目录
一、雷达定义
二、天线方向图
四、雷达脉冲合成
五、天气雷达力矩估计
六、仿真结果
6.1反射率
6.2 径向速度
6.3 频谱宽度
6.4 差分反射率
6.5 相关系数
6.6 差分相位
七、总结
八、程序
本示例展示了如何模拟满足天气观测要求的极化多普勒雷达回波。雷达在天气观测、灾害检测、降水分类和量化以及预报方面发挥着关键作用。此外,极化雷达以前所未有的质量和信息提供多参数测量。此示例演示如何模拟扫描分布式天气目标区域的极化多普勒雷达。仿真根据众所周知的NEXRAD雷达规范推导出雷达参数。合成接收到的脉冲后,进行雷达频谱矩估计和极化矩估计。将估计值与NEXRAD基本事实进行比较,从中获得误差统计数据并评估数据质量。
一、雷达定义
一个著名的天气雷达是天气监视雷达,1988年多普勒(WSR-88D),也称为NEXRAD。 雷达系统规格设计如下。
max_range = 100e3; % Maximum unambiguous range (m)
range_res = 250; % Required range resolution (m)
pulnum = 32; % Number of pulses to process in an azimuth
fc = 2800e6; % Frequency (Hz)
prop_speed = physconst('LightSpeed'); % Propagation speed (m/s)
lambda = prop_speed/fc; % Wavelength (m)为了将这些要求转化为雷达参数,在本例中,为简单起见,加载预先计算的雷达参数。
