对于这款板子,官方并没有提供串口例程,只能自行添加。
一、PA9/PA10复用成串口1功能不可用
驱动测试代码如下:
main.c:
#include "main.h"
#include <stdio.h>
void usart1_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
//(1)串口时钟和 GPIO 时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);//GPIO口时钟使能, 引脚PA9,PA10可以复用为串口功能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//串口UART1时钟使能, 串口1是挂载在 APB2总线下的外设
//(2)配置GPIO引脚为复用功能[PA9+PA10]
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_USART1);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9|GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//电平翻转速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化 PA9,PA10
//(3)配置串口1参数
USART_InitStructure.USART_BaudRate = 115200;//波特率
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//不使用硬件流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//收发模式
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//8个数据位
USART_Init(USART1, &USART_InitStructure); //初始化串口1
//(4) 开启中断并且初始化 NVIC,使能相应中断[接收一个byte触发中断一次]
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 3;//抢占优先级 3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;//响应优先级 3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化NVIC寄存器
//(5) 使能串口1
USART_Cmd(USART1, ENABLE);
}
//串口1中断服务函数
void USART1_IRQHandler(void)
{
char res;
//检查标志位
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
res = USART_ReceiveData(USART1);//收到数据后读出来
USART_SendData(USART1,res);//读到数据后立刻发送出去
//清空标志位
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
int main(void)
{
usart1_init();
while(1)
{
;
}
return 0;
}固件烧录后,连接PC端串口工具,串口收发功能不可用。原因:PA9/PA10设计给板载USB使用,打开原理如下:

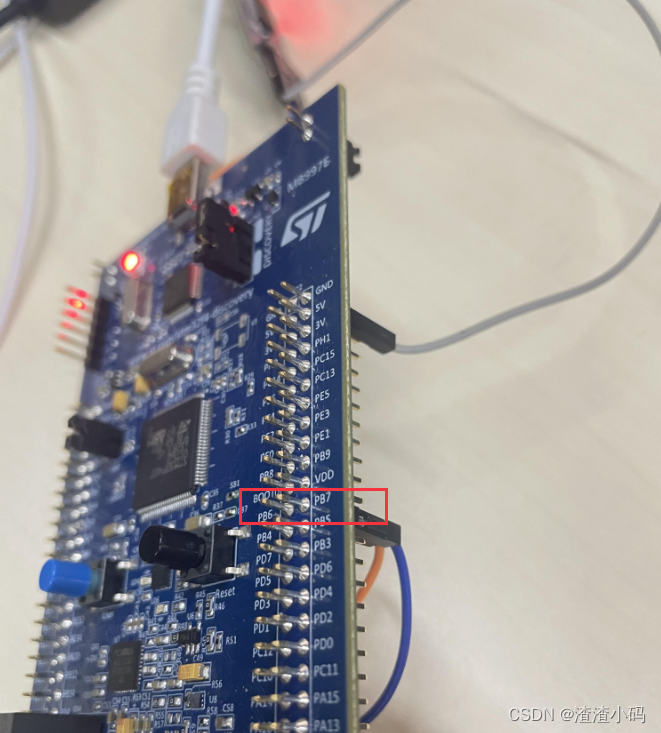
所以,只能换一组GPIO,换成PB6/PB7(原理图上可确认没有其他外设使用),测试代码如下:
#if 0
void usart1_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
//(1)串口时钟和 GPIO 时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE);//GPIO口时钟使能, 引脚PA9,PA10可以复用为串口功能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//串口UART1时钟使能, 串口1是挂载在 APB2总线下的外设
//(2)配置GPIO引脚为复用功能[PA9+PA10]
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_USART1);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9|GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//电平翻转速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化 PA9,PA10
//(3)配置串口1参数
USART_InitStructure.USART_BaudRate = 115200;//波特率
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//不使用硬件流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//收发模式
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//8个数据位
USART_Init(USART1, &USART_InitStructure); //初始化串口1
//(4) 开启中断并且初始化 NVIC,使能相应中断[接收一个byte触发中断一次]
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 3;//抢占优先级 3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;//响应优先级 3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化NVIC寄存器
//(5) 使能串口1
USART_Cmd(USART1, ENABLE);
}
//串口1中断服务函数
void USART1_IRQHandler(void)
{
char res;
//检查标志位
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
res = USART_ReceiveData(USART1);//收到数据后读出来
USART_SendData(USART1,res);//读到数据后立刻发送出去
//清空标志位
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
#else
void usart1_init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
//(1)串口时钟和 GPIO 时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB,ENABLE); //使能GPIOB时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//串口UART1时钟使能, 串口1是挂载在 APB2总线下的外设
//(2)配置GPIO引脚为复用功能[PB6+PB7]
GPIO_PinAFConfig(GPIOB, GPIO_PinSource6, GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource7, GPIO_AF_USART1);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//电平翻转速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化 PA9,PA10
//(3)配置串口1参数
USART_InitStructure.USART_BaudRate = 115200;//波特率
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//不使用硬件流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//收发模式
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//8个数据位
USART_Init(USART1, &USART_InitStructure); //初始化串口1
//(4) 开启中断并且初始化 NVIC,使能相应中断[接收一个byte触发中断一次]
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 3;//抢占优先级 3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;//响应优先级 3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化NVIC寄存器
//(5) 使能串口1
USART_Cmd(USART1, ENABLE);
}
//串口1中断服务函数
void USART1_IRQHandler(void)
{
char res;
STM_EVAL_LEDOn(LED4);
//检查标志位
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
res = USART_ReceiveData(USART1);//收到数据后读出来
STM_EVAL_LEDOn(LED5);
USART_SendData(USART1,res);//读到数据后立刻发送出去
//清空标志位
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
#endif
int main(void)
{
usart1_init();
while(1)
{
;
}
return 0;
}板子实物图连接如下:

