这里的32控制其实和51的控制思路都是一样的,都是先利用一个网络助手将家里的无线网生成局域网,接着通过花生壳软件将局域网变成公共网,最后是利用串口助手,在4G模块的AT指令模式写入命令AT+SOCK=TCPC,公共网IP地址,公共网端口号,让其连接上公共网。里程如下图所示,具体的细节可以看看我写的51的文章,http://t.csdnimg.cn/P1Pat
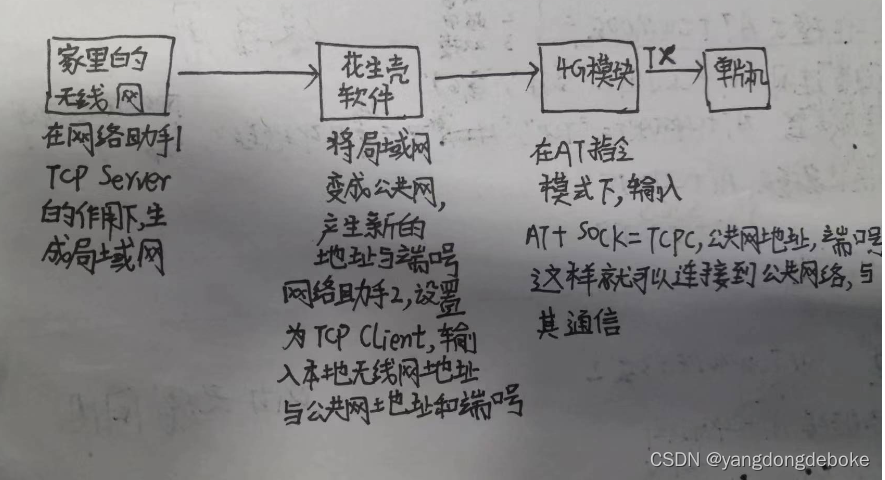
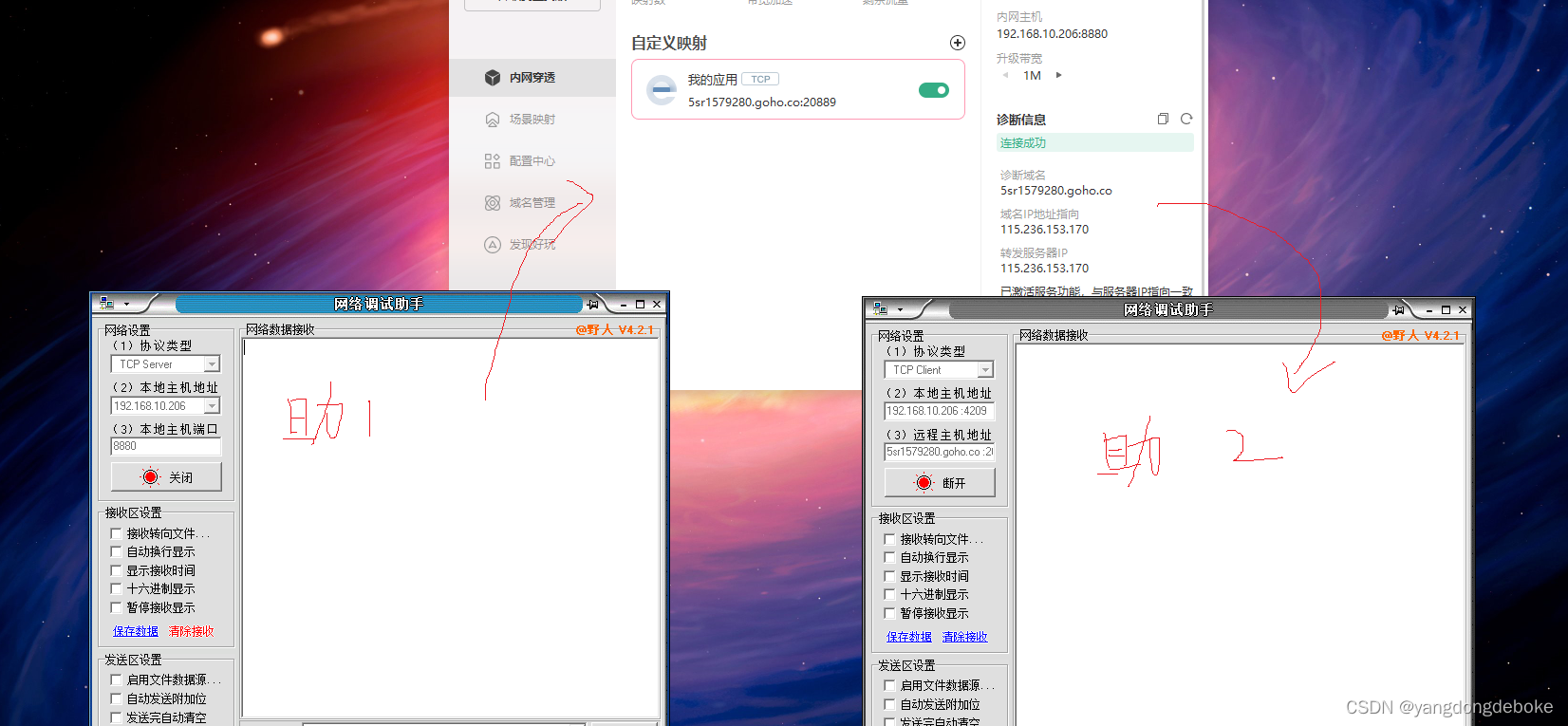
其实说白了,就是局域网受限制,但是变成公共网络之后就不受限制了,接着在与4G模块,就可以实现局域网与4G模块通信了。打个比方,如下图
 局域网想要和4G通讯,但是中间隔了“一堵墙”(实际是两者无法识别),这时候作为“锥子”的花生壳打通了墙(即让局域网变成了公共网),然后二者就可以通讯了,接着4G收到了来自公共网信息(公共网的信息来自生成生成局域网的网络助手1),4G模块通过TX发送给单片机命令,实现控制。
局域网想要和4G通讯,但是中间隔了“一堵墙”(实际是两者无法识别),这时候作为“锥子”的花生壳打通了墙(即让局域网变成了公共网),然后二者就可以通讯了,接着4G收到了来自公共网信息(公共网的信息来自生成生成局域网的网络助手1),4G模块通过TX发送给单片机命令,实现控制。
二、代码部分
51的思路一样,都是单片机接收到数据进入中断,然后开始控制
#include "main.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <stdio.h>
#include <string.h>
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
//串口接收缓存(1字节)
uint8_t buf=0;
//定义最大接收字节数 200,可根据需求调整
#define UART1_REC_LEN 200
// 接收缓冲, 串口接收到的数据放在这个数组里,最大UART1_REC_LEN个字节
uint8_t UART1_RX_Buffer[UART1_REC_LEN];
// 接收状态
// bit15, 接收完成标志
// bit14, 接收到0x0d
// bit13~0, 接收到的有效字节数目
uint16_t UART1_RX_STA=0;
#define SIZE 12
char buffer[SIZE];
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
// 接收完成回调函数,收到一个数据后,在这里处理
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
// 判断中断是由哪个串口触发的
if(huart->Instance == USART1)
{
// 判断接收是否完成(UART1_RX_STA bit15 位是否为1)
if((UART1_RX_STA & 0x8000) == 0)
{
// 如果已经收到了 0x0d (回车),
if(UART1_RX_STA & 0x4000)
{
// 则接着判断是否收到 0x0a (换行)
if(buf == 0x0a)
{
// 如果 0x0a 和 0x0d 都收到,则将 bit15 位置为1
UART1_RX_STA |= 0x8000;
// 灯控指令
if(!strcmp(UART1_RX_Buffer, "L-1"))