二、天线方向图
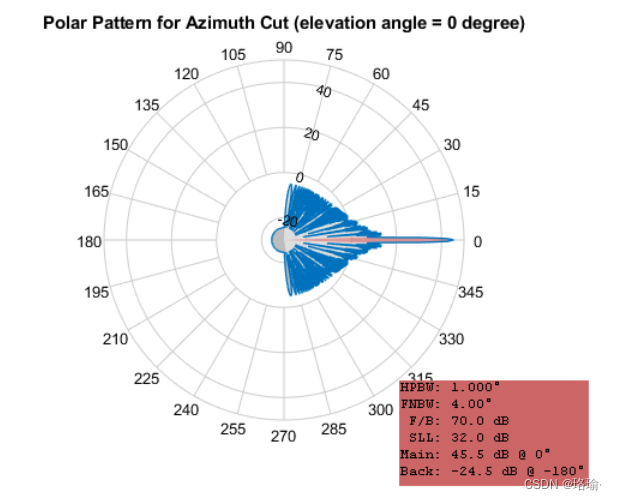
由于NEXRAD是极化特征,因此对天线和天气目标的极化特性进行建模非常重要。根据 NEXRAD 规范,天线方向图的波束宽度约为 1 度,第一旁瓣低于 -30 dB。
绘制天线方向图的方位角切割。
三、天气目标
通常,天气雷达数据分为三个级别。I级数据是原始时间序列I/Q数据,作为雷达数据采集单元中信号处理器的输入。II级数据由信号处理器输出的雷达光谱矩(反射率、平均径向速度和频谱宽度)和极化矩(差分反射率、相关系数和差分相位)组成。III级数据是雷达产品发生器的输出产品数据,如水汽凝结体分类、风暴总降水量、龙卷风涡旋特征等。
在本例中,使用来自 KTLX NEXRAD 雷达在 2013 年 5 月 20 日 20:08:11 UTC 的 II 级数据。这些数据来自俄克拉荷马州摩尔发生的强烈龙卷风,用于生成等效散射中心的平均雷达横截面(RCS)。数据可通过FTP下载获得。它表示体积扫描,其中包括在指定时间段内以预定仰角完成的一系列天线 360 度扫描。在数据文件名KTLX20130520_200811_V06中,KTLX指雷达站名,20130520_200811指采集数据的日期和时间,V06指版本6的数据格式。在此模拟中,从体积扫描数据中提取最低高程切割(0.5 度)作为示例。
将二级数据读入工作区。将其存储在nexrad结构数组中,该数组包含所有雷达力矩以及指定笛卡尔坐标系中每个径向数据点的方位角的方位角的方位角。为简单起见,加载从压缩文件转换为 MAT 文件的 NEXRAD 数据。