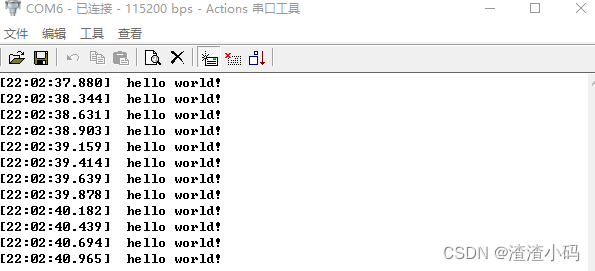
串口工具测试如下:

二、串口标准输入输出重定向打印实现
直接重写标准输入输出函数的底层接口即可,如下:
| //重写printf底层函数接口 int fputc(int c, FILE *stream) { USART1->DR=c; //发送一个字符 while(!(USART1->SR&1<<7)){} return c; } //重写scanf底层函数接口 int fgetc(FILE *stream) { while(!(USART1->SR&1<<5)){} return USART1->DR; } |
烧录固件,并按reset键,观察串口调试助手上的打印:使用ST-LINK的方式进行烧录

串口助手:
三、完整代码
usart.c
/* Includes ------------------------------------------------------------------*/
#include "stm32f4xx.h"
#include <stdio.h>
void usart1_init(uint32_t BaudRate)
{
GPIO_InitTypeDef GPIO_InitStructure;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
//(1)串口时钟和 GPIO 时钟使能
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB,ENABLE); //使能GPIOB时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//串口UART1时钟使能, 串口1是挂载在 APB2总线下的外设
//(2)配置GPIO引脚为复用功能[PB6+PB7]
GPIO_PinAFConfig(GPIOB, GPIO_PinSource6, GPIO_AF_USART1);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource7, GPIO_AF_USART1);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//电平翻转速度100MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOB, &GPIO_InitStructure); //初始化 PA9,PA10
//(3)配置串口1参数
USART_InitStructure.USART_BaudRate = BaudRate;//波特率
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;//不使用硬件流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;//收发模式
USART_InitStructure.USART_Parity = USART_Parity_No;//无奇偶校验位
USART_InitStructure.USART_StopBits = USART_StopBits_1;//一个停止位
USART_InitStructure.USART_WordLength = USART_WordLength_8b;//8个数据位
USART_Init(USART1, &USART_InitStructure); //初始化串口1
//(4) 开启中断并且初始化 NVIC,使能相应中断[接收一个byte触发中断一次]
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 3;//抢占优先级 3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3;//响应优先级 3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化NVIC寄存器
//(5) 使能串口1
USART_Cmd(USART1, ENABLE);
}
//串口1中断服务函数
void USART1_IRQHandler(void)
{
char res;
//检查标志位
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
res = USART_ReceiveData(USART1);//收到数据后读出来
USART_SendData(USART1,res);//读到数据后立刻发送出去
//清空标志位
USART_ClearITPendingBit(USART1, USART_IT_RXNE);
}
}
//重写printf底层函数接口
int fputc(int c, FILE *stream)
{
USART1->DR=c; //发送一个字符
while(!(USART1->SR&1<<7)){}
return c;
}
//重写scanf底层函数接口
int fgetc(FILE *stream)
{
while(!(USART1->SR&1<<5)){}
return USART1->DR;
}
/******************* (C) COPYRIGHT 2011 STMicroelectronics *****END OF FILE****/
usart.h
#ifndef __USART__H__
#define __USART__H__
void usart1_init(uint32_t BaudRate);
#endif /* __USART__H__ */main.c
#include "usart.h"
#include <stdio.h>
int main(void)
{
usart1_init(115200);
printf("hello world!\n");
while(1)
{
;
}
return 0;
}注:这款Discovery开发板是基于标准外设库函数来开发的,因此工程中要把串口相关的库函数文件添加进来,如下: