本文参加极术社区和灵动微电子组织的2022全国大学生物联网设计作品征集活动。
“全国大学生物联网设计竞赛”是以促进国内物联网相关专业建设和人才培养为目标,以物联网技术为核心,激发物联网相关专业学生的创造、创新、创业活力,推动高校创新创业教育而举办的面向大学生的学科竞赛。媒体都对竞赛给予了报道。竞赛形式与内容不断创新,涌现了一大批优秀作品和参赛选手,部分参赛队伍还成功走上了创业的道路,对国内物联网相关专业建设和人才培养起到了积极的促进作用,已经成为国内物联网领域最具规模和影响力的学科竞赛。
华为杯-安谋科技企业命题
竞赛选题:多足仿生机器人
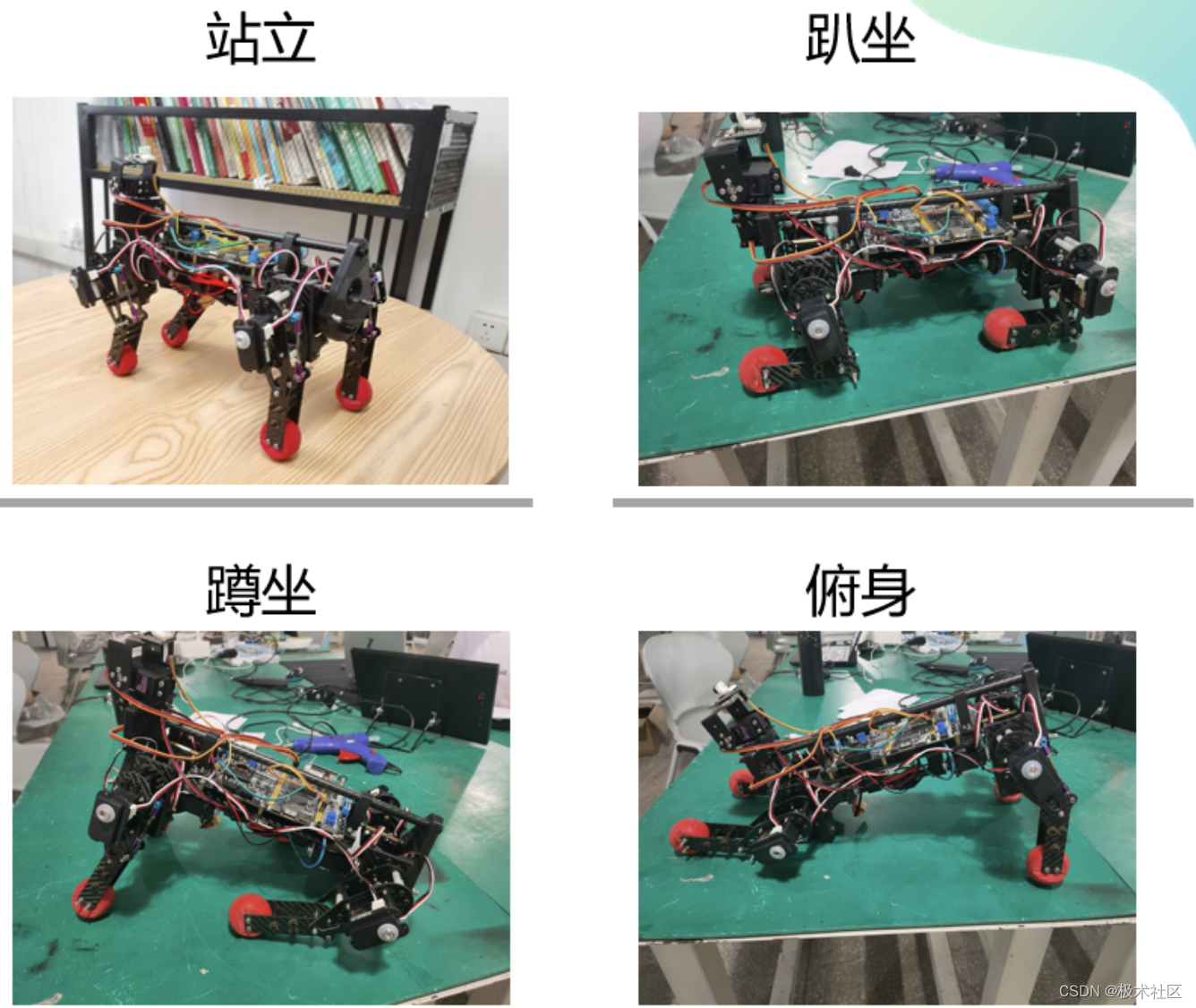
竞赛要求:实现步态模拟,卧伏、前进、后退、左转、右转、左横向平移、右横向平移
团队介绍
参赛单位:合肥工业大学
队伍名称:宛陵轻语
指导老师:吴炜、夏莹
参赛队员:杨博文、王超、李奥、陆金彪
全国总决赛奖项:二等奖
项目介绍
狗属于犬科动物,是饲养率最高的动物,被称为“人类最忠实的朋友”。经过专业培训后,它对气味的辨别能力比人高出百万倍,有在光线微弱条件下视物的能力,成为了百发百中的搜索行家。为了增强犬式仿生四足机器人的仿生性,团队针对犬类的生活习性模仿了犬类运动和符合犬类特性的动作。
团队设计制作的仿生四足机器人机身结构主要由碳纤维管和3D打印件组成。减轻机身重量的同时提升了机身刚度,同时在外观设计上极具犬类的速度感和力量感。
采用串行总线舵机作为驱动单元,大腿关节由舵机直接驱动。小腿控制采用连杆式机构,将置于大腿关节附近的舵机动力传递到小腿。解决了重心不稳、腿部运动惯性影响大的问题,有利于进行后续腿部动作的设计工作。
系统实现
我们采用搭载了安谋科技 Arm China STAR-MC1 内核的 MCU 产品MM32F5270作为核心主控芯片。同时为了实现对机器人多达12个舵机的控制,我们采用飞特舵机驱动板来完成对多舵机的驱动,通过MM32F5277E9PV开发板采用uart与舵机驱动板通讯,调用scservo接口达到对多个舵机的驱动。
MM32F5270作为核心主控芯片通过uart与esp8266通讯获得wifi连接能力,通过网页端发送指令给esp8266执行相应操作。
云台结构搭载espcam,通过对定时器的配置控制两自由度的云台,让espcam实现多角度图像实时传输。
视频演示
https://www.bilibili.com/video/BV1tK411f7zT/?aid=472779116&cid=825208770&page=1
创新优势
- 通过连杆机构将机器人大腿和小腿的控制串行总线舵机都集中在大腿位置平面上,使得仿生四足机器人结构更加紧凑,动作自然,重心稳固。
- 设计优化小跑步态算法,使得犬式四足机器人的运动姿态更加高效自然。
- 设计了网页端控制页面和app端监控页面,可远程监控和控制机器人的运动。
- 装置预留空间及运动能力充足,可进行多种外设的拓展,满足多种使用场景。
应用前景
- 让幼儿更加地了解动物,热爱动物,保护动物,该机构可开发成为新型玩具,可以作为小型桌面级教育机器人。
- 除了本身具备的救援功能。对于多管道和狭小区域等复杂场景,轮式和履带式机器人难以跨越,此时仿生四足机器人能够灵活穿越,结合机身较强的承载能力和可拓展性,工程技术人员可以搭载所需装备,进行管道的巡检。
本犬式仿生四足机器人能够进行远程监控和控制,并搭载了传感器,能够进行特定场景下的巡逻、警示和救援,或者指导居民正确进行核酸检测。
参赛体会
这次有幸能参与全国大学生物联网设计竞赛,并选择了安某科技的赛题让我们学到了很多知识,在这里感谢安某科技和组委会给我们这次比赛的机会,也感谢指导老师给我们的技术支持和鼓励。
点击参与2022年全国大学生物联网设计竞赛优秀作品有奖征集活动扩大作品影响力,获取丰厚礼品和开发板。