前言:Hello大家好,我是小哥谈。目标检测评价指标是用来衡量目标检测算法性能的指标,主要包括几个指标:精确率(Precision)、召回率(Recall)、交并比(IoU)、平均精度(AP)和多个类别AP的平均值即mAP等等。本节课就给大家重点介绍下目标检测中的相关评价指标及其含义,希望大家学习之后能够有所收获!🌈
 前期回顾:
前期回顾:
第1篇 目标检测概述 —(1)目标检测基础知识
第1篇 目标检测概述 —(2)目标检测算法介绍
目录
🚀1.目标检测有哪些评价指标?
🚀2.评价指标详解
💥💥2.1 Precision(精确率)
💥💥2.2 Recall(召回率 )
💥💥2.3 Average Precision(平均精确率)
💥💥2.4 Mean Average Precision (mAP)(平均精确率均值)
💥💥2.5 mAP@0.5
💥💥2.6 mAP@0.5:0.95
💥💥2.7 ROC曲线
💥💥2.8 P-R曲线
💥💥2.9 IoU(交并比)
💥💥2.10 mIoU(平均交并比)
💥💥2.11 FPS(每秒传输帧数)
💥💥2.12 FLOPS(每秒浮点运算次数)
🚀3.参考文章

🚀1.目标检测有哪些评价指标?
目标检测评价主要包括几个指标:精确率(Precision)、召回率(Recall)、交并比(IoU)、平均精度(AP)和多个类别AP的平均值即mAP等等。其中,精确率指的是检测出的目标中真正为目标的比例,召回率指的是所有真正为目标的样本中被检测出来的比例,交并比指的是检测框与真实框的交集面积与并集面积的比值,平均精度指的是不同置信度下的精确率与召回率的曲线下面积,而mAP则是多个类别AP的平均值。这些指标可以通过混淆矩阵来计算。在实际应用中,我们需要根据具体的场景和需求选择合适的评价指标来评估模型的性能。
具体含义如下所示:
- Precision(精确率):表示模型预测的正样本中真实正样本的比例,计算公式为:Precision = TP / (TP + FP),其中 TP 表示真正例(模型正确检测的正样本数),FP 表示假正例(模型错误检测的正样本数)。
