ROS笔记之visualization_msgs-Marker学习

code review!
文章目录
- ROS笔记之visualization_msgs-Marker学习
- 一.line_strip例程
- 二.line_list例程一
- 二.line_list例程二
- 二.TEXT_VIEW_FACING例程
- 三.附CMakeLists.txt和package.xml
- 五.关于odom、base_link和map坐标系
- 六.关于visualization_msgs/Marker 的 frame_locked
- 七.visualization_msgs/Marker 的 lifetime
- 八.visualization_msgs/Marker 的action
- 九.visualization_msgs/Marker消息的一些重要字段
- 十.visualization_msgs/Marker 的 Line Strip 和 Line List
- 十一.visualization_msgs::MarkerArray详解
- 十一.visualization_msgs::MarkerArray例程一
- 十二.visualization_msgs::MarkerArray例程二
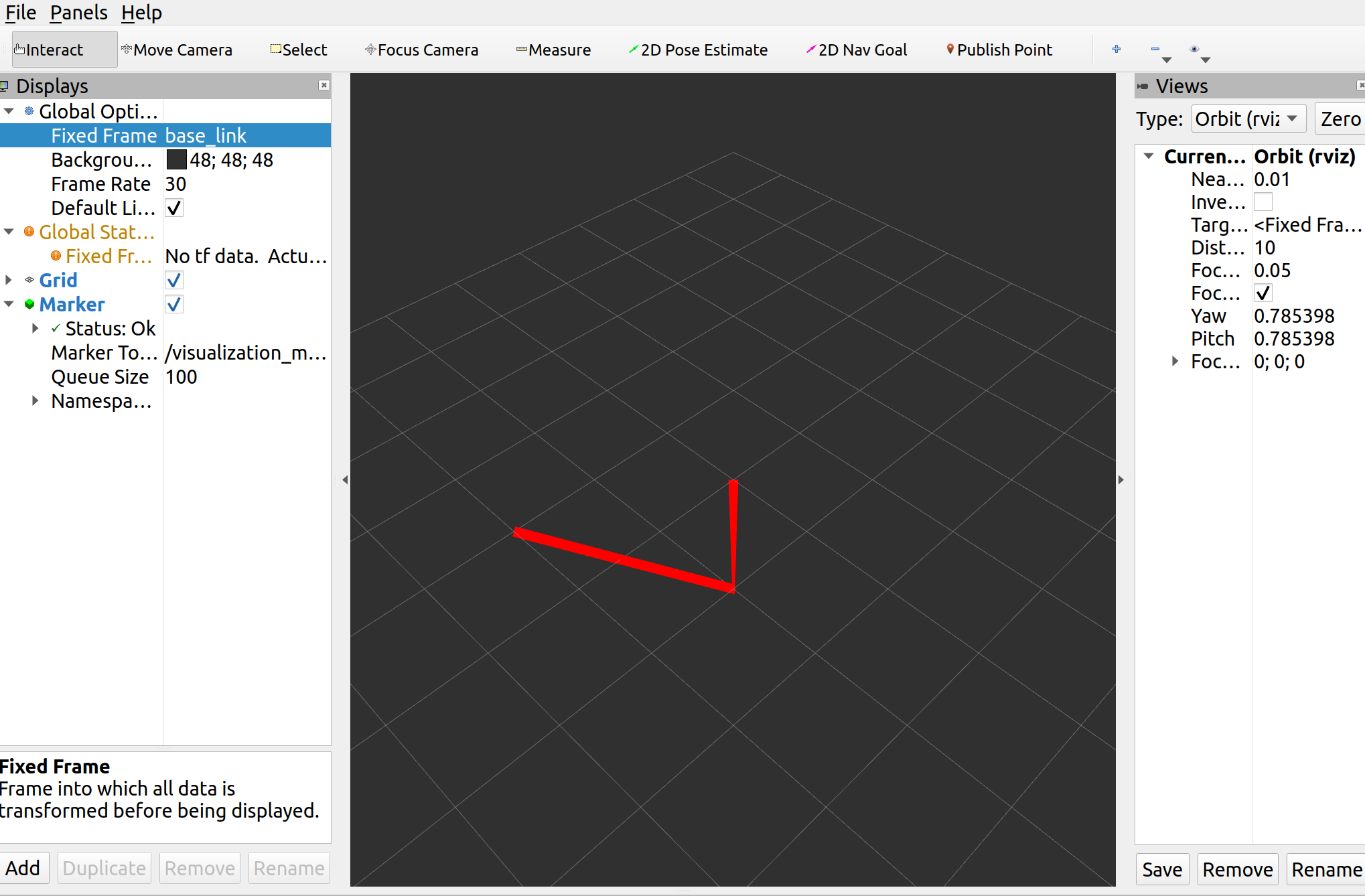
一.line_strip例程
运行
main.cc
#include <geometry_msgs/Point.h>
#include <ros/ros.h>
#include <visualization_msgs/Marker.h>
int main(int argc, char **argv) {
ros::init(argc, argv, "marker_publisher");
ros::NodeHandle nh;
ros::Publisher marker_pub = nh.advertise<visualization_msgs::Marker>("visualization_marker", 10);
// 创建一个Line Strip
visualization_msgs::Marker line_strip;
line_strip.header.frame_id = "base_link";
line_strip.header.stamp = ros::Time::now();
line_strip.ns = "line_strip";
line_strip.action = visualization_msgs::Marker::ADD;
line_strip.type = visualization_msgs::Marker::LINE_STRIP;
line_strip.pose.orientation.w = 1.0;
line_strip.scale.x = 0.1; // 线宽度
line_strip.color.r = 1.0; // 线颜色为红色
line_strip.color.a = 1.0; // 不透明度为1.0
// 添加线段的点
geometry_msgs::Point point1;
point1.x = 0.0;
point1.y = 0.0;
point1.z = 0.0;
line_strip.points.push_back(point1);
geometry_msgs::Point point2;
point2.x = 1.0;
point2.y = 1.0;
point2.z = 0.0;
line_strip.points.push_back(point2);
geometry_msgs::Point point3;
point3.x = 2.0;
point3.y = -1.0;
point3.z = 0.0;
line_strip.points.push_back(point3);
while (ros::ok()) {
// 发布Line List消息
marker_pub.publish(line_strip);
ros::spinOnce();
}
return 0;
}
二.line_list例程一
运行
main.cc
#include <ros/ros.h>
#include <visualization_msgs/Marker.h>
int main(int argc, char** argv)
{
ros::init(argc, argv, "line_list_publisher");
ros::NodeHandle nh;
ros::Publisher marker_pub = nh.advertise<visualization_msgs::Marker>("visualization_marker", 10);
// 创建Line List消息