根据笛卡尔坐标中的方位角和范围定义感兴趣区域 (AOI)。由于天气目标是极化的并且分布在一个平面中,因此可以通过指定离散方位角的散射矩阵来表示它们。天气目标反射率定义为每单位体积的平均反向散射截面。根据天气雷达方程,可以将天气目标视为每个分辨率体积内小目标的集合。整体反射率可以转换为平均RCS,并被视为等效散射中心。因此,散射矩阵中的每个元素都是相关偏振中RCS的平方根。
四、雷达脉冲合成
使用定义的雷达系统参数生成雷达数据立方体。在每个分辨率体积中,包括适当的相关性,以确保生成的I/Q数据呈现正确的天气信号统计属性。
五、天气雷达力矩估计
使用脉冲对处理,根据相关性估计值计算所有雷达矩,包括反射率、平均径向速度、频谱宽度、差分反射率、相关系数和差分相位。
六、仿真结果
将仿真结果与 NEXRAD 基本事实进行比较。使用误差统计、扇区图像、范围配置文件和散点图评估模拟数据质量。误差统计表示为估计雷达矩与NEXRAD II级数据(真值场)相比的偏差和标准偏差。 定义用于绘制的方位角和范围。
-
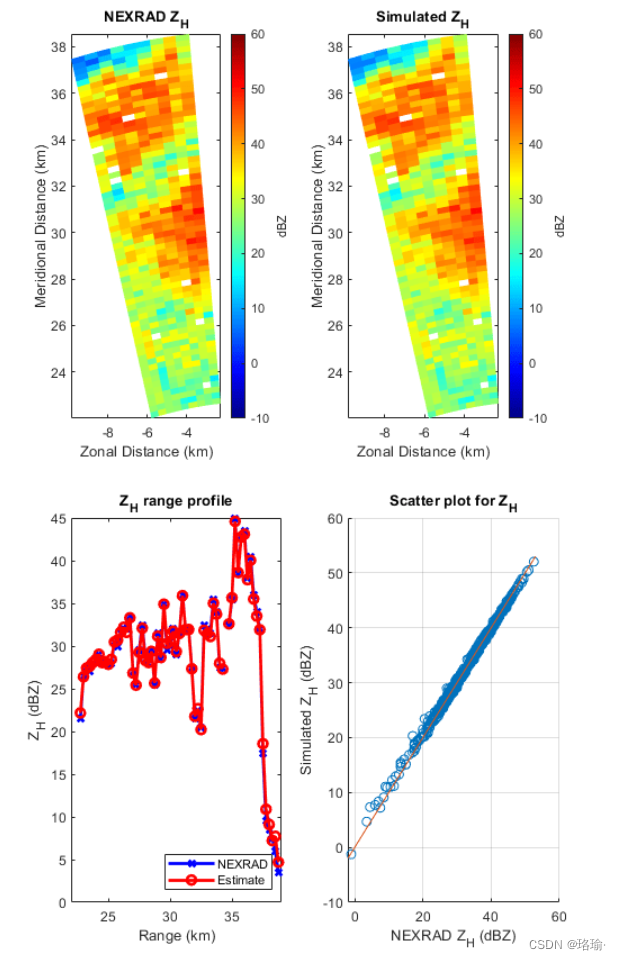
6.1反射率
反射率Z,是多普勒光谱的第零矩,与分辨率体积中的液态水含量或降水速率有关。
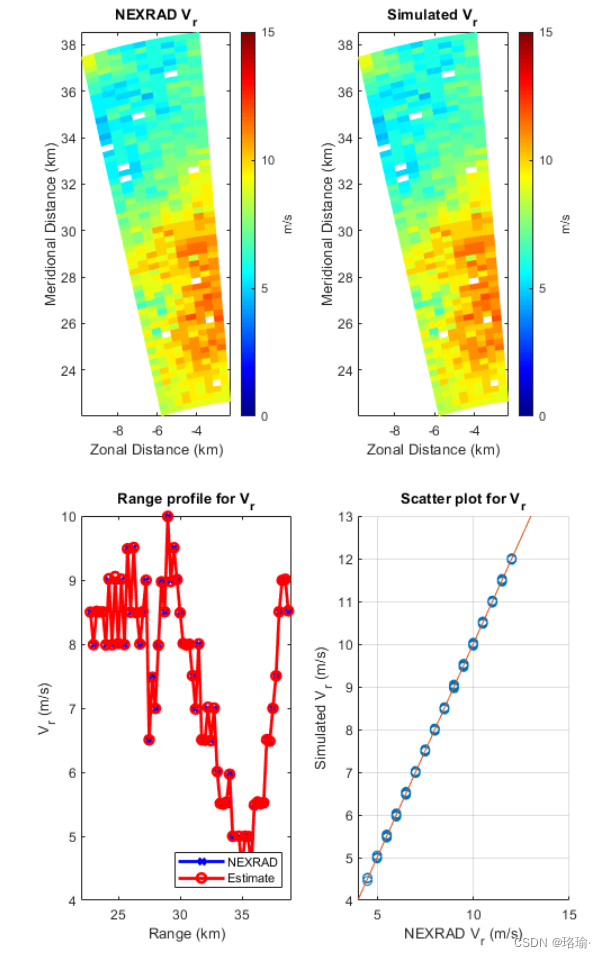
6.2 径向速度
径向速度,V是功率归一化频谱的第一个时刻,它反射朝向或远离雷达的空气运动。
