文章目录
- 前言
- 一、雷达基础导论
- 二、Matlab 仿真
- 1、SNR 相对检测距离的仿真
- ①、Matlab 源码
- ②、仿真
- 1)、不同 RCS,SNR 相对检测距离仿真
- 2)、不同雷达峰值功率,SNR 相对检测距离仿真
- 2、脉冲宽度相对所要求的 SNR 仿真
- ①、Matlab 源码
- ②、仿真
- 3、功率孔径积相对于距离仿真 及 平均功率相对于孔径大小仿真
- ①、Matlab 源码
- ②、仿真
- 1)、不同 RCS,功率孔径积相对于距离仿真
- 2)、不同 RCS,平均功率相对于孔径大小仿真
- 4、SNR 增益相对积累脉冲数仿真
- ①、Matlab 源码
- ②、仿真
- 三、资源自取
前言
本文对雷达基础导论的内容以思维导图的形式呈现,有关仿真部分进行了讲解实现。
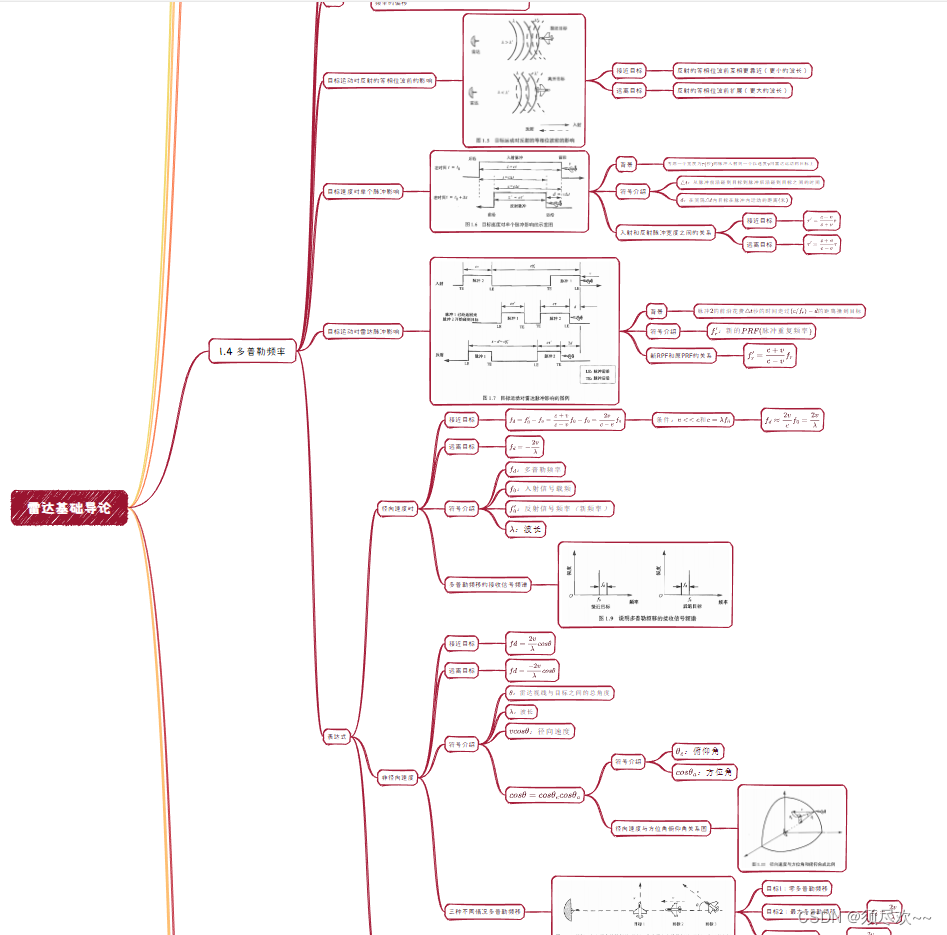
一、雷达基础导论
思维导图如下图所示,如有需求请到文章末尾端自取。
二、Matlab 仿真
1、SNR 相对检测距离的仿真
雷达方程: ( S N R ) o = P t G 2 λ 2 σ ( 4 π ) 3 k T e B F L R 4 (SNR)_o=\frac{P_tG^2 \lambda^2\sigma }{(4\pi)^3kT_eBFLR^4} (SNR)o=(4π)3kTeBFLR4PtG2λ2σ
下面在三种不同数值的 RCS(雷达截面积)和三种不同数值的雷达峰值功率的情况下,对 SNR(信噪比) 相对检测距离的情况进行 Matlab 仿真
①、Matlab 源码
radar_eq.m
function [snr] = radar_eq(pt, freq, g, sigma, te, b, nf, loss, range)
% This program implements Eq. (1.56)
c = 3.0e+8; % speed of light
lambda = c / freq; % wavelength
p_peak = 10*log10(pt); % convert peak power to dB
lambda_sqdb = 10*log10(lambda^2); % compute wavelength square in dB
sigmadb = 10*log10(sigma); % convert sigma to dB
four_pi_cub = 10*log10((4.0 * pi)^3); % (4pi)^3 in dB
k_db = 10*log10(1.38e-23); % Boltzman's constant in dB
te_db = 10*log10(te); % noise temp. in dB
b_db = 10*log10(b); % bandwidth in dB
range_pwr4_db = 10*log10((range).^4); % vector of target range^4 in dB
% Implement Equation (1.56)
num = p_peak + g + g + lambda_sqdb + sigmadb;
den = four_pi_cub + k_db + te_db + b_db + nf + loss + range_pwr4_db;
snr = num - den;
return
相关参数说明:
| 符号 | 描述 | 单位 | 状态 |
|---|---|---|---|
| pt | 峰值功率 | W | 输入 |
| freq | 雷达中心频率 | Hz | 输入 |
| g | 天线增益 | dB | 输入 |
| sigma | 目标截面积 | m 2 m^2 m2 | 输入 |
| te | 有效噪声温度 | K | 输入 |
| b | 带宽 | Hz | 输入 |
| nf | 噪声系数 | dB | 输入 |
| loss | 雷达损失 | dB | 输入 |
| range | 目标距离(单位或矢量) | m | 输入 |
| snr | SNR(单值或矢量,根据输入距离) | dB | 输出 |
函数 “radar.m” 的设计使它对于输入“距离”,可以接受单个数值,或包含很多距离值的矢量
fig1_12.m
close all
clear all
pt = 1.5e+6; % peak power in Watts
freq = 5.6e+9; % radar operating frequency in Hz
g = 45.0; % antenna gain in dB
sigma = 0.1; % radar cross section in m squared
te = 290.0; % effective noise temperature in Kelvins