- Recall(召回率):表示模型正确检测的正样本数占所有真实正样本的比例,计算公式为:Recall = TP / (TP + FN),其中 FN 表示假负例(模型未能检测到的正样本数)。
- Intersection over Union (IoU)(交并比):计算检测框和真实框之间的重叠程度,常用于衡量目标检测的准确性。IoU 的计算公式为:IoU = (Detection ∩ Ground Truth) / (Detection ∪ Ground Truth)。
- Average Precision(平均精确率):结合了不同置信度下的 Precision 和 Recall,通过计算 Precision-Recall 曲线下的面积来衡量模型的性能。
- Mean Average Precision (mAP)(平均精确率均值):计算不同类别的 Average Precision 的平均值,是目标检测中常用的评价指标之一。
- ROC曲线(Receiver Operating Characteristic curve):ROC曲线是以假阳性率(False Positive Rate)为横轴,真阳性率(True Positive Rate)为纵轴绘制的曲线,用于衡量模型在不同阈值下的性能。
- P-R曲线(Precision-Recall curve):P-R曲线是以查准率为横轴,查全率为纵轴绘制的曲线,用于衡量模型在不同阈值下的性能。
等等......🍉 🍓 🍑 🍈 🍌 🍐
🚀2.评价指标详解
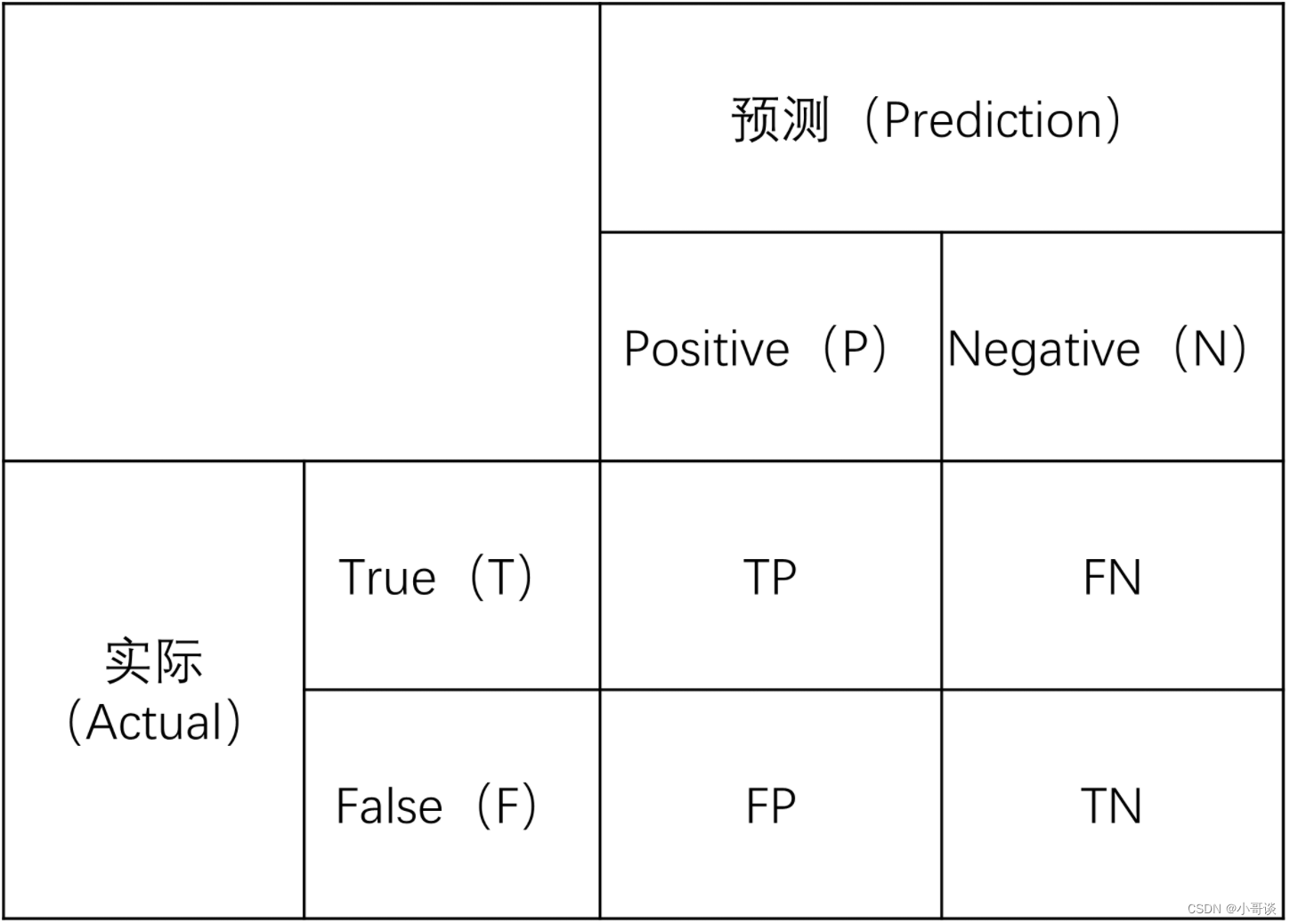
在目标检测相关博客或论文中,经常看到一堆简写:TP、TN、FP、FN,这些是什么含义呢?它们的含义具体如下:👇
- 预测值为正例,记为P(Positive)
- 预测值为反例,记为N(Negative)
- 预测值与真实值相同,记为T(True)
- 预测值与真实值相反,记为F(False)
那么从上面可以知道:
- TP:真实为正样本,预测也为正样本,又称(真阳性)。
- FN:真实为正样本,预测为负样本,又称(假阴性)。
- FP:真实为负样本,预测为正样本,又称(假阳性)。
- TN:真实为负样本,预测为负样本,又称(真阴性)。
知道了这几个定义,下面就好理解了。✅
💥💥2.1 Precision(精确率)
Precision(精确率)是指在所有被分类器预测为正例的样本中,真正为正例的样本所占的比例。简单来说,就是分类器预测为正例的样本中,有多少是真正的正例。精确率越高,说明分类器预测为正例的样本中真正为正例的比例越高,分类器的性能越好。精确率的计算公式为:TP/(TP+FP),其中TP表示真正为正例的样本数,FP表示被错误地预测为正例的负例样本数。
公式:
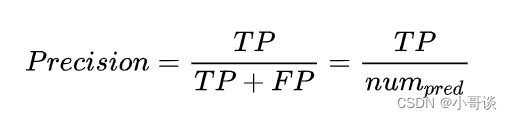
式中,代表一共识别出的物体数量。举例说明:对于口罩人脸检测的一个效果图,图中9个检测框,7个正确检测出口罩,则TP = 7,2 个未正确检测出口罩,则FP = 2 ,参照公式准确率为0.78。
💥💥2.2 Recall(召回率 )
Recall(召回率)是指在所有实际为正样本的样本中,被正确预测为正样本的样本数占比。计算公式为预测样本中实际正样本数/所有的正样本数,即recall=TP/(TP+FN)。其中,TP表示真正例(True Positive),即实际为正样本且被正确预测为正样本的样本数;FN表示假反例(False Negative),即实际为正样本但被错误预测为负样本的样本数。Recall越高,表示模型能够更好地识别出正样本,但同时也可能会将一些负样本错误地预测为正样本。
公式:
表示一共有多少个需要检测的物体。举例说明:如果一共有8个带着口罩的目标,其中7个正确检测出口罩,则TP = 7 ,1个未检测出口罩,则FN = 1 ,根据计算公式,得到召回率为0.875。
💥💥2.3 Average Precision(平均精确率)
