场景,例如需要按照特定位置、速度或力度运动的自动化系统、机械加工设备等。通过调整输入信号的大小,可以实现对电机运动参数的灵活调节,满足不同应用需求。
一、模拟量位置控制
模拟量输入位置控制有两种方式:“ 模拟量控制方式 1 ”和“模拟量控制方式 2”。
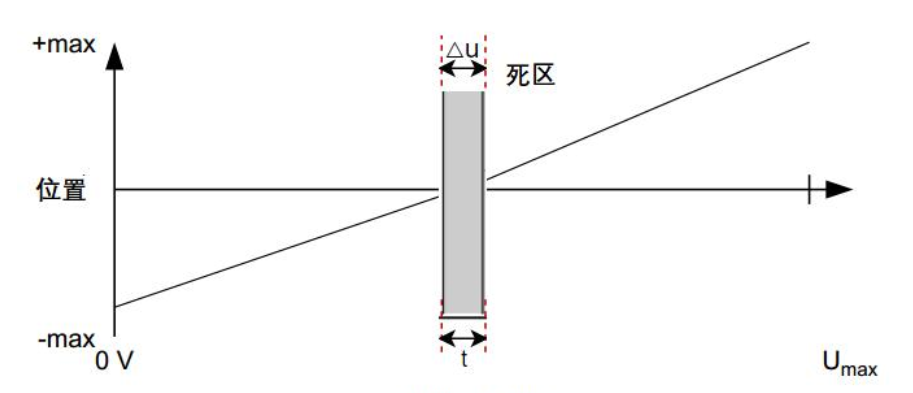
1.模拟量控制方式 1:
死区前的给定位置 = 符号(多功能号 36 电平对应) * 模拟量 10V 对应位置值 * (输入电压*AI1 倍率 + AI1 偏置)/10000
(多功能号 36 有效为负方向, 无效为正方向)
2.模拟量控制方式 2:
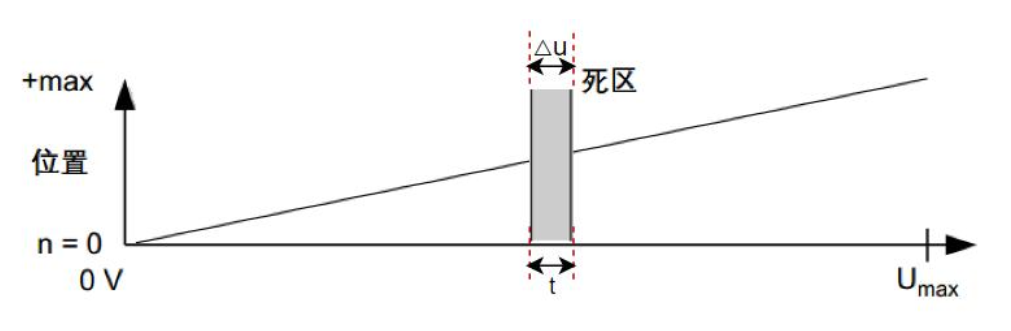
(1)输入电压 5~10V:
死区前的给定位置=模拟量 10V 对应位置值 * (输入电压 * AI1 倍率 +AI1 偏置)/10000
(2)输入电压 0~5V:
死区前的给定位置= -模拟量 10V 对应速度值 * (输入电压 * AI1 倍率 +AI1 偏置)/10000
3.配置示例
(1)参数设置
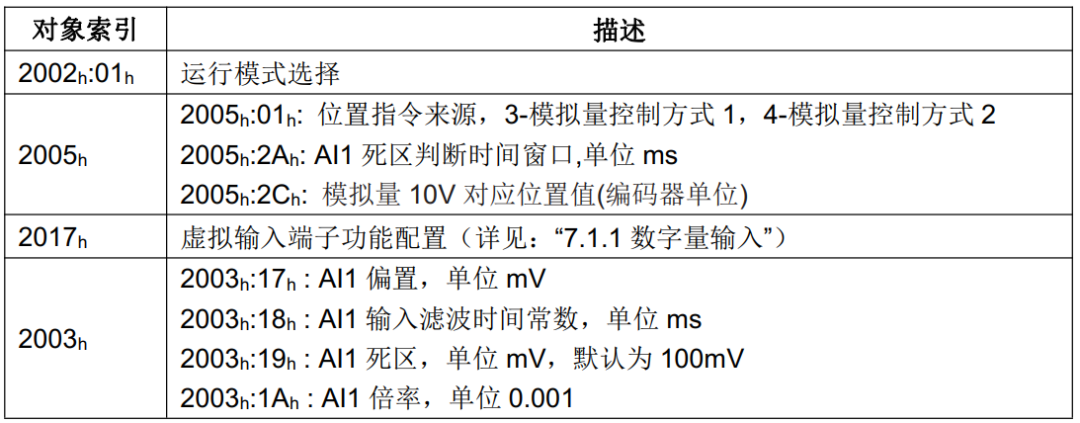
设置为 NiMotion 位置模式:2002h:01h=1
设置位置指令来源为 3:2005h:01h=3
设置电机使能:2003h:03h=1、逻辑为低电平有效:2003h:04h=0
设置模拟量输入位置控制方向:2003h:05h=36、逻辑为下降沿有效:2003h:06h=3
(2)运行
DI1 输入低电平,电机按照模拟量给定的位置运行,DI2 控制电机运转方向
二、模拟量速度控制
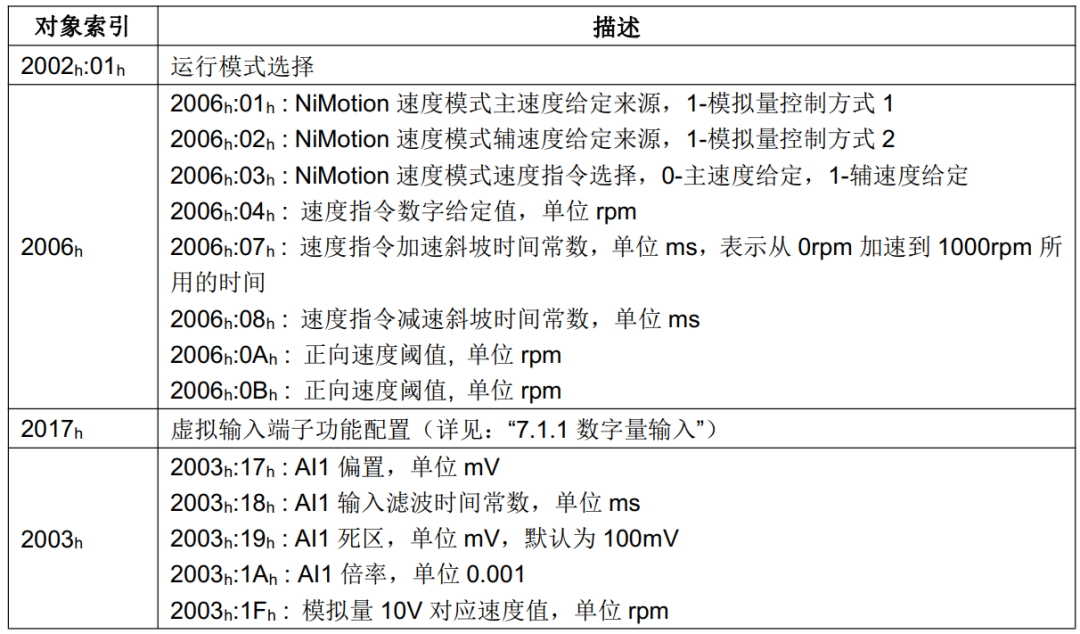
模拟量输入速度控制有两种方式: “模拟量控制方式 1 ”和“模拟量控制方式 2”。
1.模拟量控制方式 1:
死区前的给定速度=符号(多功能号 36 电平对应) * 模拟量 10V 对应速度值 * (输入电压* AI1 倍率 + AI1 偏置)/10000
(多功能号 36 有效为负方向, 无效为正方向。)
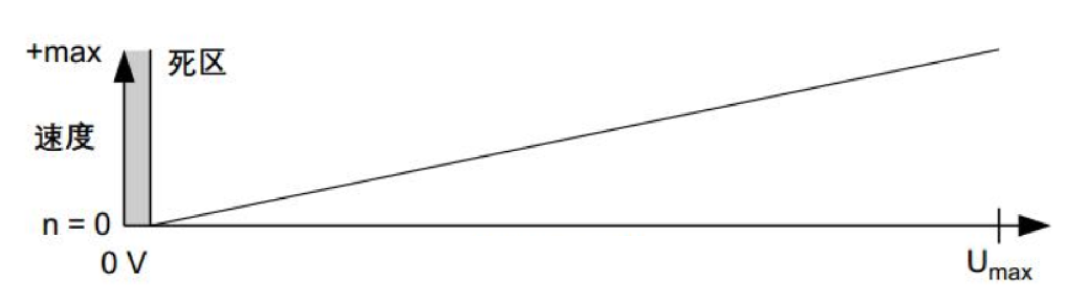
2.模拟量控制方式 2:
(1)输入电压 5~10V:
死区前的给定速度=模拟量 10V 对应速度值 * (输入电压 * AI1 倍率+ AI1 偏置)/10000
(2)输入电压 0~5V:
死区前的给定速度= -模拟量 10V 对应速度值 * (输入电压 * AI1 倍率 + AI1 偏置)/10000
3.配置示例
(1)参数设置
设置为 NiMotion 速度模式:2002h:01h=2;
设置主速度指令来源为 1:2006h:01h=1, 设置速度指令选择 2006h:03h=0;
设置加速斜坡时间常数为 100ms:2006h:07h=100(单位 ms);
设置减速斜坡时间常数为 100ms:2006h:08h=100(单位 ms);
设置模拟量 10V 对应速度值, 2003h:1Fh=3000(单位 rpm);
设置 DI1 和 DI2 端子:
DI1 功能选择为伺服使能:2003h:03h =1;
DI1 逻辑选择低电平有效:2003h:04h =0;
DI2 功能选择为模拟量输入速度控制方向:2003h:05h =36;
DI2 逻辑选择低电平有效:2003h:06h =0;
(2)运行:
DI1 输入低电平, 电机按照模拟量给定(2006h:06h)的速度运行, DI2 控制电机运转方向。
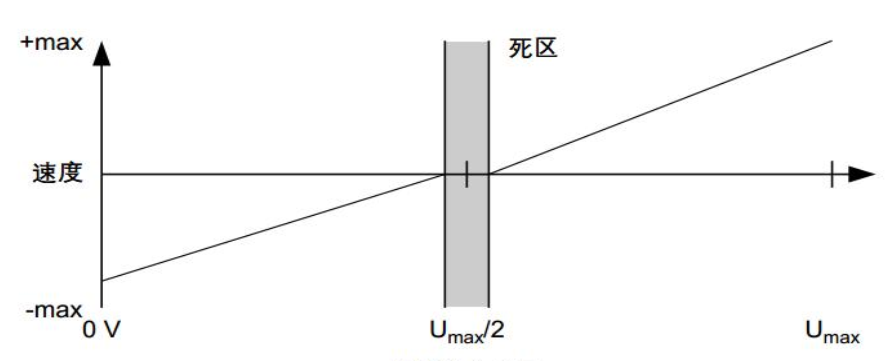
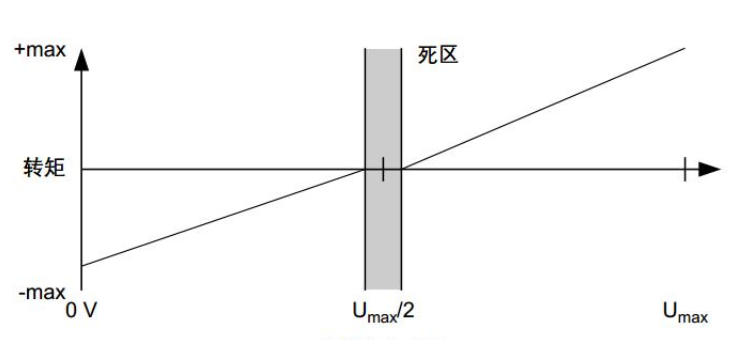
三、模拟量转矩控制

模拟量输入转矩控制有两种方式: “模拟量控制方式 1 ”和“模拟量控制方式 2”。
1.模拟量控制方式 1:
死区前的给定转矩=符号(多功能号 36 电平对应) * 模拟量 10V 对应转矩值 * (输入电压* AI1 倍率 + AI1 偏置)/10000