b = 5.0e+6; % radar operating bandwidth in Hz
nf = 3.0; %noise figure in dB
loss = 6.0; % radar losses in dB
range = linspace(25e3,165e3,1000); % range to target from 25 Km 165 Km, 1000 points
snr1 = radar_eq(pt, freq, g, sigma, te, b, nf, loss, range);
snr2 = radar_eq(pt, freq, g, sigma/10, te, b, nf, loss, range);
snr3 = radar_eq(pt, freq, g, sigma*10, te, b, nf, loss, range);
% plot SNR versus range
figure(1)
rangekm = range ./ 1000;
plot(rangekm,snr3,'k',rangekm,snr1,'k -.',rangekm,snr2,'k:')
grid
legend('\sigma = 0 dBsm','\sigma = -10dBsm','\sigma = -20 dBsm')
xlabel ('Detection range - Km');
ylabel ('SNR - dB');
snr1 = radar_eq(pt, freq, g, sigma, te, b, nf, loss, range);
snr2 = radar_eq(pt*.4, freq, g, sigma, te, b, nf, loss, range);
snr3 = radar_eq(pt*1.8, freq, g, sigma, te, b, nf, loss, range);
figure (2)
plot(rangekm,snr3,'k',rangekm,snr1,'k -.',rangekm,snr2,'k:')
grid
legend('Pt = 2.16 MW','Pt = 1.5 MW','Pt = 0.6 MW')
xlabel ('Detection range - Km');
ylabel ('SNR - dB');
②、仿真
仿真参数默认如下:
峰值功率
P
t
=
1.5
P_t=1.5
Pt=1.5 MW,工作频率
f
0
=
5.6
f_0=5.6
f0=5.6 GHz,天线增益
G
=
45
G=45
G=45 dB,有效温度
T
e
=
290
T_e=290
Te=290 K,雷达损失
L
=
6
L=6
L=6 dB,噪声系数
F
=
3
F=3
F=3 dB,雷达带宽
B
=
5
B=5
B=5 MHz,雷达最小和最大检测距离是
R
m
i
n
=
25
R_{min}=25
Rmin=25 km 和
R
m
a
x
=
165
R_{max}=165
Rmax=165 km,假定目标截面积
σ
=
0.1
\sigma=0.1
σ=0.1
m
2
m^2
m2
1)、不同 RCS,SNR 相对检测距离仿真

注:分贝平方米(dBsm):用雷达散射截面的对数值的十倍来表示,符号是σ dBsm,单位是分贝平方米(dBsm),即σ dBsm=10lgσ。例如,RCS 值 0.1 平方米对应的是 -10 分贝平方米(即 -10dBsm)。
结论:从图中可以看到 RCS(雷达截面积)越大,雷达信噪比越大,且随着距离的增加,雷达信噪比逐渐减小;
2)、不同雷达峰值功率,SNR 相对检测距离仿真
结论:从图中可以看到雷达峰值功率越大,雷达信噪比越大,且随着距离的增加,雷达信噪比逐渐减小
2、脉冲宽度相对所要求的 SNR 仿真
雷达检测门限: ( S N R ) o m a x = P t G 2 λ 2 σ ( 4 π ) 3 k T e B F L R m a x 4 (SNR)_{o_{max}}=\frac{P_tG^2\lambda^2\sigma}{(4\pi)^3kT_eBFLR^4_{max}} (SNR)omax=(4π)3kTeBFLRmax4PtG2λ2σ
可以推出脉冲宽度 τ = ( 4 π ) 3 k T e F L R 4 S N R P t G 2 λ 2 σ \tau=\frac{(4\pi)^3kT_eFLR^4SNR}{P_tG^2\lambda^2\sigma} τ=PtG2λ2σ(4π)3kTeFLR4SNR
下面在三种不同的检测距离数值的情况下,对脉冲宽度相对所要求 SNR(信噪比)的情况进行 Matlab 仿真
①、Matlab 源码
fig1_13.m
close all
clear all
pt = 1.e+6; % peak power in Watts
freq = 5.6e+9; % radar operating frequency in Hz