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_RESET);
if(!strcmp(UART1_RX_Buffer, "L-0"))
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_8, GPIO_PIN_SET);
memset(UART1_RX_Buffer, 0, UART1_REC_LEN);
UART1_RX_STA = 0;
}
else
// 否则认为接收错误,重新开始
UART1_RX_STA = 0;
}
else // 如果没有收到了 0x0d (回车)
{
//则先判断收到的这个字符是否是 0x0d (回车)
if(buf == 0x0d)
{
// 是的话则将 bit14 位置为1
UART1_RX_STA |= 0x4000;
}
else
{
// 否则将接收到的数据保存在缓存数组里
UART1_RX_Buffer[UART1_RX_STA & 0X3FFF] = buf;
UART1_RX_STA++;
// 如果接收数据大于UART1_REC_LEN(200字节),则重新开始接收
if(UART1_RX_STA > UART1_REC_LEN - 1)
UART1_RX_STA = 0;
}
}
}
// 重新开启中断
HAL_UART_Receive_IT(&huart1, &buf, 1);
}
}
int fputc(int ch, FILE *f)
{
unsigned char temp[1]={ch};
HAL_UART_Transmit(&huart1,temp,1,0xffff);
return ch;
}
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_USART2_UART_Init();
/* USER CODE BEGIN 2 */
HAL_NVIC_SetPriority(SysTick_IRQn,0,0);
// 开启接收中断
HAL_UART_Receive_IT(&huart1, &buf, 1);
HAL_UART_Transmit(&huart2, "let's go\r\n", strlen("let's go\r\n"), 100);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
HAL_Delay(2000);
}
/* USER CODE END 3 */
}最后不要忘记fputc函数的加入,记得在keil里勾选Use Micro LIB

全都弄好后,你会发现,这玩意和蓝牙一个效果,但是它的功能蓝牙强大。



![MyBatis-Plus实现逻辑删除[MyBatis-Plus系列] - 492篇](https://img-home.csdnimg.cn/images/20230724024159.png?origin_url=https%3A%2F%2Fmmbiz.qpic.cn%2Fsz_mmbiz_png%2FP13HW4Fm1HWMAghWyicic7skmicibD1r8KUSeiba8L5HjC7xibgN2oVyoYj3usNq9XYHFSfNT1SR1oCgyCOUDX17yPVQ%2F640&pos_id=suvWq4kU)
![[Spring] SpringBoot2 简介(二)—— 高级配置](https://img-blog.csdnimg.cn/6557465fe9924215af4d669c49f14b44.png)