第一章 STM32 CubeMX (CAN通信)基础篇
文章目录
- 第一章 STM32 CubeMX (CAN通信)基础篇
- STM32中文手册简介
- 简介
- stm32f1系列CAN的特点
- CAN连接网络示意图
- 硬件电路
- CAN波特率计数
- 一、 STM32 CubeMX设置
- 设置波特率
- 工程目录结构
- 添加CAN驱动代码
- 主函数添加代码
- 实验现象
- 总结
STM32中文手册简介
简介

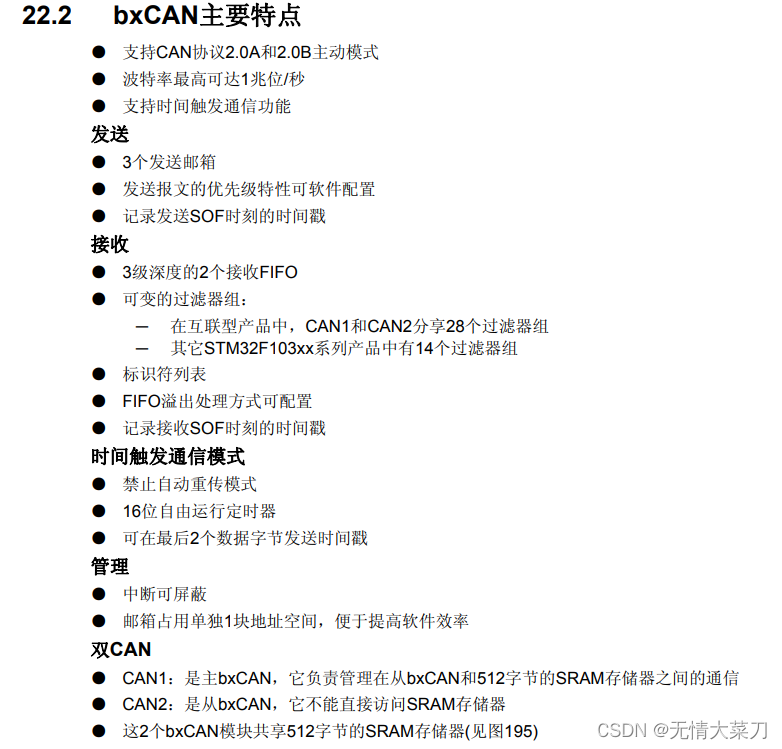
stm32f1系列CAN的特点
CAN连接网络示意图
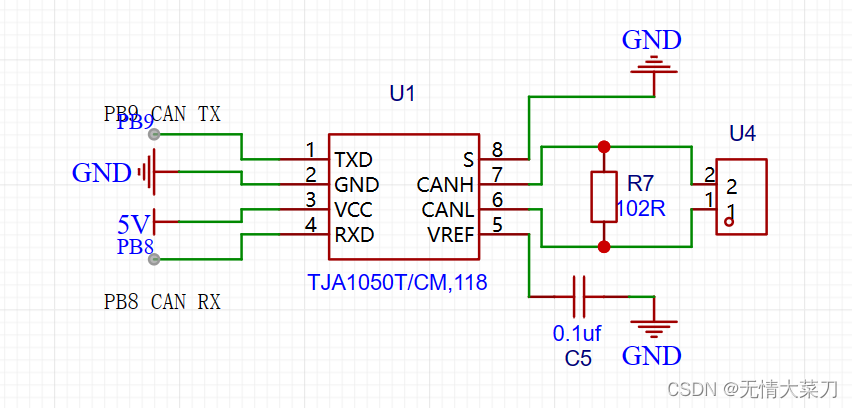
CAN收发器是外接器件,(例如:TJA1050)作用:把差分信号转换为MCU能能识别的TTL信号。

硬件电路

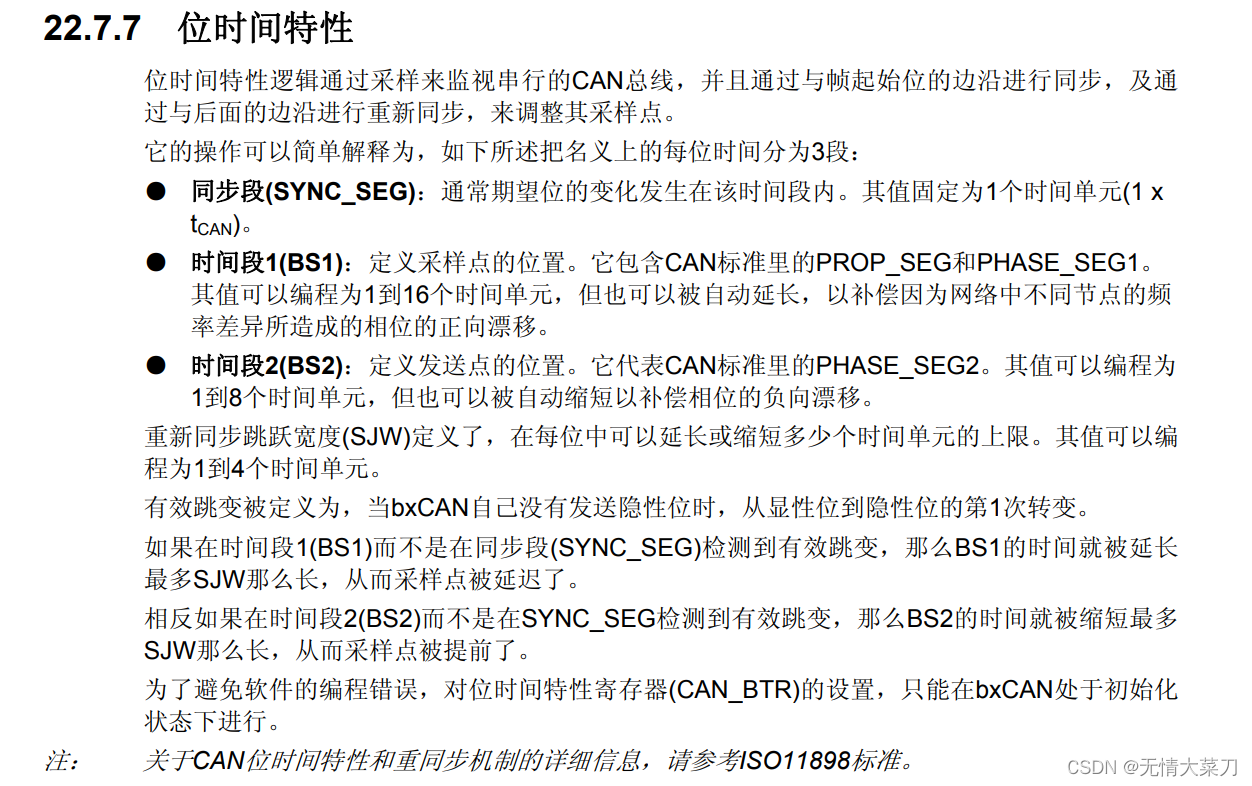
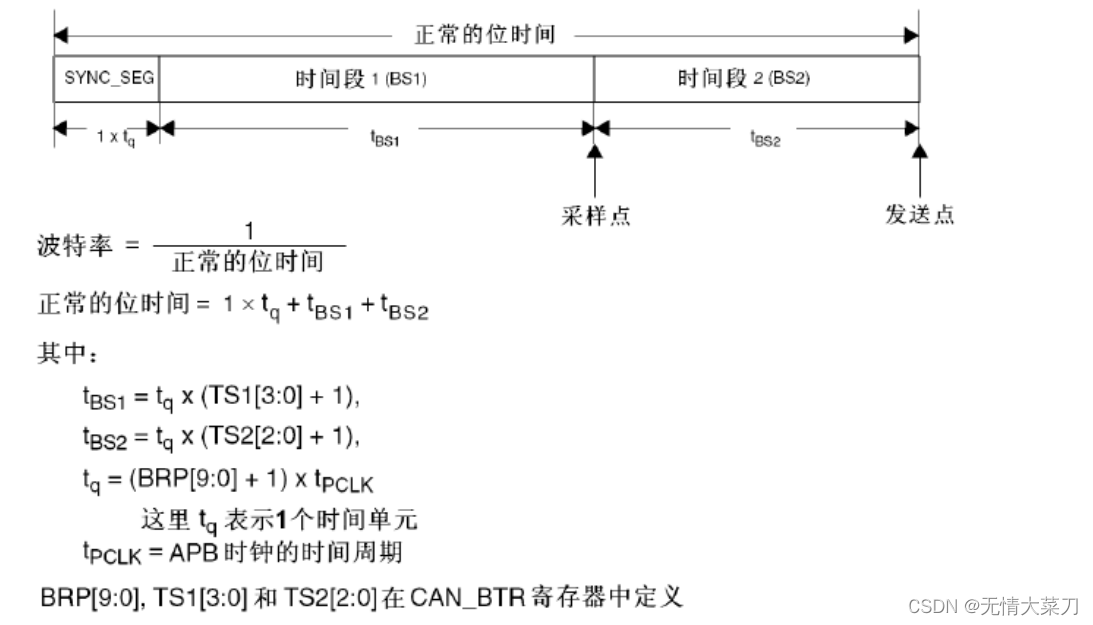
CAN波特率计数
一、 STM32 CubeMX设置
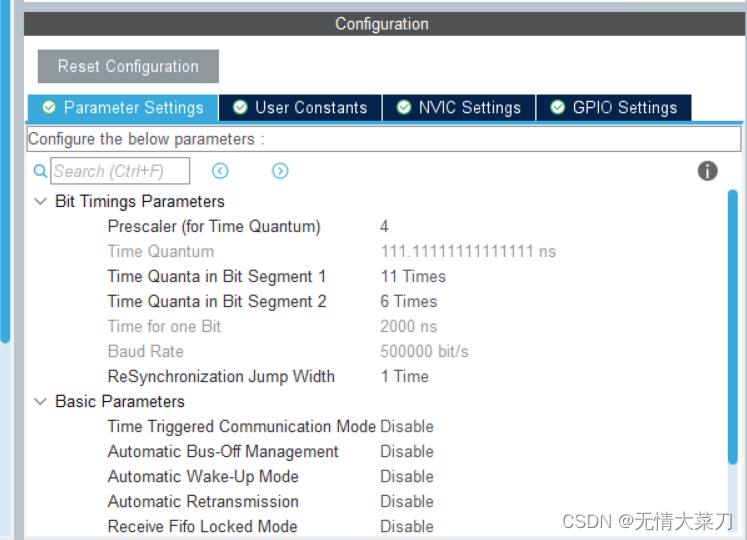
设置波特率
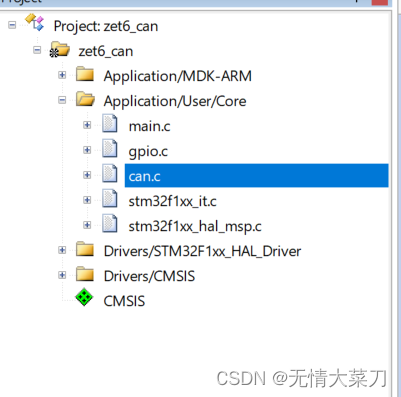
工程目录结构
添加CAN驱动代码
CAN_TxHeaderTypeDef TxHeader; //发送
CAN_RxHeaderTypeDef RXHeader;
uint8_t TXmessage[8] = {0x00,0x11,0x22,0x33,0x44,0x55,0x66,0x77};
uint8_t RXmessage[8];