g = 40.0; % antenna gain in dB
sigma = 0.1; % radar cross section in m squared
te =300.0; % effective noise temperature in Kelvins
nf = 5.0; %noise figure in dB
loss = 6.0; % radar losses in dB
range = [75e3,100e3,150e3]; % three range values
snr_db = linspace(5,20,200); % SNR values from 5 dB to 20 dB 200 points
snr = 10.^(0.1.*snr_db); % convert snr into base 10
gain = 10^(0.1*g); %convert antenna gain into base 10
loss = 10^(0.1*loss); % convert losses into base 10
F = 10^(0.1*nf); % convert noise figure into base 10
lambda = 3.e8 / freq; % compute wavelength
% Implement Eq.(1.57)
den = pt * gain * gain * sigma * lambda^2;
num1 = (4*pi)^3 * 1.38e-23 * te * F * loss * range(1)^4 .* snr;
num2 = (4*pi)^3 * 1.38e-23 * te * F * loss * range(2)^4 .* snr;
num3 = (4*pi)^3 * 1.38e-23 * te * F * loss * range(3)^4 .* snr;
tau1 = num1 ./ den ;
tau2 = num2 ./ den;
tau3 = num3 ./ den;
% plot tau versus snr
figure(1)
semilogy(snr_db,1e6*tau1,'k',snr_db,1e6*tau2,'k -.',snr_db,1e6*tau3,'k:')
grid
legend('R = 75 Km','R = 100 Km','R = 150 Km')
xlabel ('Minimum required SNR - dB');
ylabel ('\tau (pulse width) in \mu sec');
②、仿真
仿真参数参考上面代码
以下为不同检测距离,脉冲宽度相对所要求的 SNR 仿真

结论:从图中可以看到随着雷达 SNR 的增加,脉冲宽度逐渐增大;对应于同一雷达 SNR,距离越远所需要的脉冲宽度越宽
3、功率孔径积相对于距离仿真 及 平均功率相对于孔径大小仿真
搜索雷达方程: S N R = P a v A σ 4 π k T e F L R 4 T s c Ω SNR=\frac{P_{av}A\sigma}{4\pi kT_eFLR^4}\frac{T_{sc}}{\Omega} SNR=4πkTeFLR4PavAσΩTsc
功率孔径积: P a v A P_{av}A PavA
①、Matlab 源码
power_aperture.m
function PAP = power_aperture(snr,tsc,sigma,range,te,nf,loss,az_angle,el_angle)
% This program implements Eq. (1.67)
Tsc = 10*log10(tsc); % convert Tsc into dB
Sigma = 10*log10(sigma); % convert sigma to dB
four_pi = 10*log10(4.0 * pi); % (4pi) in dB
k_db = 10*log10(1.38e-23); % Boltzman's constant in dB
Te = 10*log10(te); % noise temp. in dB
range_pwr4_db = 10*log10(range.^4); % target range^4 in dB
omega = (az_angle/57.296) * (el_angle / 57.296); % compute search volume in steraradians
Omega = 10*log10(omega); % search volume in dB
% implement Eq. (1.67)
PAP = snr + four_pi + k_db + Te + nf + loss + range_pwr4_db + Omega ...