Average Precision(平均精确率)是一种用于衡量物体检测算法准确性的指标。它结合了查准率(precision)和召回率(recall)来评估模型在不同阈值下的性能。平均精确率通过计算不同阈值下的查准率,并对其进行平均来得到。它可以反映出模型在不同阈值下的性能变化情况。
在PR曲线图上表现为PR曲线下面的面积。AP的值越大,则说明模型的平均准确率越高。
💥💥2.4 Mean Average Precision (mAP)(平均精确率均值)
Mean Average Precision (mAP)(平均精确率均值)是一种用于评估目标检测算法性能的指标。它是计算每个类别下的 Average Precision (AP) 的平均值。AP 是通过计算在不同召回率水平下的最大精确率来衡量算法在不同目标类别上的准确性。mAP 提供了一个综合性的度量,可以比较和评估不同算法的性能。
💥💥2.5 mAP@0.5
mAP@0.5是指在计算平均精度(mAP)时,使用IoU阈值为0.5。具体而言,mAP@0.5是计算每个类别下所有图片的平均精度,其中IoU阈值设定为0.5。通常情况下,mAP@0.5是用来评估目标检测算法的性能的指标之一。较高的mAP@0.5值表示算法在检测目标时具有更高的准确性。
💥💥2.6 mAP@0.5:0.95
mAP@0.5:0.95是指在IoU阈值从0.5到0.95的范围内,以步长为0.05进行计算的平均mAP。这意味着对于不同的IoU阈值(0.5、0.55、0.6、0.65、0.7、0.75、0.8、0.85、0.9、0.95),计算每个阈值下每个类别的所有图片的AP,并求平均得到的mAP值。
说明:♨️♨️♨️
在目标检测任务中,mAP(mean Average Precision)是一个广泛使用的指标,用于衡量检测模型的性能。其中,mAP@0.5,即在IoU(Intersection over Union)阈值为0.5时的mAP,是最常用的mAP值,也是PASCAL VOC竞赛中使用的标准评价指标。这是因为IoU阈值为0.5是一个相对较宽松的标准,既能够检测出较大的目标,也能检测出较小的目标,因此更能全面评估检测模型的性能。