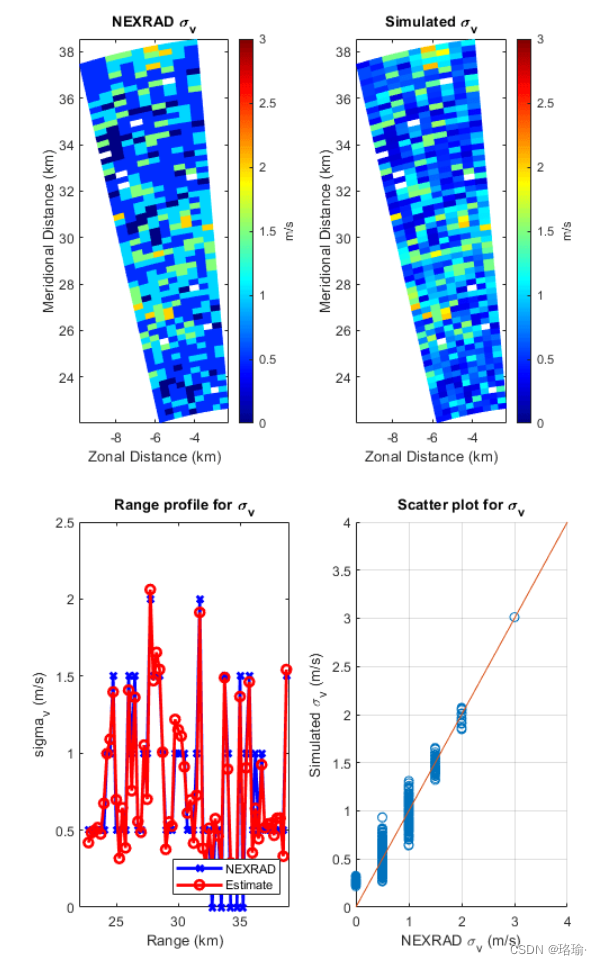
6.3 频谱宽度
谱宽,是归一化谱的第二个矩的平方根。频谱宽度是速度色散的量度,即分辨率体积内的剪切或湍流。
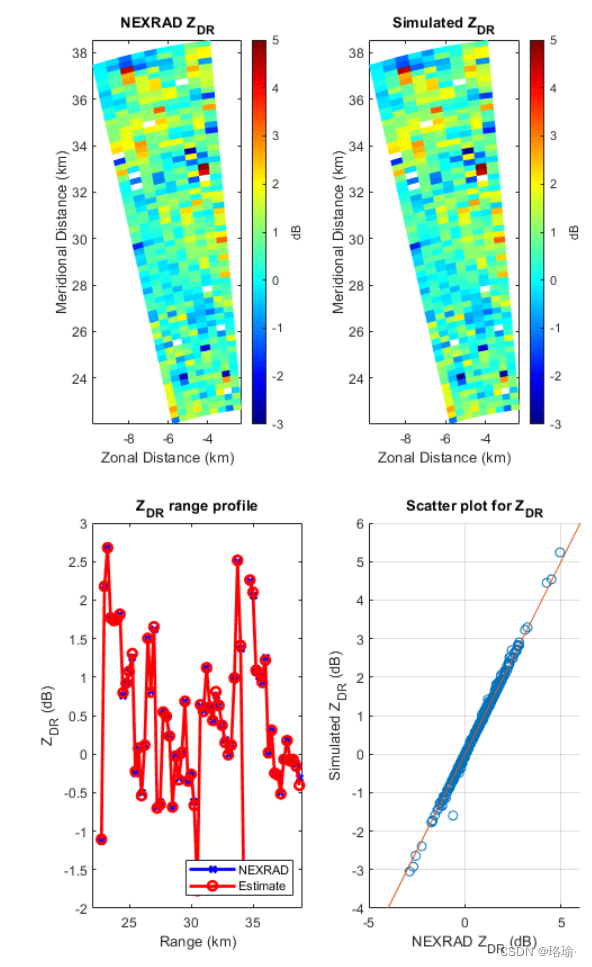
6.4 差分反射率
差分反射率,是根据水平和垂直极化信号的功率估计之比估计的。差分反射率在水凝物分类中很有用。
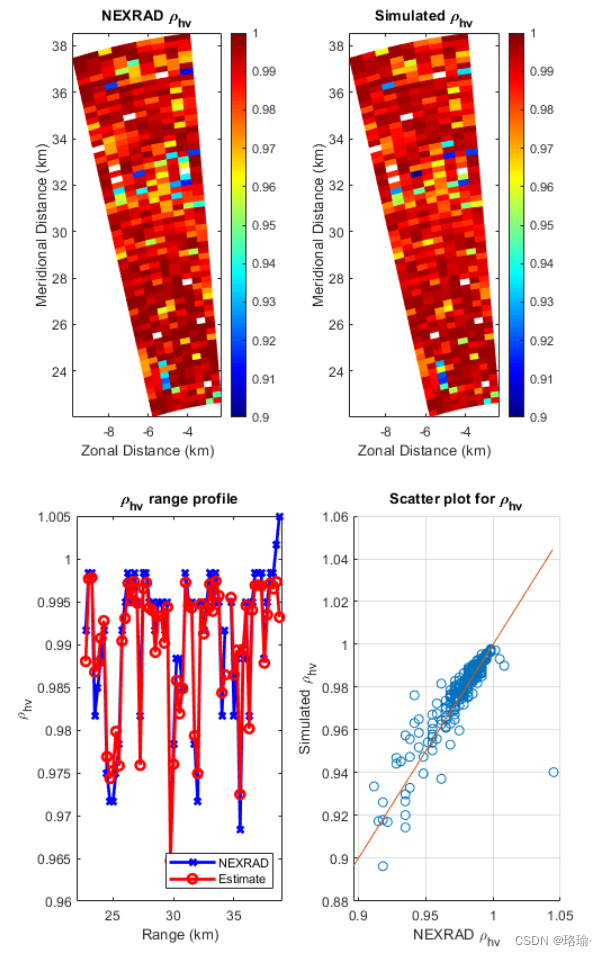
6.5 相关系数
相关系数,表示每个脉冲的水平和垂直返回功率和相位的一致性。相关系数在确定系统性能和对雷达回波类型进行分类方面起着重要作用。
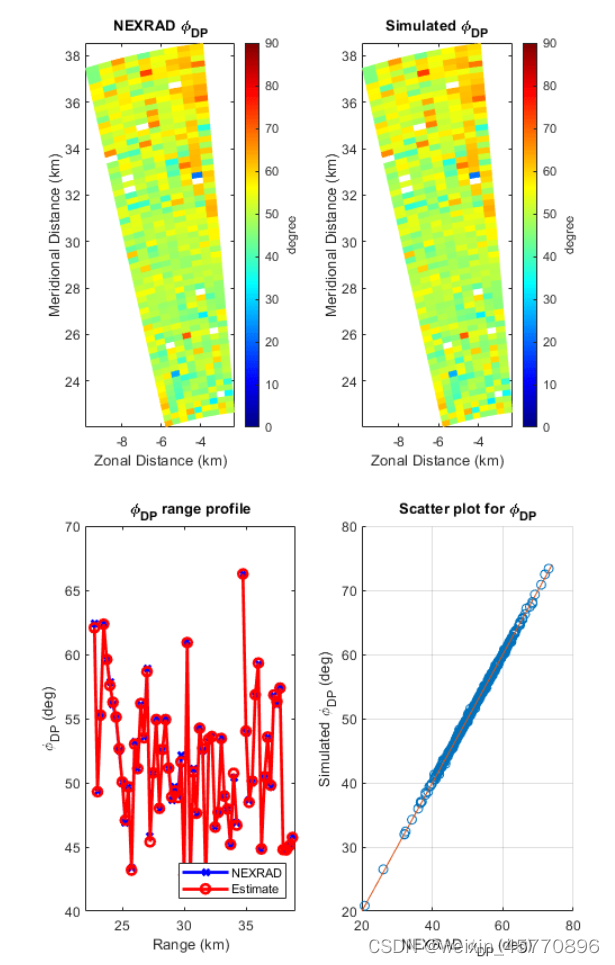
6.6 差分相位
差分相位,是水平和垂直极化返回脉冲的相位延迟之差。差分相位提供有关正在采样的散射体性质的信息。
七、总结
该示例展示了如何模拟来自分布式天气目标区域的极化多普勒雷达回波。视觉比较和误差统计数据显示,估计的雷达矩符合NEXRAD地面实况规格。通过此示例,可以进一步探索其他应用中的仿真时间序列数据,例如波形设计、系统性能研究和天气雷达的数据质量评估。
八、程序
使用Matlab R2022b版本,点击打开。
 打开下面的“WeatherRadarExample.m”文件,点击运行,就可以看到上述效果。
打开下面的“WeatherRadarExample.m”文件,点击运行,就可以看到上述效果。
关注下面公众号,后台回复关键词:模拟用于天气观测的极化雷达回波,发送源码链接。