目录
一、opencalib安装
二、lidar2camera的安装
三、测试运行
四、出现过的问题
一、opencalib安装
代码地址:https://github.com/PJLab-ADG/SensorsCalibration/blob/master/README.md
# pull docker image
sudo docker pull scllovewkf/opencalib:v1
# After the image is pulled down, start the docker image. /home/sz3/ailab/ = code root path on your host
docker run -it -v /home/sz3/ailab/:/share scllovewkf/opencalib:v1 /bin/bash
# or
sudo ./run_docker.sh
二、lidar2camera的安装
我没有把openclib整个安装下来,只装了我需要的lidar2camera,以下是安装过程
开源代码地址:https://github.com/PJLab-ADG/SensorsCalibration/tree/master/lidar2camera
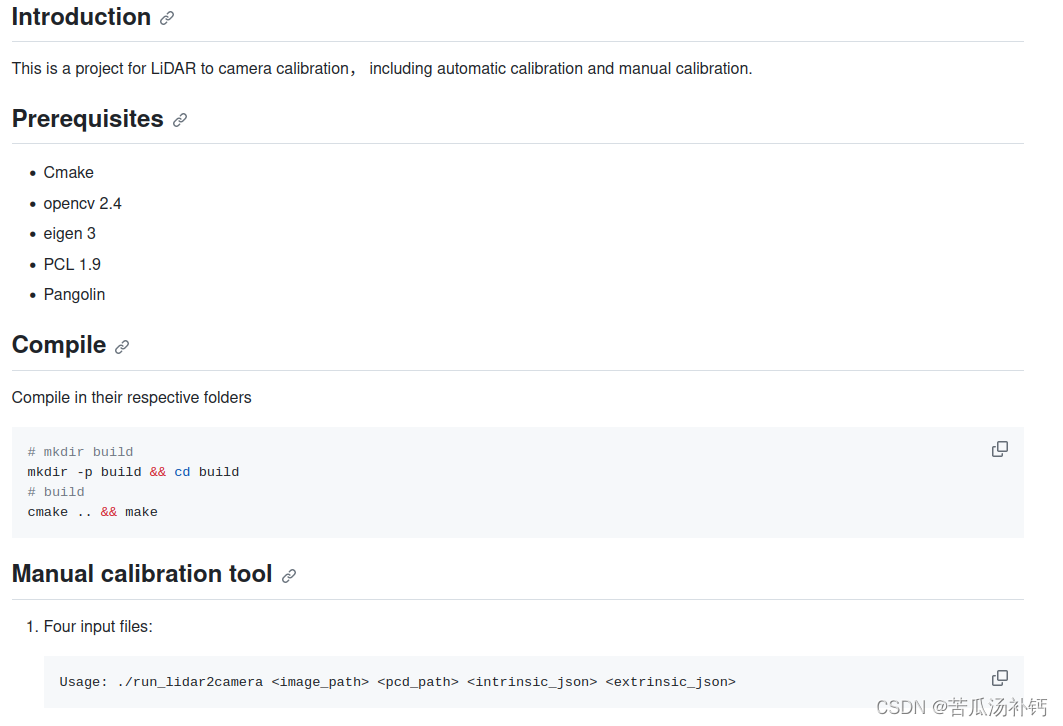
1.cmake的安装
安装的是最新版本。
wget -O - https://apt.kitware.com/keys/kitware-archive-latest.asc 2>/dev/null | sudo apt-key add -
sudo apt-add-repository 'deb https://apt.kitware.com/ubuntu/ bionic main'
sudo apt-get update
sudo apt install cmake
通过which cmake可以查看安装的路径。


2.opencv的安装
pip install opencv-python
3.eigen 3的安装
sudo apt-get install libeigen3-dev
4.PCL的安装
sudo apt install libpcl-dev5.pangolin的安装
依次输入命令,进入刚刚下载好的源文件目录,并进行安装。
git clone https://github.com/stevenlovegrove/Pangolin.git
makdir build && cd build
cmake ..