- Sigma - Tsc;
return
相关参数说明:
| 符号 | 描述 | 单位 | 状态 |
|---|---|---|---|
| snr | 灵敏度snr | dB | 输入 |
| tsc | 扫描时间 | s | 输入 |
| sigma | 目标截面积 | m 2 m^2 m2 | 输入 |
| range | 目标距离(单位或矢量) | m | 输入 |
| te | 有效噪声温度 | K | 输入 |
| nf | 噪声系数 | dB | 输入 |
| loss | 雷达损失 | dB | 输入 |
| az_angle | 搜索区域的方位角范围 | ∘ ^\circ ∘ | 输入 |
| el_angle | 搜索区域的俯仰角范围 | ∘ ^\circ ∘ | 输入 |
| PAP | 功率孔径积 | dB | 输出 |
fig1_16.m
close all
clear all
tsc = 2.5; % Scan time i s2.5 seconds
sigma = 0.1; % radar cross section in m sqaured
te = 900.0; % effective noise temperature in Kelvins
snr = 15; % desired SNR in dB
nf = 6.0; %noise figure in dB
loss = 7.0; % radar losses in dB
az_angle = 2; % search volume azimuth extent in degrees
el_angle = 2; %serach volume elevation extent in degrees
range = linspace(20e3,250e3,1000); % range to target from 20 Km 250 Km, 1000 points
pap1 = power_aperture(snr,tsc,sigma/10,range,te,nf,loss,az_angle,el_angle);
pap2 = power_aperture(snr,tsc,sigma,range,te,nf,loss,az_angle,el_angle);
pap3 = power_aperture(snr,tsc,sigma*10,range,te,nf,loss,az_angle,el_angle);
% plot power aperture prodcut versus range
% figure 1.16a
figure(1)
rangekm = range ./ 1000;
plot(rangekm,pap1,'k',rangekm,pap2,'k -.',rangekm,pap3,'k:')
grid
legend('\sigma = -20 dBsm','\sigma = -10dBsm','\sigma = 0 dBsm')
xlabel ('Detection range in Km');
ylabel ('Power aperture product in dB');
% generate Figure 1.16b
lambda = 0.03; % wavelength in meters
G = 45; % antenna gain in dB
ae = linspace(1,25,1000);% aperture size 1 to 25 meter squared, 1000 points
Ae = 10*log10(ae);
range = 250e3; % rnage of interset is 250 Km
pap1 = power_aperture(snr,tsc,sigma/10,range,te,nf,loss,az_angle,el_angle);
pap2 = power_aperture(snr,tsc,sigma,range,te,nf,loss,az_angle,el_angle);
pap3 = power_aperture(snr,tsc,sigma*10,range,te,nf,loss,az_angle,el_angle);
Pav1 = pap1 - Ae;
Pav2 = pap2 - Ae;
Pav3 = pap3 - Ae;
figure(2)
plot(ae,Pav1,'k',ae,Pav2,'k -.',ae,Pav3,'k:')
grid
xlabel('Aperture size in square meters')
ylabel('Pav in dB')
legend('\sigma = -20 dBsm','\sigma = -10dBsm','\sigma = 0 dBsm')
②、仿真
仿真参数默认如下:
| σ \sigma σ | T s c T_{sc} Tsc | θ e = θ a \theta_e=\theta_a θe=θa | R | T_e | n f ∗ l o s s nf*loss nf∗loss | s n r snr snr |
|---|---|---|---|---|---|---|
| 0.1 m 2 0.1m^2 0.1m2 | 2.5 s 2.5s 2.5s | 2 ∘ 2^\circ 2∘ | 252 k m 252km 252km | 900 K 900K 900K | 13 d B 13dB 13dB | 15 d B 15dB 15dB |
1)、不同 RCS,功率孔径积相对于距离仿真
结论:从图中可以看到随着检测距离的增加,功率孔径积增大;雷达 RCS 越大,功率孔径积也越小
2)、不同 RCS,平均功率相对于孔径大小仿真
结论:从图中可以看到随着雷达孔径大小的增加,雷达平均功率呈现下降趋势;雷达 RCS 越大,雷达孔径越小
4、SNR 增益相对积累脉冲数仿真
- 相干积累: ( S N R ) C I = n p ( S N R ) 1 (SNR)_{CI}=n_p(SNR)_1 (SNR)CI=np(SNR)1
- 非相干积累:
(
S
N
R
)
1
=
(
S
N
R
)
N
C
I
2
n
p
+
(
S
N
R
N
C
I
2
)
4
N
P
2
+
(
S
N
R
)
(
N
C
I
)
n
p
(SNR)_1=\frac{(SNR)_{NCI}}{2n_p}+\sqrt{\frac{(SNR_{NCI}^2)}{4N_P^2}+\frac{(SNR)_(NCI)}{n_p}}
(SNR)1=2np(SNR)NCI+4NP2(SNRNCI2)+np(SNR)(NCI)
( S N R ) N C I = n p ( S N R ) 1 L N C I (SNR)_{NCI}=\frac{n_p(SNR)_1}{L_{NCI}} (SNR)NCI=LNCInp(SNR)1
注: ( S N R ) 1 (SNR)_1 (SNR)1 是产生给定检测概率所要求的单个脉冲的SNR
①、Matlab 源码
pulse_integration.m
function [snrout] = pulse_integration(pt, freq, g, sigma, te, b, nf, loss, range,np,ci_nci)
snr1 = radar_eq(pt, freq, g, sigma, te, b, nf, loss, range) % single pulse SNR
snr1=0
if (ci_nci == 1) % coherent integration
snrout = snr1 + 10*log10(np);
else % non-coherent integration
if (ci_nci == 2)
snr_nci = 10.^(snr1./10);
val1 = (snr_nci.^2) ./ (4.*np.*np);
val2 = snr_nci ./ np;
val3 = snr_nci ./ (2.*np);
SNR_1 = val3 + sqrt(val1 + val2); % Equation 1.87 of text
LNCI = (1+SNR_1) ./ SNR_1; % Equation 1.85 of text
snrout = snr1 + 10*log10(np) - 10*log10(LNCI);
end
end
return
相关参数说明:
| 符号 | 描述 | 单位 | 状态 |
|---|---|---|---|
| pt | 峰值功率 | W | 输入 |
| freq | 雷达中心频率 | Hz | 输入 |
| g | 天线增益 | dB | 输入 |
| sigma | 目标截面积 | m 2 m^2 m2 | 输入 |
| te | 有效噪声温度 | K | 输入 |
| b | 带宽 | Hz | 输入 |
| nf | 噪声系数 | dB | 输入 |
| loss | 雷达损失 | dB | 输入 |
| range | 目标距离(单位或矢量) | m | 输入 |
| np | 积累脉冲数 | 无 | 输入 |
| ci_nci | 1是CI;2是NCI | 无 | 输入 |
| snr | SNR(单值或矢量,根据输入距离) | dB | 输出 |
fig1_21.m
clear all
close all
np = linspace(1,10000,1000);
snrci = pulse_integration(4,94.e9,47,20,290,20e6,7,10,5.01e3,np,1);
snrnci = pulse_integration(4,94.e9,47,20,290,20e6,7,10,5.01e3,np,2);
semilogx(np,snrci,'k',np,snrnci,'k:')
legend('Coherent integration','Non-coherent integration')
grid
xlabel ('Number of integrated pulses');
ylabel ('SNR - dB');
②、仿真
仿真参数见上面源码
一般情况下 SNR 改善相对脉冲积累数
结论:从图中可以看到随着积累脉冲数的增加,雷达信噪比逐渐增大;且当积累脉冲数相等时,相干积累信噪比大于非相干积累信噪比
三、资源自取
雷达基础导论.pdf
我的qq:2442391036,欢迎交流!