(多功能号 36 有效为负方向, 无效为正方向。)
2.模拟量控制方式 2:
(1)输入电压 5~10V:
死区前的给定转矩=模拟量 10V 对应转矩值 * (输入电压 * AI1 倍率+ AI1 偏置)/10000
(2)输入电压 0~5V:
死区前的给定转矩= -模拟量 10V 对应转矩值 * (输入电压 * AI1 倍率 + AI1 偏置)/10000
3.配置举例
(1)参数设置
设置为 NiMotion 转矩模式:2002h:01h=3;
设置主转矩指令来源为 1:2007h:01h=1;
设置转矩指令选择为主转矩指令:2007h:03h=0;
设置正反内部转矩限制为 100%:2007h:0Ah=1000 和 2007h:0Bh=1000(单位 0.1%);
设置正反向速度限制值为 3000rpm:2007h:10h=3000 和 2007h:11h=3000(单位 rpm);
设置模拟量 10V 对应转矩值, 2003h:20h=1000(单位 0.1%);
设置 DI1 和 DI2 端子:
DI1 功能选择为伺服使能:2003h:03h =1;
DI1 逻辑选择低电平有效:2003h:04h =0;
DI2 功能选择为模拟量输入转矩控制方向:2003h:05h =36;
DI2 逻辑选择低电平有效:2003h:06h =0;
(2)运行:
DI1 输入低电平, 电机按照模拟量给定(2007h:04h)的转矩运行, DI2 控制电机运转方向
模拟量控制是一种非常常见和有效的控制方式,被广泛应用于各种工业自动化和过程控制系统中。它能够实现高精度、快速响应和灵活性的控制系统,从而实现对各种物理量的精确控制。
准确理解并应用模拟量控制,对于控制电机运行具有重要意义,有助于我们获得最佳的电机运转效果。
以上即是今天分享的全部内容,如果您有其他问题,请及时联系我们。
˜ 本文章全部内容或部分内容禁止擅自转载、拷贝。