【 声明:版权所有,欢迎转载,请勿用于商业用途。 联系信箱:feixiaoxing @163.com】
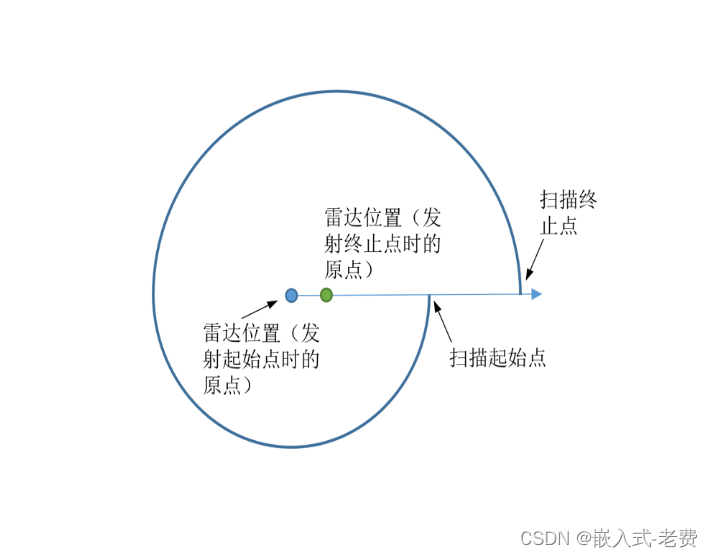
前面我们说过,很多时候传感器的数据并不能直接拿过来使用。这里面除了噪声的原因之外,另外一部分原因就是传感器数据本身也有可能是脏数据,存在运动畸变的可能性。以激光雷达为例,假设一个机器人往前行走,速度是1m/s,lidar旋转的速度是10次/s。一开始的时候,lidar检测前面1m处有一个物体。那么100ms之后,同样的物体,其实这个时候距离只有0.9m了。如果lidar的裸数据没有经过畸变矫正的话,那么不管制图还是定位,本身都是一个错误的结果。
1、处理方法
目前主要的处理办法,就是利用其它传感器数据对lidar数据进行修正。由于其他传感器的频率,本身要比lidar快的多,所以默认短时间内其他传感器的数据是可靠、有效的。通常实践中,一般会用imu对lidar的theta进行修正,而用odom对lidar的x、y进行修正。
2、参考blog
网上有一篇针对运动畸变非常好的文章,非常适合拿来一读,它的地址如下所示,
https://blog.csdn.net/tiancailx/article/details/114924197相关的代码可以参考这个链接,
https://github.com/xiangli0608/Creating-2D-laser-slam-from-scratch3、收集imu和odom数据
在处理lidar数据之前,一般需要对imu和odom的数据进行收集。收集的方法通常就是用queue保存接收到的imu和odom数据。主要目的,则是在处理lidar数据之前找到合适的imu和odom区间,这样才能对lidar数据进行调优处理。
4、lidar数据处理
lidar数据主要分成这几个步骤。首先,需要缓存一帧lidar数据。这帧数据的结束时间,也就是下一帧数据的开始时间。另外,lidar上电的时候,一般也是机器人刚刚工作的时候。此时机器人还没有开始工作,也就没有移动,所以缓存一帧,一般问题不大。
其次,对imu和odom数据分别进行裁剪。裁剪的目的主要是挑出合适的区间数据,然后对这些数据进行掐头去尾的操作,留出合适的数据范围。对每一个范围,计算出对应的角度偏移量和x、y偏移量。
接着就是用imu和odom的数据对lidar数据进行修正。先确认当前数据的时间点,找出对应的imu和odom区间,通过角度偏移、x&y偏移以及插值的方法计算出总的偏移量,最后再用这些总的偏移量对lidar数据一个一个进行矫正。
剩下来的工作就比较简单了,只需要发布数据和重置参数就可以了。发布lidar数据比较好理解,重置参数则是对imu和odom中过时的数据进行清空处理。
5、注意事项
对lidar数据的矫正处理本质上需要有一定的soc算力做支撑。如果机器人本身行走的很慢,不做x和y方向的矫正也可以的。但是机器人旋转的话,对于lidar数据的影响还是蛮大的,最好借助于imu对于lidar的角度数据进行一下矫正。
此外,最好不要用odom的角度数据对lidar数据进行矫正,因为odom的角度也是近似求解出来的,本身精度其实也比较差。