visualization_msgs::Marker line_list;
line_list.header.frame_id = "map"; // 设置坐标系
line_list.header.stamp = ros::Time::now();
line_list.ns = "line_list";
line_list.action = visualization_msgs::Marker::ADD;
line_list.type = visualization_msgs::Marker::LINE_LIST;
line_list.scale.x = 0.1; // 设置线段宽度
line_list.color.r = 0.0;
line_list.color.g = 1.0;
line_list.color.b = 0.0;
line_list.color.a = 1.0;
// 添加线段1的顶点
geometry_msgs::Point p1, p2;
p1.x = 0.0;
p1.y = 0.0;
p1.z = 0.0;
p2.x = 1.0;
p2.y = 0.0;
p2.z = 0.0;
// 添加线段2的顶点
geometry_msgs::Point p3, p4;
p3.x = 1.0;
p3.y = 1.0;
p3.z = 0.0;
p4.x = 0.0;
p4.y = 1.0;
p4.z = 0.0;
// 添加线段1的两个顶点
line_list.points.push_back(p1);
line_list.points.push_back(p2);
// 添加线段2的两个顶点
line_list.points.push_back(p3);
line_list.points.push_back(p4);
ros::Rate rate(10); // 发布频率为10Hz
while (ros::ok()) {
// 发布Line List消息
marker_pub.publish(line_list);
ros::spinOnce();
rate.sleep();
}
return 0;
}
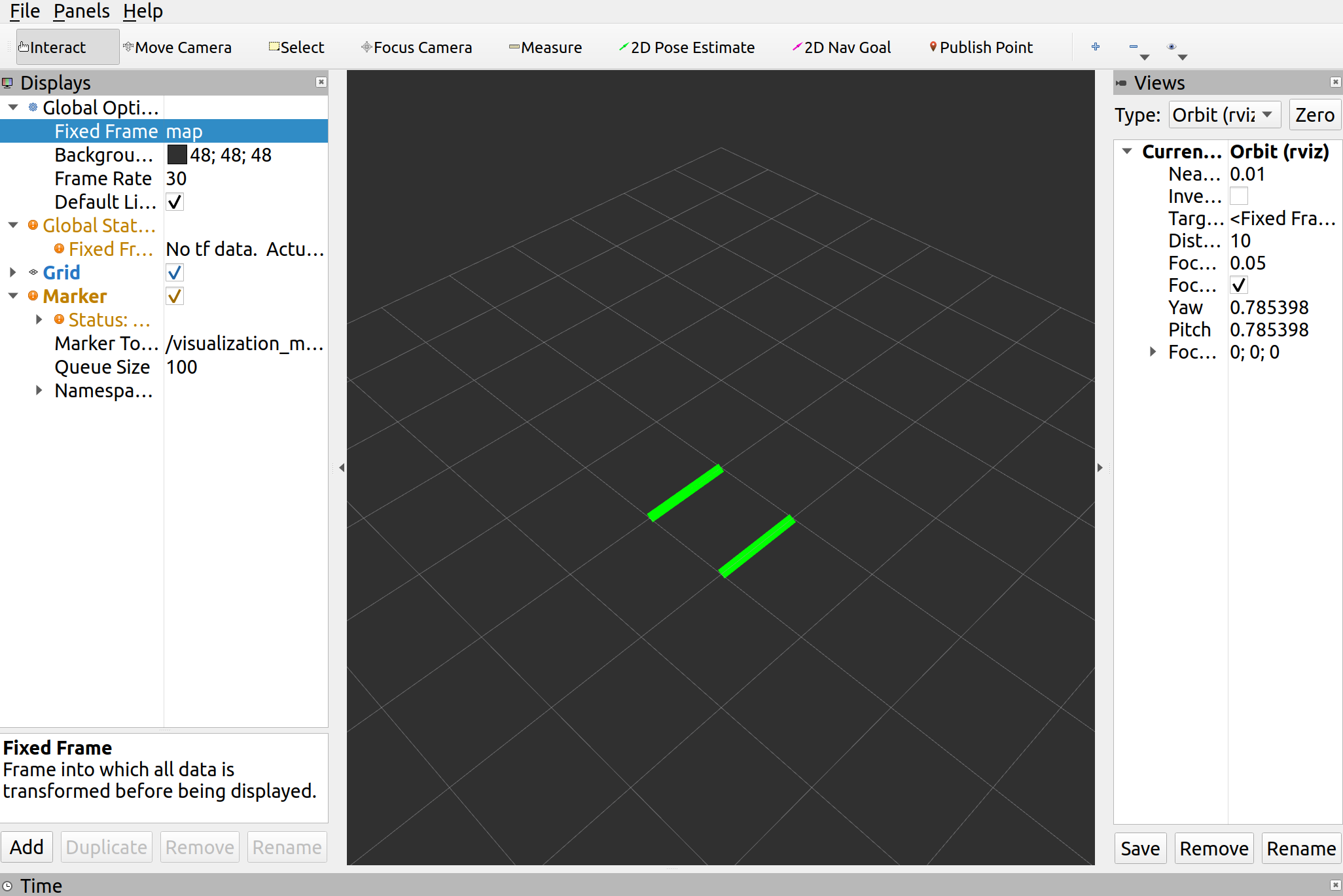
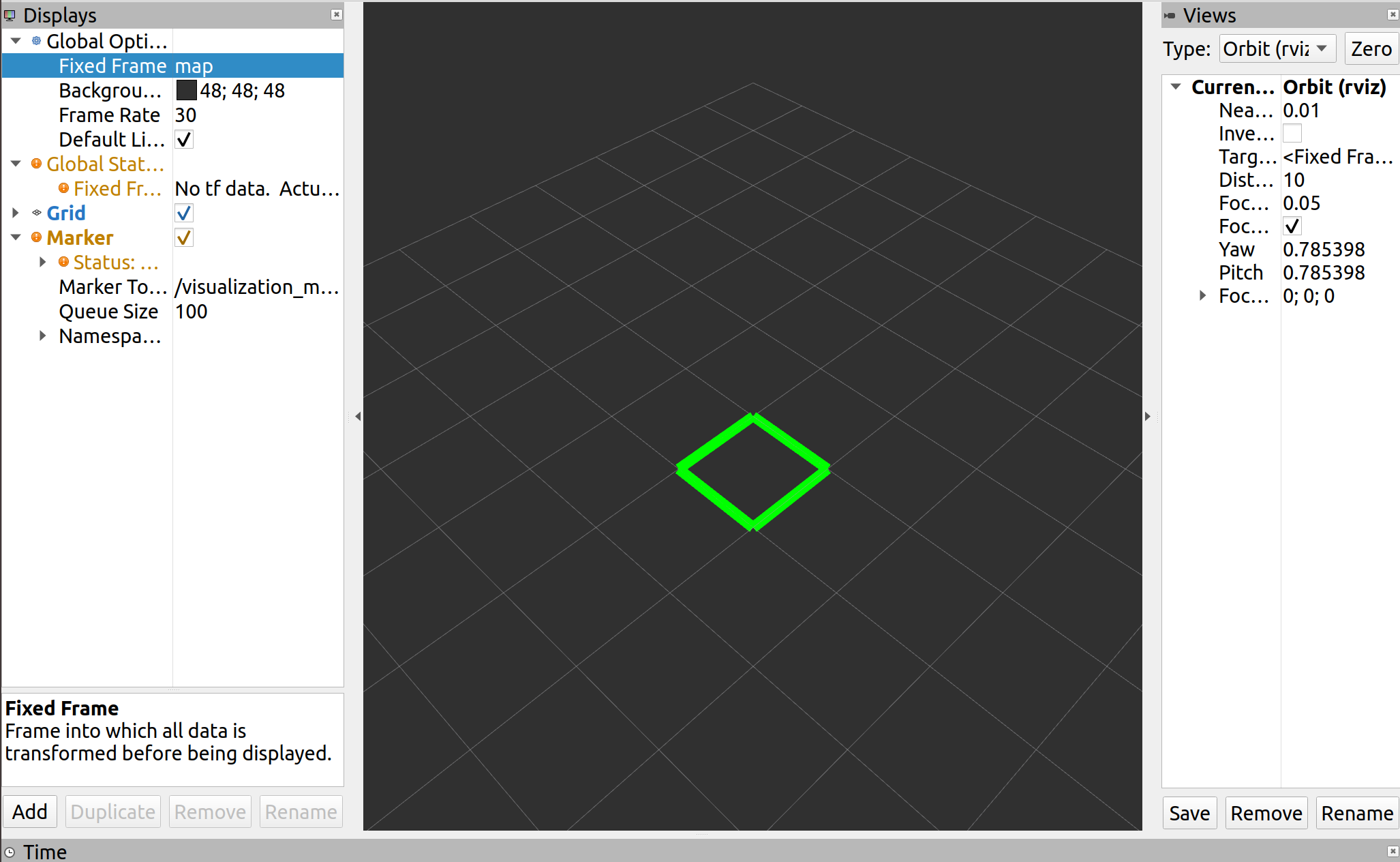
二.line_list例程二
运行
main.cc
#include <ros/ros.h>
#include <visualization_msgs/Marker.h>
int main(int argc, char** argv)
{
ros::init(argc, argv, "line_list_publisher");
ros::NodeHandle nh;
ros::Publisher marker_pub = nh.advertise<visualization_msgs::Marker>("visualization_marker", 10);
// 创建Line List消息
visualization_msgs::Marker line_list;
line_list.header.frame_id = "map"; // 设置坐标系
line_list.header.stamp = ros::Time::now();
line_list.ns = "line_list";
line_list.action = visualization_msgs::Marker::ADD;
line_list.type = visualization_msgs::Marker::LINE_LIST;
line_list.scale.x = 0.1; // 设置线段宽度
line_list.color.r = 0.0;
line_list.color.g = 1.0;
line_list.color.b = 0.0;
line_list.color.a = 1.0;
// 添加线段的顶点
geometry_msgs::Point p1, p2, p3, p4;
p1.x = 0.0;
p1.y = 0.0;
p1.z = 0.0;
p2.x = 1.0;
p2.y = 0.0;
p2.z = 0.0;
p3.x = 1.0;
p3.y = 1.0;
p3.z = 0.0;
p4.x = 0.0;
p4.y = 1.0;
p4.z = 0.0;
// 添加线段的顶点到Line List消息中
line_list.points.push_back(p1);
line_list.points.push_back(p2);
line_list.points.push_back(p2);
line_list.points.push_back(p3);
line_list.points.push_back(p3);
line_list.points.push_back(p4);
line_list.points.push_back(p4);
line_list.points.push_back(p1);
ros::Rate rate(10); // 发布频率为10Hz
while (ros::ok()) {
// 发布Line List消息
marker_pub.publish(line_list);
ros::spinOnce();
rate.sleep();
}
return 0;
}
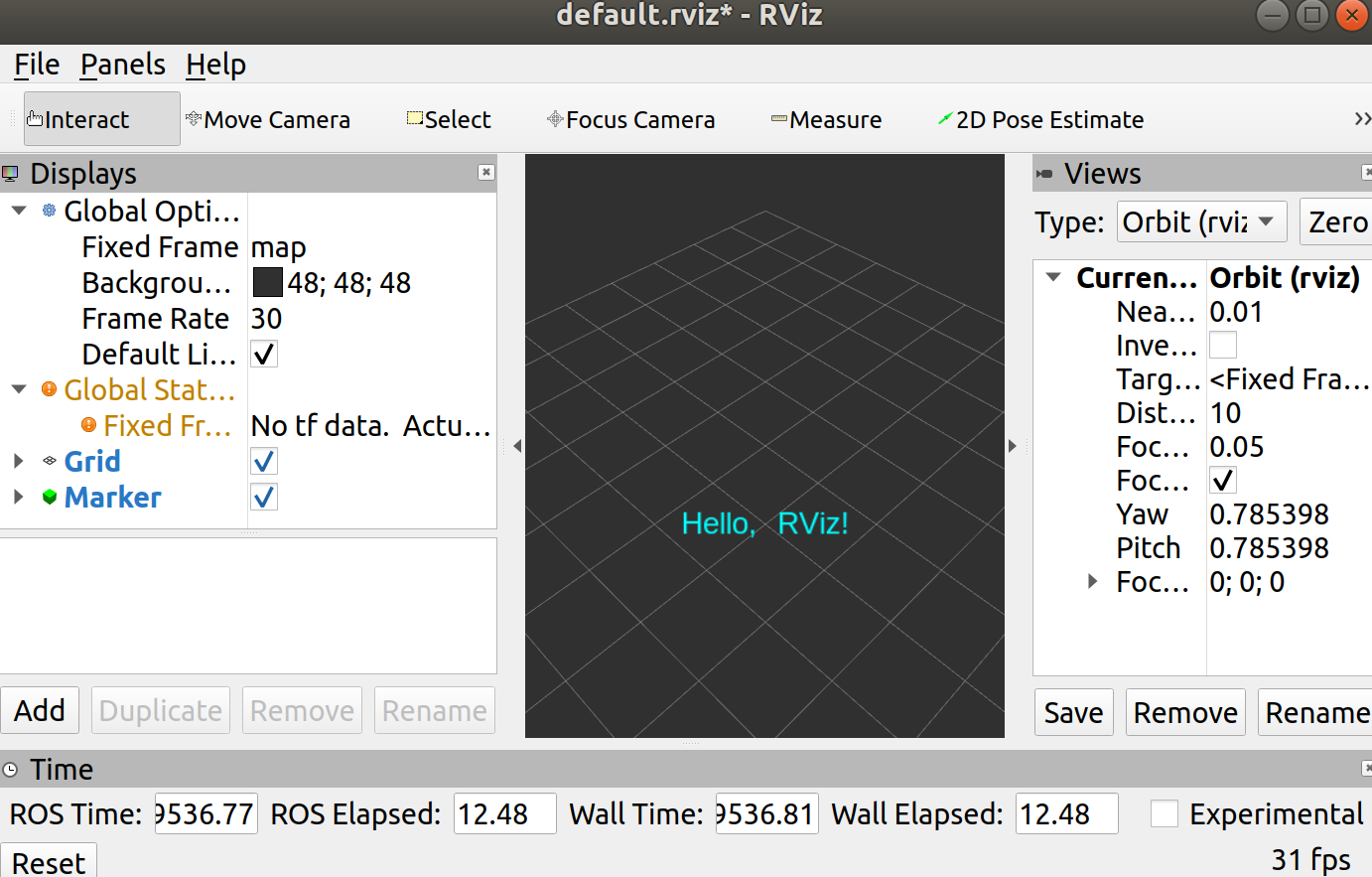
二.TEXT_VIEW_FACING例程
运行
main.cc
#include <ros/ros.h>
#include <visualization_msgs/Marker.h>
int main(int argc, char** argv)
{
ros::init(argc, argv, "text_marker_publisher");
ros::NodeHandle nh;
ros::Publisher marker_pub = nh.advertise<visualization_msgs::Marker>("visualization_marker", 10);
// 创建Marker消息
visualization_msgs::Marker text_marker;
text_marker.header.frame_id = "map"; // 设置坐标系
text_marker.header.stamp = ros::Time::now();
text_marker.ns = "text_marker";
text_marker.action = visualization_msgs::Marker::ADD;
text_marker.type = visualization_msgs::Marker::TEXT_VIEW_FACING;
text_marker.pose.position.x = 1.0; // 设置文字位置
text_marker.pose.position.y = 1.0;
text_marker.pose.position.z = 0.0;
text_marker.pose.orientation.w = 1.0;
text_marker.scale.z = 0.5; // 设置文字大小
text_marker.color.r = 0.0; // 设置颜色为红色
text_marker.color.g = 1.0;
text_marker.color.b = 1.0;
text_marker.color.a = 1.0;
text_marker.text = "Hello, RViz!"; // 设置要显示的文字内容
ros::Rate rate(10); // 发布频率为10Hz
while (ros::ok()) {
// 发布Marker消息
marker_pub.publish(text_marker);
ros::spinOnce();
rate.sleep();
}
return 0;
}
三.附CMakeLists.txt和package.xml
文件结构
附CMakeLists.txt
cmake_minimum_required(VERSION 3.5)
project(ros_templete) # Replace with your package name
find_package(catkin REQUIRED COMPONENTS
roscpp
std_msgs
)
catkin_package(
INCLUDE_DIRS src/inc
CATKIN_DEPENDS roscpp std_msgs
)
include_directories(
${catkin_INCLUDE_DIRS}
src/inc
)
add_executable(visualization_node
src/cc/main.cc
)
target_link_libraries(visualization_node
${catkin_LIBRARIES}
)
install(TARGETS visualization_node
RUNTIME DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
附package.xml
<?xml version="1.0"?>
<package format="2">
<name>ros_templete</name>
<version>0.0.0</version>
<description>>ROS package for handling messages</description>
<maintainer email="user@todo.todo">user</maintainer>
<license>TODO</license>
<build_export_depend>message_generation</build_export_depend>
<exec_depend>message_runtime</exec_depend>
<build_depend>newrizon_msgs</build_depend>
<build_export_depend>newrizon_msgs</build_export_depend>
<exec_depend>newrizon_msgs</exec_depend>
<buildtool_depend>catkin</buildtool_depend>
<build_depend>roscpp</build_depend>
<build_depend>std_msgs</build_depend>
<!-- 添加其他功能包的依赖项,如果需要的话 -->
<exec_depend>roscpp</exec_depend>
<exec_depend>std_msgs</exec_depend>
<!-- 添加其他功能包的依赖项,如果需要的话 -->
</package>
五.关于odom、base_link和map坐标系
在ROS中,odom、base_link和map是常见的坐标系(frame)用于机器人定位和导航。
-
odom(odometry)坐标系:odom坐标系是机器人的里程计坐标系,表示机器人相对于起始位置的运动。odom坐标系通常由里程计传感器(如编码器)提供的运动信息计算得出,并且在运动过程中会累积误差。因此,odom坐标系相对于真实世界可能存在一些漂移或误差。在机器人导航中,通常使用odom坐标系作为局部坐标系。 -
base_link坐标系:base_link坐标系是机器人的本体坐标系(或称为机器人坐标系),它是与机器人自身的物理结构对应的坐标系。base_link坐标系通常位于机器人的底盘或底座的几何中心,用于表示机器人的位置和姿态。它是机器人的本体参考坐标系,与机器人的移动无关。 -
map坐标系:map坐标系是全局地图坐标系,表示机器人所在的全局环境或地图。map坐标系的原点通常是事先设定好的参考点,可以是某个固定的地标或起始位置。map坐标系提供了一个固定的参考框架,用于定位和导航机器人在全局环境中的位置。
在机器人导航中,通常会使用传感器数据(如激光雷达、视觉传感器等)来感知周围环境,并使用算法(如SLAM)来建立地图并定位机器人。通过将base_link坐标系相对于odom坐标系的运动与地图进行对齐,可以得到机器人在全局环境中的位置估计,即机器人在map坐标系中的位姿。
总结:
odom坐标系是机器人的里程计坐标系,相对于起始位置的运动。base_link坐标系是机器人的本体坐标系,与机器人的移动无关。map坐标系是机器人所在的全局地图坐标系,提供了固定的参考框架用于定位和导航机器人在全局环境中的位置。
六.关于visualization_msgs/Marker 的 frame_locked
在RViz中,visualization_msgs/Marker消息的frame_locked字段用于指定Marker是否锁定其坐标系框架。
当frame_locked字段设置为true时,表示Marker的坐标系框架将被锁定,即Marker将始终在其指定的坐标系中显示,无论相机如何移动或旋转。
当frame_locked字段设置为false时,表示Marker的坐标系框架将与相机坐标系相对,即Marker将随着相机的移动和旋转而相应地调整其位置和姿态。
以下是一个示例,展示了如何设置frame_locked字段:
visualization_msgs::Marker marker;
// 设置其他字段
marker.frame_locked = true; // 锁定Marker的坐标系框架
marker_pub.publish(marker);
在上述示例中,我们创建了一个visualization_msgs::Marker对象,并设置了其他字段。然后,我们将frame_locked字段设置为true,以锁定Marker的坐标系框架。最后,我们使用marker_pub.publish(marker)将Marker发布到visualization_marker话题上。
通过设置适当的frame_locked值,可以控制Marker在RViz中是否锁定其坐标系框架。这可以影响Marker的位置和姿态如何与相机的移动和旋转相对应。
请注意,默认情况下,frame_locked字段的值为false,这意味着Marker的坐标系框架将与相机坐标系相对。如果需要固定Marker在其指定的坐标系中显示,可以将frame_locked字段设置为true。
总结起来,通过设置frame_locked字段,您可以控制Marker是否锁定其坐标系框架,以便在RViz中根据需要调整Marker的位置和姿态。
七.visualization_msgs/Marker 的 lifetime
在RViz中,visualization_msgs/Marker消息的lifetime字段用于指定Marker的显示时间。lifetime字段是一个rospy.Duration类型的值,表示Marker在RViz中显示的持续时间。
当发布一个Marker消息时,RViz将根据lifetime字段的值来确定Marker的显示时间。一旦超过指定的持续时间,RViz将自动将Marker从显示中移除。
以下是一个示例,展示了如何设置lifetime字段:
visualization_msgs::Marker marker;
// 设置其他字段
marker.lifetime = ros::Duration(5.0); // 设置显示时间为5秒
marker_pub.publish(marker);
在上述示例中,我们创建了一个visualization_msgs::Marker对象,并设置了其他字段。然后,我们使用ros::Duration类创建一个持续时间为5秒的ros::Duration对象,并将其赋值给lifetime字段。最后,我们使用marker_pub.publish(marker)将Marker发布到visualization_marker话题上。
通过设置适当的lifetime值,可以控制Marker在RViz中显示的持续时间。一旦超过指定的时间,RViz将自动将Marker从显示中移除。
请注意,如果将lifetime字段设置为0,表示Marker应该一直保持显示,直到通过发布DELETE操作或DELETEALL操作来明确删除它。这对于需要手动控制Marker的显示和隐藏非常有用。
总结起来,lifetime字段允许您控制在RViz中显示Marker的持续时间,使您能够根据需要定制Marker的显示时间。
八.visualization_msgs/Marker 的action
在ROS中,visualization_msgs/Marker消息的action字段用于指定在RViz中如何处理Marker。action字段的值可以是以下几种之一:
visualization_msgs::Marker::ADD:将Marker添加到可视化工具中。如果指定的id在可视化工具中已经存在,将替换现有的Marker。visualization_msgs::Marker::DELETE:删除指定id的Marker。如果指定的id在可视化工具中不存在,操作被忽略。visualization_msgs::Marker::DELETEALL:删除所有属于该命名空间(ns字段)的Marker。
通过使用不同的action值,可以在RViz中动态地添加、更新或删除Marker。
以下是一些示例,展示了如何使用不同的action值操作Marker:
- 添加一个新的Marker:
visualization_msgs::Marker marker;
// 设置其他字段
marker.action = visualization_msgs::Marker::ADD;
marker_pub.publish(marker);
- 更新现有的Marker:
visualization_msgs::Marker marker;
// 设置其他字段
marker.action = visualization_msgs::Marker::ADD; // 使用ADD操作确保更新现有Marker
marker_pub.publish(marker);
- 删除特定
id的Marker:
visualization_msgs::Marker marker;
marker.id = 1; // 要删除的Marker的id
// 其他字段可以为空,因为删除操作不需要其他信息
marker.action = visualization_msgs::Marker::DELETE;
marker_pub.publish(marker);
- 删除所有属于特定命名空间的Marker:
visualization_msgs::Marker marker;
marker.ns = "my_namespace"; // 要删除的Marker所属的命名空间
// 其他字段可以为空,因为删除操作不需要其他信息
marker.action = visualization_msgs::Marker::DELETEALL;
marker_pub.publish(marker);
在上述示例中,我们创建了一个visualization_msgs/Marker对象,并设置了其他字段,然后将action字段设置为适当的值。最后,我们使用marker_pub.publish(marker)将Marker发布到visualization_marker话题上,以便在RViz中执行所需的操作。