uint32_t pTxMailbox = 0;
uint8_t CAN1_Send_Msg(uint8_t* msg,uint8_t len)
{
uint8_t i=0;
uint32_t TxMailbox;
uint8_t message[8];
TxHeader.StdId=0X12; //标准标识符
TxHeader.ExtId=0x12; //扩展标识符(29位)
TxHeader.IDE=CAN_ID_STD; //使用标准帧
TxHeader.RTR=CAN_RTR_DATA; //数据帧
TxHeader.DLC=len;
for(i=0;i<len;i++)
{
message[i]=msg[i];
}
if(HAL_CAN_AddTxMessage(&hcan, &TxHeader, message, &TxMailbox) != HAL_OK)//发送
{
return 1;
}
while(HAL_CAN_GetTxMailboxesFreeLevel(&hcan) != 3) {}
return 0;
}
void MX_CAN1_Init(void)
{
hcan.Instance = CAN1;
hcan.Init.Prescaler = 9;
hcan.Init.Mode = CAN_MODE_NORMAL;
hcan.Init.SyncJumpWidth = CAN_SJW_1TQ;
hcan.Init.TimeSeg1 = CAN_BS1_5TQ;
hcan.Init.TimeSeg2 = CAN_BS2_2TQ;
hcan.Init.TimeTriggeredMode = DISABLE;