但是,mAP@0.5并不能完全反映出检测模型在不同IoU阈值下的表现。因此,mAP@0.5:0.95这个指标被提出,它是在IoU阈值从0.5到0.95变化时的平均mAP值。这个指标能够更全面地评估模型的性能,因为它考虑了不同IoU阈值下的检测结果。而且,在某些应用场景下,如自动驾驶、安防等,对目标检测的精度要求较高,因此mAP@0.5:0.95更能反映模型的性能。综上所述,mAP@0.5是最常用的mAP指标,但是mAP@0.5:0.95对于某些应用场景更为重要,因为它能够更全面、更准确地评估模型的性能。
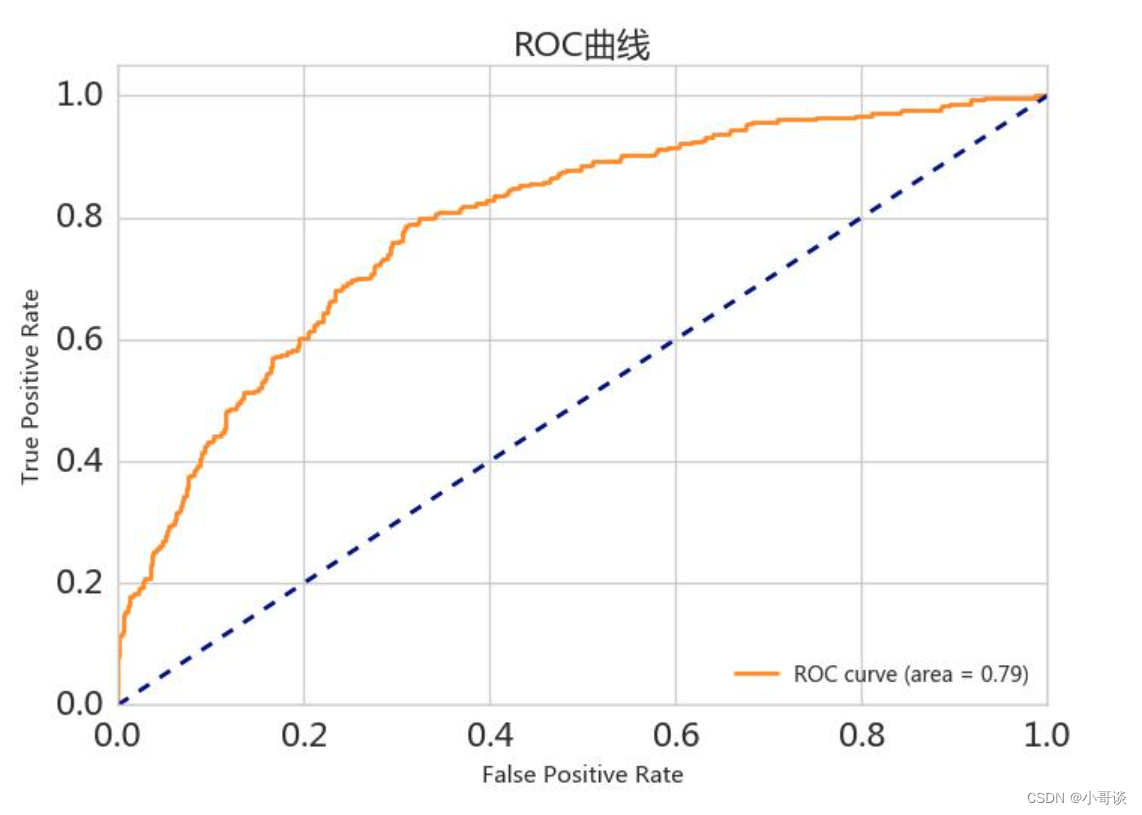
💥💥2.7 ROC曲线
ROC曲线是一种常用的分类模型性能评估方法。它通过绘制真正例率(True Positive Rate,TPR)和假正例率(False Positive Rate,FPR)之间的关系曲线来展示分类器在不同阈值下的表现。TPR表示被正确分类为正例的样本占所有实际正例样本的比例,而FPR则表示被错误分类为正例的样本占所有实际负例样本的比例。ROC曲线的横坐标为FPR,纵坐标为TPR,曲线越靠近左上角,说明分类器的性能越好。
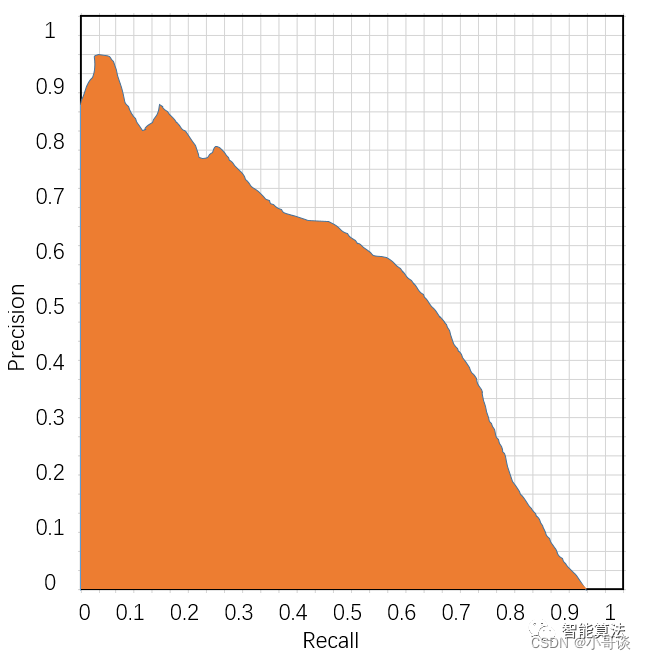
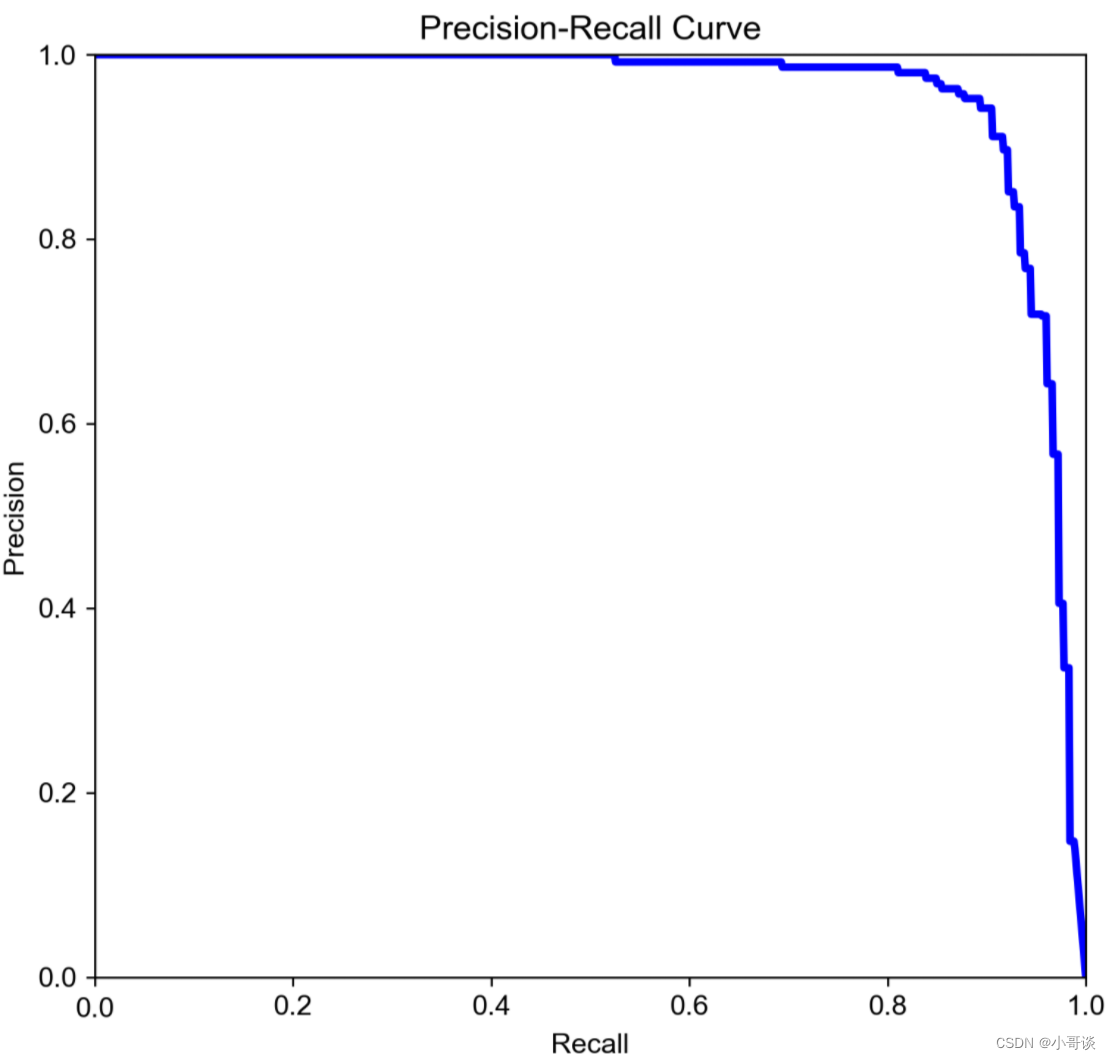
💥💥2.8 P-R曲线
P-R曲线是指Precision-Recall曲线,用于评估分类模型的性能。横坐标为Recall(召回率),纵坐标为Precision(精确率)。P-R曲线反映了在不同召回率下模型的精确率变化情况。通常情况下,P-R曲线越靠近右上角,模型的性能越好。
💥💥2.9 IoU(交并比)
IoU是指交并比(Intersection over Union),即预测框(prediction)和实际目标(ground truth)的交集和并集的比值,用以确定预测目标的置信度。当一个预测框的IoU大于某个阈值时才认定其为正分类(一般为0.5或0.3)。最理想情况下,完全重叠时,IoU的值为1。