请注意,当使用DELETE或DELETEALL操作删除Marker时,只需设置id或ns字段即可。其他字段可以为空,因为删除操作不需要这些信息。
通过使用适当的action值,您可以根据需要在RViz中添加、更新或删除Marker,从而实现对可视化对象的动态控制。
九.visualization_msgs/Marker消息的一些重要字段
下面是visualization_msgs/Marker消息的一些重要字段:
- header:消息的头部信息,包括frame_id和timestamp等。
- ns:命名空间,用于将Marker分组。
- id:Marker的唯一标识符,用于标识不同的Marker。
- type:Marker的类型,指定要显示的形状。可以使用visualization_ms- gs/Marker消息定义的常量来设置,如visualization_msgs::Marker::S- PHERE表示球体。
- action:Marker的操作类型,指定在RViz中如何处理该Marker。常见的- 操作类型包括ADD、DELETE和DELETEALL。
- pose:Marker的位姿,指定Marker在三维空间中的位置和方向。
- scale:Marker的尺寸,用于控制Marker的大小或线宽等属性。
- color:Marker的颜色,可以设置RGBA值来指定颜色和不透明度。
- points:用于线条和多边形等形状的点列表。每个点由geometry_msgs/- Point消息表示。
- text:用于文本形状的字符串内容。
- lifetime:Marker的生命周期,用于控制Marker在RViz中的显示时间。
十.visualization_msgs/Marker 的 Line Strip 和 Line List
在RViz中,visualization_msgs/Marker消息类型可用于可视化各种图形对象,包括线条(Line Strip)和线段列表(Line List)。这些对象用于在3D环境中呈现线条或连接多个线段。
-
Line Strip(线条):Line Strip由一系列连接的线段组成,线段之间按照顺序连接。在RViz中,它们通常用于表示路径、轨迹或连续的线条。每个线段都由两个点定义,相邻线段之间共享一个点。
-
Line List(线段列表):Line List由多个独立的线段组成,每个线段由两个点定义。在RViz中,它们通常用于表示离散的线段集合,每个线段之间都是独立的。可以使用Line List来可视化多个不相连的线段。
十一.visualization_msgs::MarkerArray详解
visualization_msgs::MarkerArray是ROS中的消息类型,用于在RViz中发布多个Marker的数组。
visualization_msgs::MarkerArray消息由以下字段组成:
markers(std::vector<visualization_msgs::Marker>):包含多个visualization_msgs::Marker对象的数组。每个Marker对象都描述了一个可视化元素,如点、线、箭头、文本等。
通过使用visualization_msgs::MarkerArray消息,您可以同时发布多个Marker,并在RViz中以数组的形式显示它们。
以下是一个示例,展示了如何创建和使用visualization_msgs::MarkerArray消息:
#include <ros/ros.h>
#include <visualization_msgs/MarkerArray.h>
int main(int argc, char** argv)
{
ros::init(argc, argv, "marker_array_publisher");
ros::NodeHandle nh;
ros::Publisher marker_array_pub = nh.advertise<visualization_msgs::MarkerArray>("marker_array_topic", 10);
visualization_msgs::MarkerArray marker_array;
// 创建第一个Marker
visualization_msgs::Marker marker1;
// 设置marker1的各种字段
marker_array.markers.push_back(marker1);
// 创建第二个Marker
visualization_msgs::Marker marker2;
// 设置marker2的各种字段
marker_array.markers.push_back(marker2);