hcan.Init.AutoBusOff = ENABLE;
hcan.Init.AutoWakeUp = ENABLE;
hcan.Init.AutoRetransmission = DISABLE;
hcan.Init.ReceiveFifoLocked = DISABLE;
hcan.Init.TransmitFifoPriority = DISABLE;
if (HAL_CAN_Init(&hcan) != HAL_OK)
{
Error_Handler();
}
CAN_FilterTypeDef sFilterConfig;
sFilterConfig.FilterActivation = ENABLE;//打开过滤器
sFilterConfig.FilterBank = 0;//过滤器0 这里可设0-13
sFilterConfig.FilterMode = CAN_FILTERMODE_IDMASK;//采用掩码模式
sFilterConfig.FilterScale = CAN_FILTERSCALE_32BIT;//采用32位掩码模式
sFilterConfig.FilterFIFOAssignment = CAN_FILTER_FIFO0;//采用FIFO0
sFilterConfig.FilterIdHigh = 0x0000; //设置过滤器ID高16位
sFilterConfig.FilterIdLow = 0x0000;//设置过滤器ID低16位
sFilterConfig.FilterMaskIdHigh = 0x0000;//设置过滤器掩码高16位
sFilterConfig.FilterMaskIdLow = 0x0000;//设置过滤器掩码低16位
