商用车自动驾驶率先进入商业化运营阶段,这主要是由于商用车对价格的敏感度更低、B端付费意愿更高,以及场景交通复杂程度较低和政策鼓励等因素。在矿区、港口、干线物流、机场、物流园区等细分场景,高级别自动驾驶正在孕育新市场。其中,干线物流、矿区、港口三大场景因人力资源不足和安全事故频发等痛点明显,降本增效成果显著,商业化落地进程较快,头部企业已经基本进入商业化运营阶段。自动驾驶技术正在不断发展和成熟,但仍面临着众多挑战。同时,在不同领域的应用也在不断探索和拓展,然而激光雷达在各领域的应用都是至关重要的。
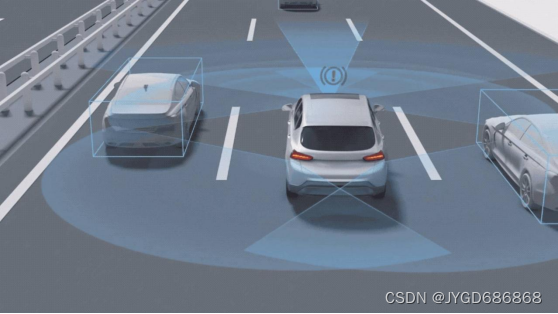
激光雷达可以通过以下步骤检测和识别前方障碍物:
1.扫描周围环境:
激光雷达发射激光束并接收从物体反射回来的激光信号,通过计算激光束发射和反射之间的时间差,可以计算出物体与激光雷达之间的距离。通过旋转激光雷达扫描周围环境,可以获取周围环境的3D/4D点云数据。
2.障碍物检测:
在获取周围环境的点云数据后,激光雷达可以对点云数据进行处理和分析,以检测和识别障碍物。一种常见的方法是采用点云滤波和分割的方法,去除噪声和冗余信息,并将点云数据划分为不同的区域。
3.障碍物分类和识别:
对于已经检测到的障碍物,激光雷达可以采用分类器和机器学习算法对其进行分类和识别。例如,对于车辆可以识别车辆的类型、品牌、颜色等信息;对于行人可以识别行人的性别、年龄、行为等信息。
4.障碍物跟踪:
激光雷达还可以对障碍物进行跟踪,记录障碍物的运动轨迹和状态信息。例如,在自动驾驶中,激光雷达可以跟踪前方车辆的位置和速度信息,并预测车辆的轨迹和行为。
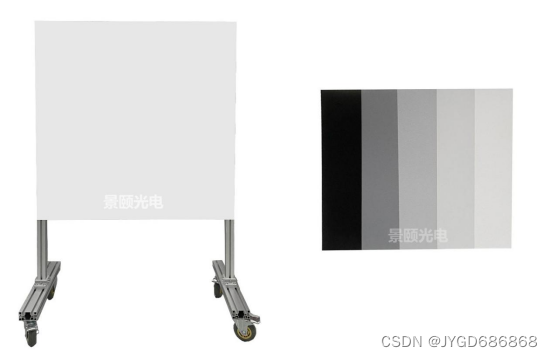
激光雷达通过扫描周围环境、处理点云数据、检测和识别障碍物、对障碍物进行跟踪等方式,为自动驾驶提供重要的障碍物信息,以帮助自动驾驶系统做出更加安全和准确的驾驶决策。景颐光电激光雷达标定板可用于激光雷达的目标距离校准,让激光雷达更精准地判断周围故障物及其运动轨迹。常用于激光雷达定标的反射率有10%、50%和80%,如果定标精度要求比较高,还可定制更多的阶梯反射率。景颐光电漫反射标准板反射率可从1-99%可选,可定制0.05m-3m或以上的不同漫反射板尺寸和形状,均具有近完美的朗伯特性和稳定性,让激光雷达标定得到最优的测试效果。