// 发布MarkerArray
marker_array_pub.publish(marker_array);
ros::spin();
return 0;
}
在上述示例中,我们包含了所需的头文件和ROS节点的初始化。然后,我们创建了一个ros::Publisher对象来发布visualization_msgs::MarkerArray消息。接下来,我们创建了一个visualization_msgs::MarkerArray对象,并向其中添加两个visualization_msgs::Marker对象。每个Marker对象可以设置其字段,例如type、pose、scale等。最后,我们使用marker_array_pub.publish(marker_array)将MarkerArray消息发布到marker_array_topic话题上。
通过发布visualization_msgs::MarkerArray消息,RViz将会显示数组中的每个Marker,并根据各自的参数进行渲染和显示。
总结起来,visualization_msgs::MarkerArray消息允许您在RViz中同时发布和显示多个Marker。您可以通过填充markers字段来创建Marker数组,并通过发布MarkerArray消息将其发送到适当的话题上。
十一.visualization_msgs::MarkerArray例程一
运行
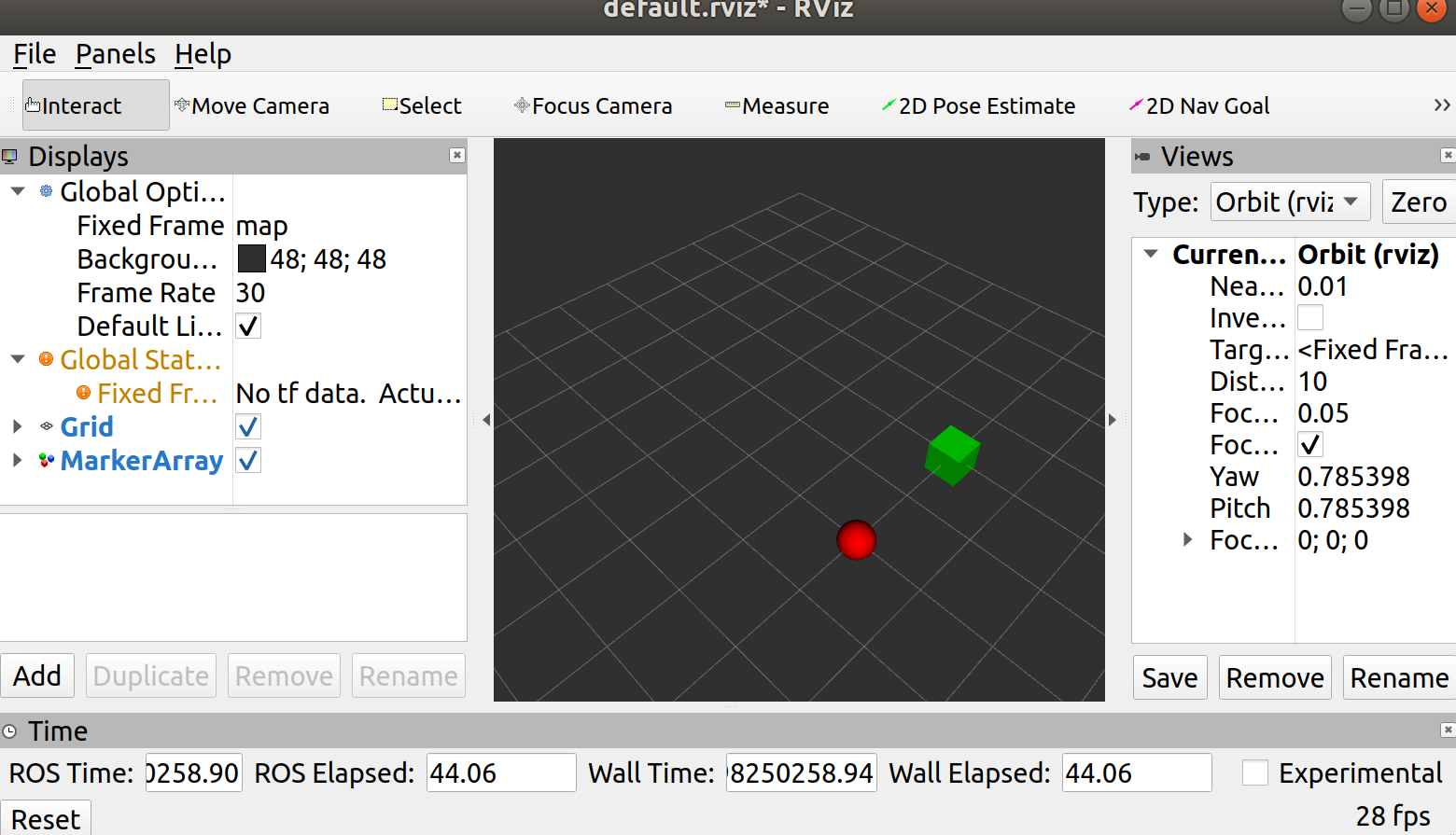
main.cc
#include <ros/ros.h>
#include <visualization_msgs/MarkerArray.h>
int main(int argc, char** argv)
{
ros::init(argc, argv, "marker_array_publisher");
ros::NodeHandle nh;
ros::Publisher marker_array_pub = nh.advertise<visualization_msgs::MarkerArray>("marker_array", 10);
// 创建MarkerArray消息
visualization_msgs::MarkerArray marker_array;
// 创建第一个Marker
visualization_msgs::Marker marker1;
marker1.header.frame_id = "map";
marker1.header.stamp = ros::Time::now();
marker1.ns = "marker_array";
marker1.id = 1;
marker1.type = visualization_msgs::Marker::SPHERE;
marker1.pose.position.x = 1.0;
marker1.pose.position.y = 2.0;
marker1.pose.position.z = 0.0;
marker1.pose.orientation.w = 1.0;
marker1.scale.x = 0.5;
marker1.scale.y = 0.5;
marker1.scale.z = 0.5;
marker1.color.r = 1.0;
marker1.color.g = 0.0;
marker1.color.b = 0.0;
marker1.color.a = 1.0;
marker_array.markers.push_back(marker1);
// 创建第二个Marker
visualization_msgs::Marker marker2;
marker2.header.frame_id = "map";
marker2.header.stamp = ros::Time::now();
marker2.ns = "marker_array";
marker2.id = 2;
marker2.type = visualization_msgs::Marker::CUBE;
marker2.pose.position.x = -1.0;
marker2.pose.position.y = 2.0;
marker2.pose.position.z = 0.0;
marker2.pose.orientation.w = 1.0;
marker2.scale.x = 0.5;
marker2.scale.y = 0.5;
marker2.scale.z = 0.5;
marker2.color.r = 0.0;
marker2.color.g = 1.0;
marker2.color.b = 0.0;
marker2.color.a = 1.0;
marker_array.markers.push_back(marker2);
ros::Rate rate(1); // 发布频率为1Hz
while (ros::ok()) {
// 发布MarkerArray消息
marker_array_pub.publish(marker_array);
ros::spinOnce();
rate.sleep();
}
return 0;
}
十二.visualization_msgs::MarkerArray例程二
运行
main.cc
#include <ros/ros.h>
#include <visualization_msgs/MarkerArray.h>
#include <visualization_msgs/Marker.h>
int main(int argc, char** argv)
{
ros::init(argc, argv, "marker_publisher");
ros::NodeHandle nh;
ros::Publisher marker_array_pub = nh.advertise<visualization_msgs::MarkerArray>("marker_array", 10);
ros::Publisher marker_pub = nh.advertise<visualization_msgs::Marker>("marker", 10);
// 创建MarkerArray消息
visualization_msgs::MarkerArray marker_array;
// 创建第一个Marker
visualization_msgs::Marker marker1;
marker1.header.frame_id = "map";
marker1.header.stamp = ros::Time::now();
marker1.lifetime = ros::Duration(); // 设置持久化属性为false
marker1.ns = "marker1";
marker1.id = 1;
marker1.type = visualization_msgs::Marker::SPHERE;
marker1.pose.position.x = 1.0;
marker1.pose.position.y = 2.0;
marker1.pose.position.z = 0.0;
marker1.pose.orientation.w = 1.0;
marker1.scale.x = 0.5;
marker1.scale.y = 0.5;
marker1.scale.z = 0.5;
marker1.color.r = 1.0;
marker1.color.g = 0.0;
marker1.color.b = 0.0;
marker1.color.a = 1.0;
// 创建第二个Marker
visualization_msgs::Marker marker2;
marker2.header.frame_id = "map";
marker2.header.stamp = ros::Time::now();
marker2.lifetime = ros::Duration(); // 设置持久化属性为false
marker2.ns = "marker2";
marker2.id = 2;
marker2.type = visualization_msgs::Marker::CUBE;
marker2.pose.position.x = -1.0;
marker2.pose.position.y = 2.0;
marker2.pose.position.z = 0.0;
marker2.pose.orientation.w = 1.0;
marker2.scale.x = 0.5;
marker2.scale.y = 0.5;
marker2.scale.z = 0.5;
marker2.color.r = 0.0;
marker2.color.g = 1.0;
marker2.color.b = 0.0;
marker2.color.a = 1.0;
marker_array.markers.clear();
marker_array.markers.push_back(marker1);
marker_array.markers.push_back(marker2);
ros::Rate rate(1); // 发布频率为1Hz
while (ros::ok()) {
// 发布MarkerArray消息
marker_array_pub.publish(marker_array);
// 发布单个Marker消息
marker_pub.publish(marker1);
ros::spinOnce();
rate.sleep();
}
return 0;
}