if(HAL_CAN_ConfigFilter(&hcan,&sFilterConfig) != HAL_OK)//初始化过滤器
{
Error_Handler();
}
if(HAL_CAN_Start(&hcan) != HAL_OK)//打开can
{
Error_Handler();
}
if(HAL_CAN_ActivateNotification(&hcan,CAN_IT_RX_FIFO0_MSG_PENDING) != HAL_OK)//开启接受邮箱0挂起中断
{
Error_Handler();
}
}
void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan)//接受邮箱0挂起中断回调函数
{
if(hcan->Instance==CAN1)
{
HAL_CAN_GetRxMessage(hcan,CAN_FILTER_FIFO0,&RXHeader,RXmessage);//获取数据
}
}
主函数添加代码

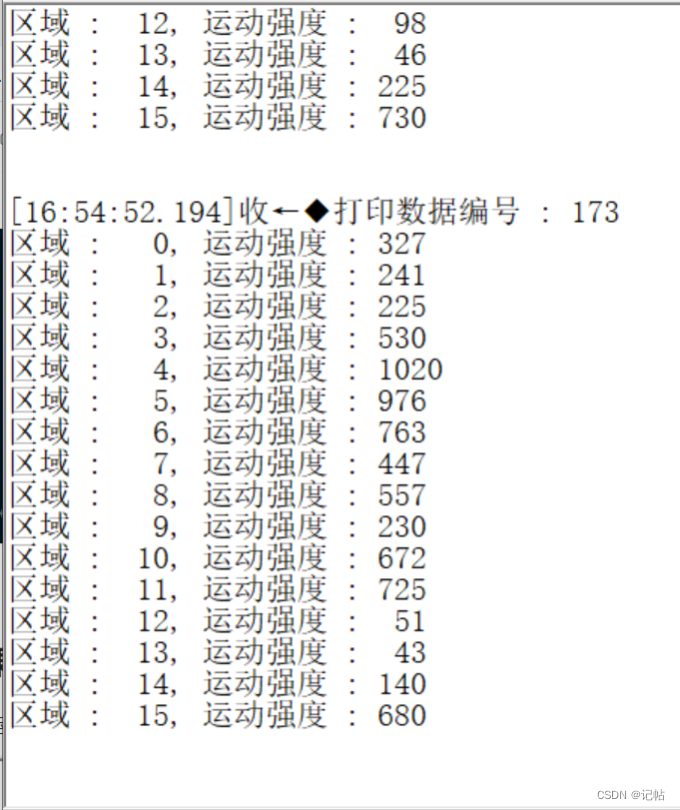
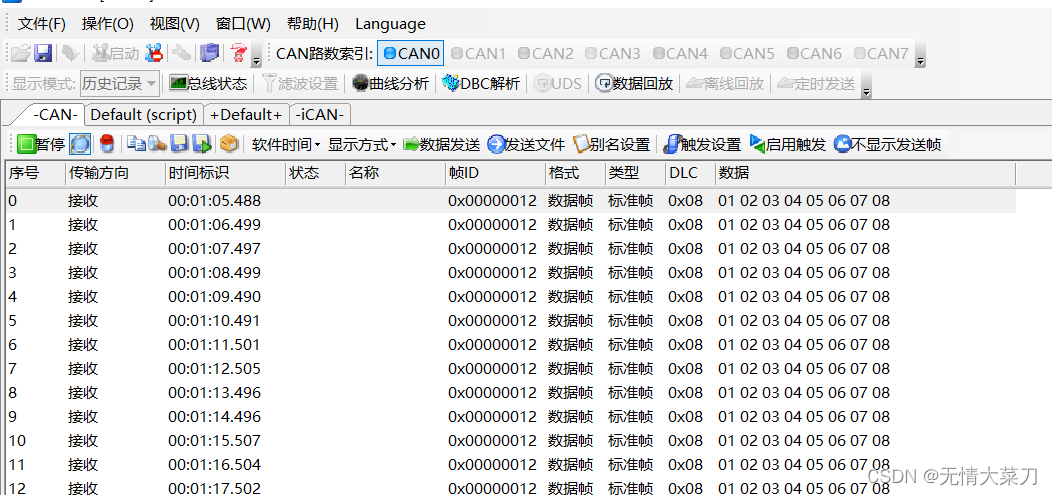
实验现象
总结
提示:这里对文章进行总结:
例如:以上就是今天要讲的内容,本文仅仅简单介绍了stm32 CAN的使用,而stm32 CAN提供了大量能使我们快速便捷地处理数据的函数和方法。



![[OpenJDK:环境变量配置]:填充Profile并修改默认配置](https://img-blog.csdnimg.cn/4434177eac0d47449b9d78065899728b.png)