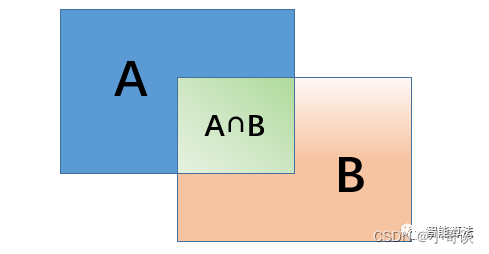
上图中假设A为模型的检测结果,B为Ground Truth即样本的标注结果,那么A与B相交的区域即为A∩B,而A与B的并集即为AB共有的区域A∪B,那么IoU的计算公式即为: IoU = (A∩B) / (A∪B)
这个还是很简单就能理解的,反应到样本图上就如下图:
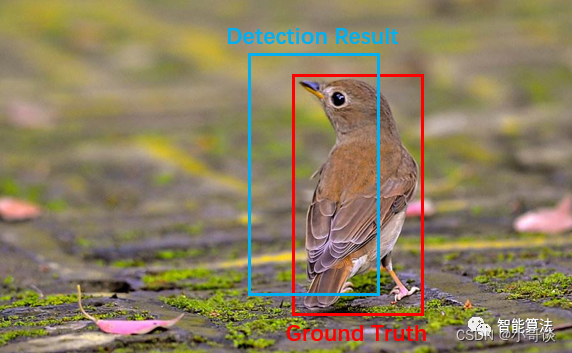
其中上图蓝色框框为检测结果,红色框框为真实标注。一般情况下对于检测框的判定都会存在一个阈值,也就是IoU的阈值,一般可以设置当IoU的值大于0.5的时候,则可认为检测到目标物体。
💥💥2.10 mIoU(平均交并比)
mIoU,即平均交并比(Mean Intersection over Union),是一种用于评估语义分割任务中预测结果与真实标签相似度的常用指标。它通过计算每个类别的交并比(IoU),并对所有类别的IoU取平均值得到。
💥💥2.11 FPS(每秒传输帧数)
FPS是指每秒传输的帧数,用于衡量动画或视频画面的流畅程度。较高的FPS意味着画面更新更频繁,动作更加流畅。一般来说,30帧每秒是为了避免动作不流畅的最低要求。一些计算机视频格式每秒只能提供15帧。此外,FPS也可以理解为刷新率,即屏幕每秒刷新的次数,常用单位为Hz。较高的刷新率可以提供更好的图像显示效果和视觉感观。
💥💥2.12 FLOPS(每秒浮点运算次数)
FLOPS,FLoating point Operations Per Second的缩写,即每秒浮点运算次数,或表示为计算速度,是一个衡量硬件性能的指标。
说明:♨️♨️♨️
FLOPS,浮点数运算,指计算量,越小越好。通俗点讲,指显卡算力,对应英伟达官网的那些:CUDA GPUs - Compute Capability | NVIDIA Developer
🚀3.参考文章
作者:智能算法;文章:【必备】目标检测中的评价指标有哪些?