sudo make install
6.lidar2camera
首先
git clone https://github.com/PJLab-ADG/SensorsCalibration/tree/master/lidar2camera然后
# mkdir build
mkdir -p build && cd build
# build
cmake .. && make三、测试运行
cd ~./manual_calib/
./bin/run_lidar2camera data/0.png data/0.pcd data/center_camera-intrinsic.json data/top_center_lidar-to-center_camera-extrinsic.json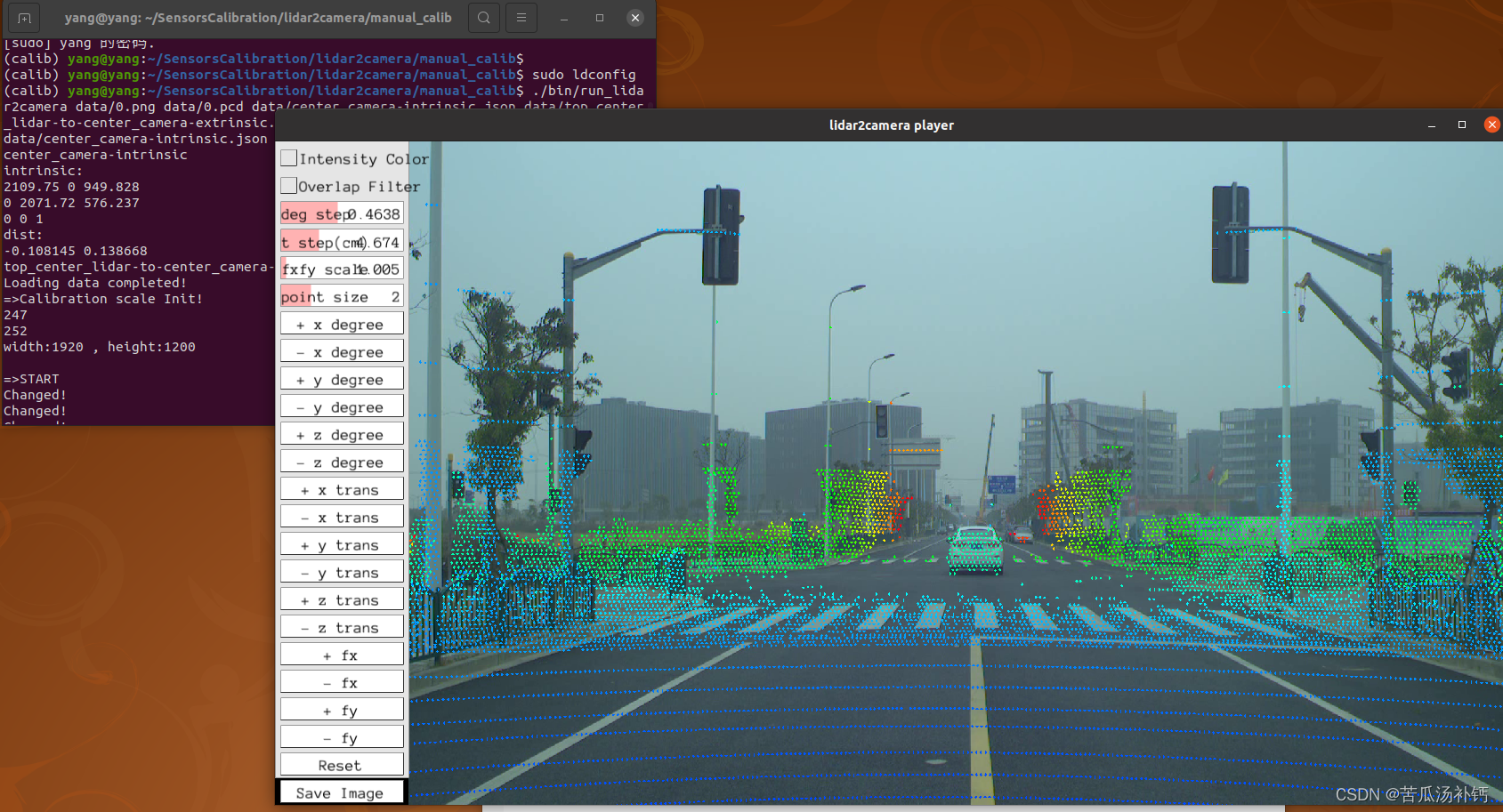
选择Save Image,自动保存图片与相关信息。

四、出现过的问题
因为我开始安装的时候创建了一个calib的虚拟环境,所以无法正常运行,切换环境后即可。