位姿中姿态的表示形式有很多种,比如:旋转矩阵、四元数、欧拉角、旋转向量等等。这里基于Eigen实现四种数学形式的相互转换功能。本文利用Eigen实现上述四种形式的相互转换。我这里给出一个SE3(4*4)(先平移、再旋转)的构建方法:
Eigen::Isometry3f T1 = Eigen::Isometry3f::Identity(); // 这一句千万别掉
// <1> 初始化R
Eigen::Matrix3f R;
// 按照 ZYX 顺序旋转
R = Eigen::AngleAxisf(3.14159 / 4, Eigen::Vector3f::UnitX()) *
Eigen::AngleAxisf(0, Eigen::Vector3f::UnitY()) *
Eigen::AngleAxisf(0, Eigen::Vector3f::UnitZ());
// <2> 初始化t
Eigen::Vector3f t(0.0, 0.0, 4.0);
// <3> 构建T = (R|t)
T1.rotate(R);
T1.pretranslate(t); // 这一句别搞错
//T1.translate(t);
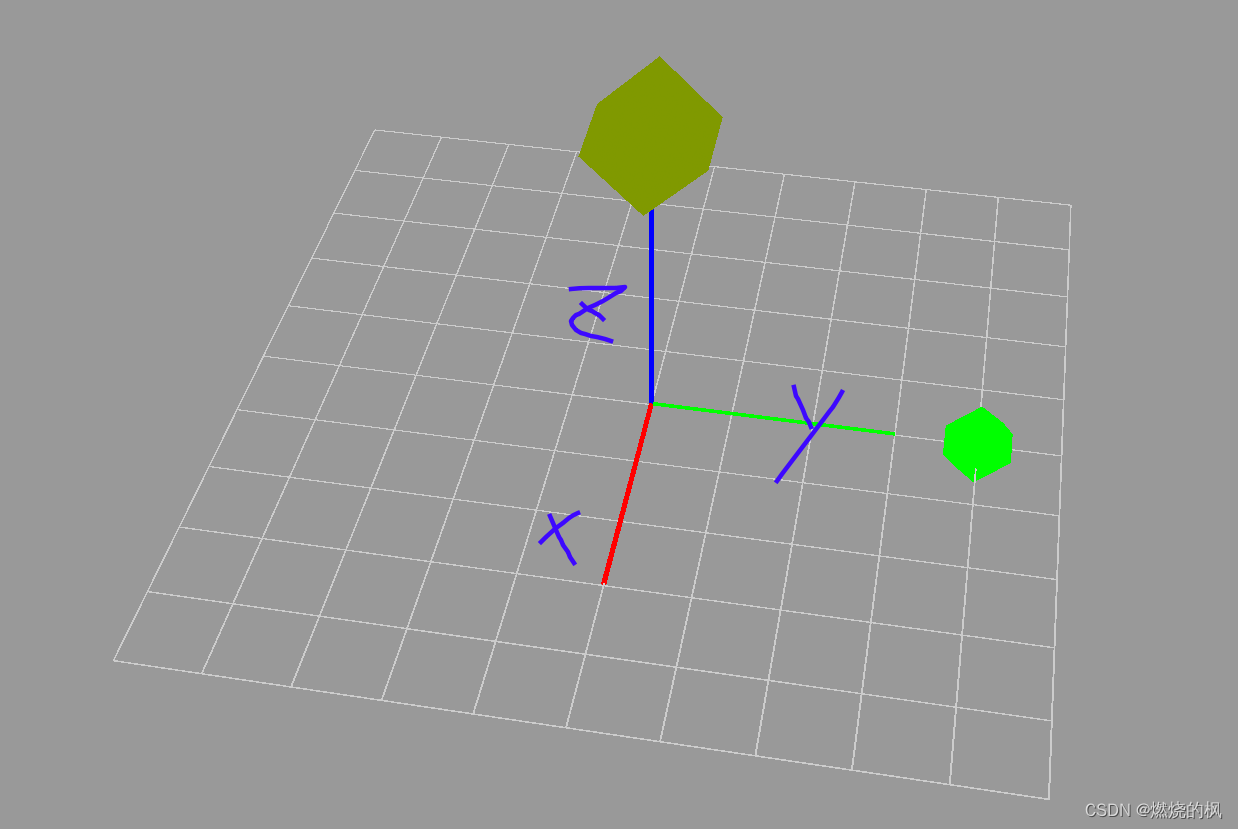
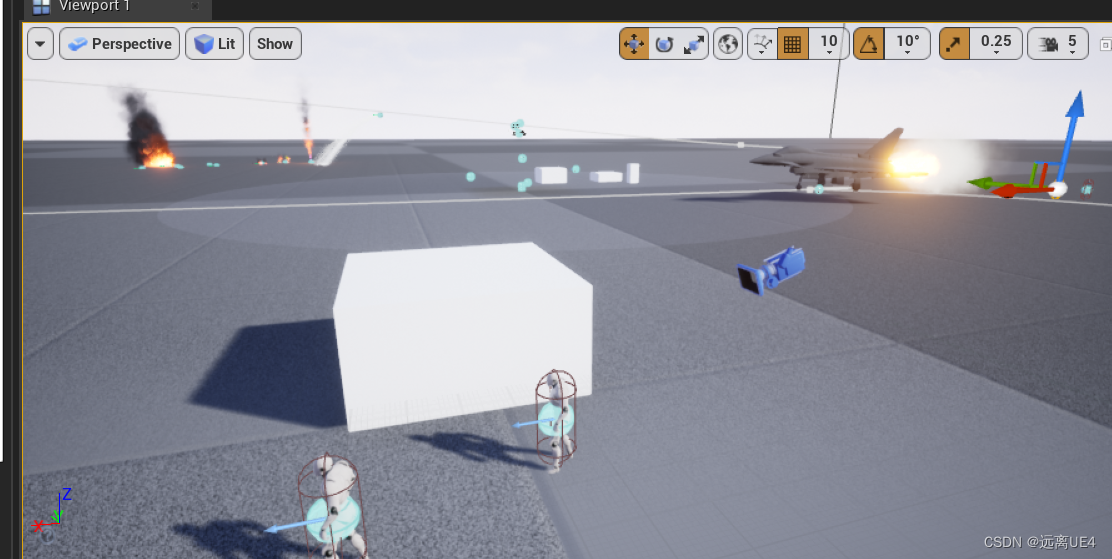
std::cout << "T1 = " <<T1.matrix() <<std::endl;打印结果:
T1 = 1 0 0 0
0 0.707107 -0.707106 0
0 0.707106 0.707107 4
0 0 0 1下面的黄色立方体,相对坐标系位置为:(0 0 4),绕x轴旋转pi /4,得到绿色立方体
以下是在本地word中笔记的截图:
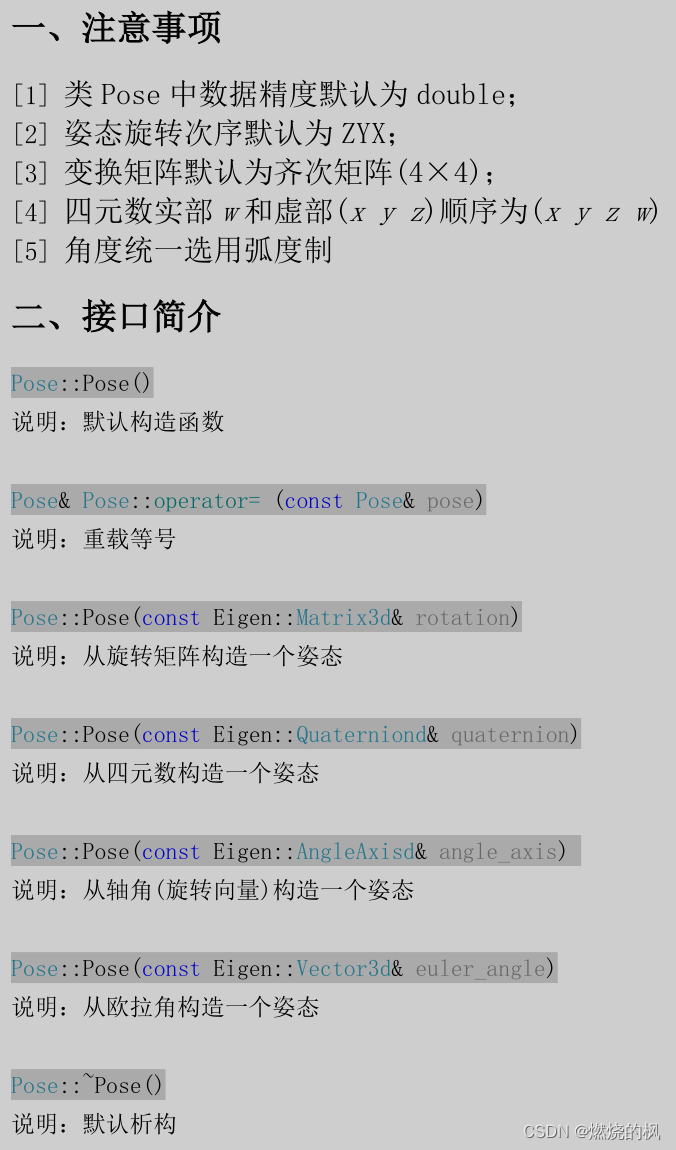
Pose.h(类Pose声明)
#pragma once
#ifndef POSE_H
#define POSE_H
#include<Eigen/Core>
#include<Eigen/Geometry>
// namespace Geometry
class Pose
{
public:
Pose();
Pose& operator= (const Pose& pose);
// construct from rotation
Pose(const Eigen::Matrix3d& rotation);
// construct from quaternion
Pose(const Eigen::Quaterniond& quaternion);
// construct from angle axisd
Pose(const Eigen::AngleAxisd& angle_axis);
// construct from euler angle
Pose(const Eigen::Vector3d& euler_angle);
~Pose();
// return rotation
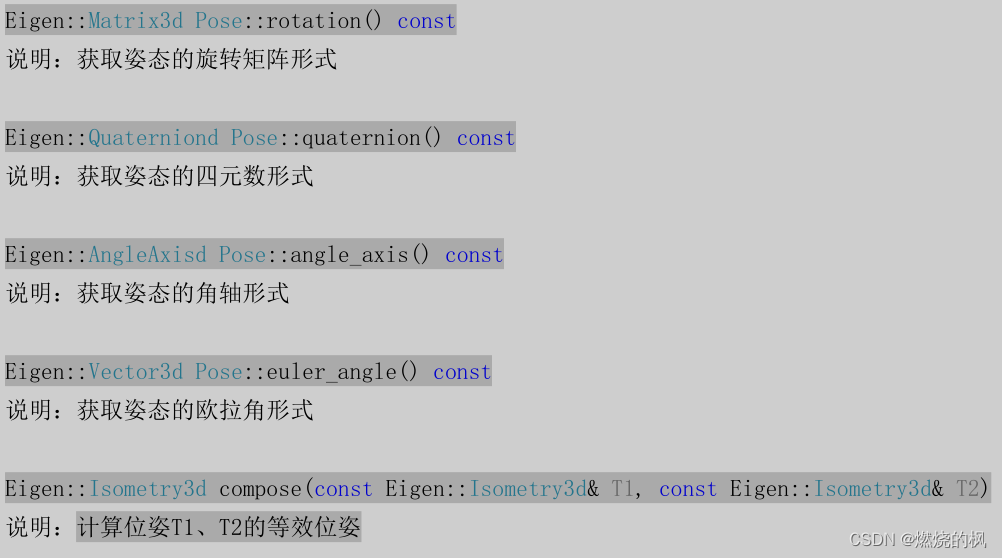
Eigen::Matrix3d rotation() const;
// return quaterniond
Eigen::Quaterniond quaternion() const;
// return angle axisd
Eigen::AngleAxisd angle_axis() const;
// return euler angle
Eigen::Vector3d euler_angle() const;
private:
Eigen::Matrix3d rotation_; // 旋转矩阵
Eigen::Quaterniond quaternion_; // 四元数
Eigen::AngleAxisd angle_axis_; // 角轴
Eigen::Vector3d euler_angle_; // 欧拉角 roll(X轴) pitch(Y轴) yaw(Z轴)
};
// 姿态组合
Eigen::Isometry3d compose(const Eigen::Isometry3d& T1, const Eigen::Isometry3d& T2);
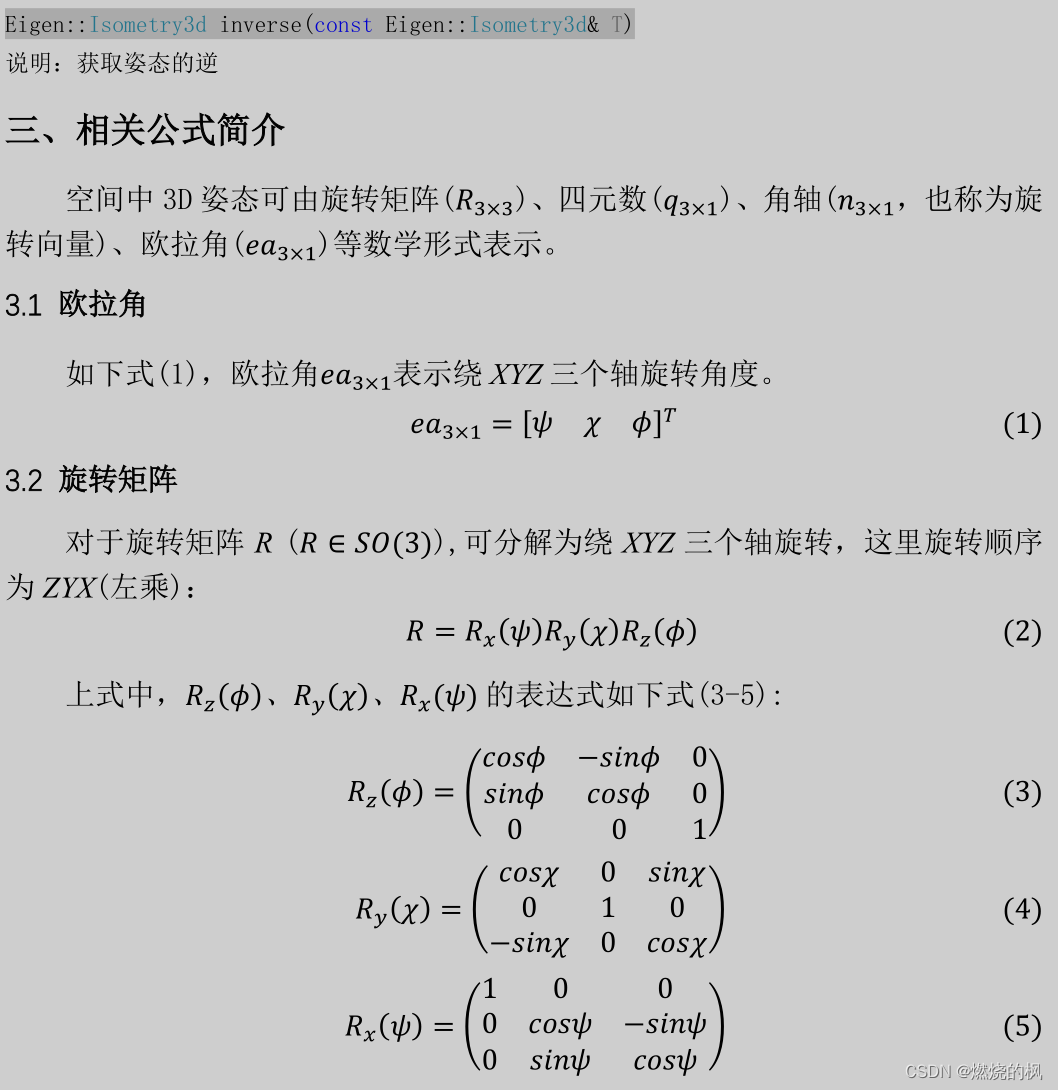
// 求逆
Eigen::Isometry3d inverse(const Eigen::Isometry3d& T);
#endif // !POSE_HPose.cpp(类Pose的实现)
#include "Pose.h"
Pose::Pose()
{}
Pose& Pose::operator= (const Pose& pose)
{
this->rotation_ = pose.rotation();
this->quaternion_ = pose.quaternion();
this->angle_axis_ = pose.angle_axis();
this->euler_angle_ = pose.euler_angle();
return *this;
}
//
Pose::Pose(const Eigen::Matrix3d& rotation) :
rotation_(rotation),
quaternion_(Eigen::Quaterniond(rotation_)),
angle_axis_(Eigen::AngleAxisd(rotation_)),
euler_angle_(rotation_.eulerAngles(0, 1, 2))
{}
Pose::Pose(const Eigen::Quaterniond& quaternion)
{
quaternion.normalized();
this->rotation_ = quaternion.toRotationMatrix();
this->quaternion_ = Eigen::Quaterniond(rotation_);
this->angle_axis_ = Eigen::AngleAxisd(rotation_);
this->euler_angle_ = rotation_.eulerAngles(0, 1, 2);
}
Pose::Pose(const Eigen::AngleAxisd& angle_axis) :
rotation_(angle_axis),
quaternion_(Eigen::Quaterniond(rotation_)),
angle_axis_(Eigen::AngleAxisd(rotation_)),
euler_angle_(rotation_.eulerAngles(0, 1, 2))
{}
Pose::Pose(const Eigen::Vector3d& euler_angle) :
rotation_(Eigen::AngleAxisd(euler_angle.x(), Eigen::Vector3d::UnitX()) * // note: ZYX
Eigen::AngleAxisd(euler_angle.y(), Eigen::Vector3d::UnitY()) *
Eigen::AngleAxisd(euler_angle.z(), Eigen::Vector3d::UnitZ())),
quaternion_(Eigen::Quaterniond(rotation_)),
angle_axis_(Eigen::AngleAxisd(rotation_)),
euler_angle_(rotation_.eulerAngles(0, 1, 2))
{}
Pose::~Pose()
{}
Eigen::Matrix3d Pose::rotation() const
{
return this->rotation_;
}
Eigen::Quaterniond Pose::quaternion() const
{
return this->quaternion_;
}
Eigen::AngleAxisd Pose::angle_axis() const
{
return this->angle_axis_;
}
Eigen::Vector3d Pose::euler_angle() const
{
return this->euler_angle_;
}
Eigen::Isometry3d compose(const Eigen::Isometry3d& T1, const Eigen::Isometry3d& T2)
{
return T1 * T2;
}
Eigen::Isometry3d inverse(const Eigen::Isometry3d& T)
{
return T.inverse();
}test_pose.cpp
#include<iostream>
using namespace std;
#include"Pose.h"
const double M_PI = 3.1415926535;
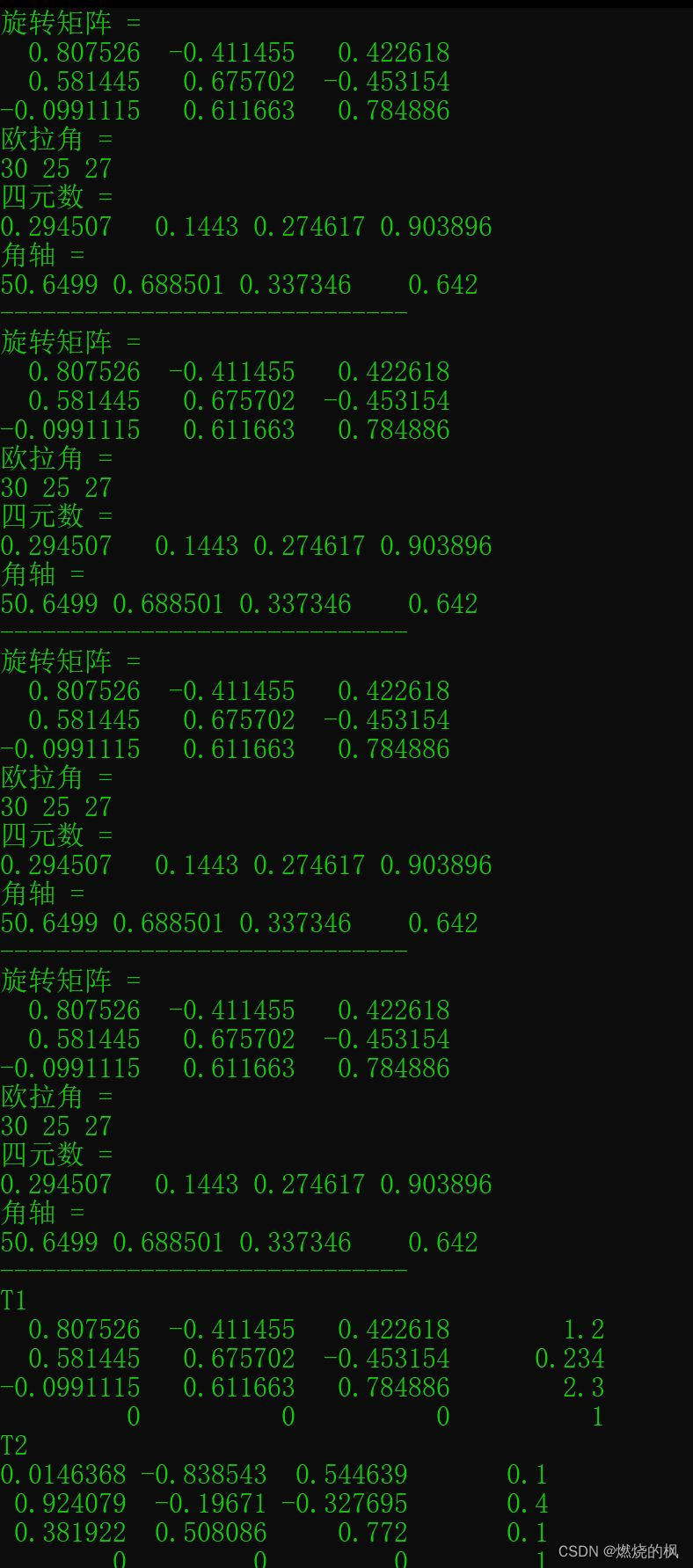
// 对于同一个姿态,从不同的数学形式(旋转矩阵、四元数、欧拉角、角轴)构造类Pose
// 依次得到 pose1 pose2 pose3 pose4
void testClassPose(const Eigen::Matrix3d& R1)
{
Pose pose1(R1);
cout << "旋转矩阵 = " << endl; cout << pose1.rotation() << endl;
cout << "欧拉角 = " << endl; cout << pose1.euler_angle().transpose()*(180 / M_PI) << endl;
cout << "四元数 = " << endl; cout << pose1.quaternion().coeffs().transpose() << endl;
cout << "角轴 = " << endl;
cout << pose1.angle_axis().angle()* (180 / M_PI) <<" " << pose1.angle_axis().axis().transpose() <<endl;
cout << "-----------------------------" << endl;
Pose pose2(pose1.euler_angle());
cout << "旋转矩阵 = " << endl; cout << pose2.rotation() << endl;
cout << "欧拉角 = " << endl; cout << pose2.euler_angle().transpose()*(180 / M_PI) << endl;
cout << "四元数 = " << endl; cout << pose2.quaternion().coeffs().transpose() << endl;
cout << "角轴 = " << endl;
cout << pose2.angle_axis().angle()* (180 / M_PI) << " " << pose2.angle_axis().axis().transpose() << endl;
cout << "-----------------------------" << endl;
Pose pose3(pose1.angle_axis());
cout << "旋转矩阵 = " << endl; cout << pose3.rotation() << endl;
cout << "欧拉角 = " << endl; cout << pose3.euler_angle().transpose()*(180 / M_PI) << endl;
cout << "四元数 = " << endl; cout << pose3.quaternion().coeffs().transpose() << endl;
cout << "角轴 = " << endl;
cout << pose3.angle_axis().angle()* (180 / M_PI) << " " << pose3.angle_axis().axis().transpose() << endl;
cout << "-----------------------------" << endl;
Pose pose4 = pose3;
cout << "旋转矩阵 = " << endl; cout << pose4.rotation() << endl;
cout << "欧拉角 = " << endl; cout << pose4.euler_angle().transpose()*(180 / M_PI) << endl;
cout << "四元数 = " << endl; cout << pose4.quaternion().coeffs().transpose() << endl;
cout << "角轴 = " << endl;
cout << pose4.angle_axis().angle()* (180 / M_PI) << " " << pose4.angle_axis().axis().transpose() << endl;
cout << "-----------------------------" << endl;
}
// 测试求逆、compose等
void testTheOthers(Eigen::Matrix3d R1, Eigen::Vector3d t1,
Eigen::Matrix3d R2, Eigen::Vector3d t2)
{
// 初始化T1
Eigen::Isometry3d T1 = Eigen::Isometry3d::Identity();
T1.prerotate(R1); T1.pretranslate(t1);
cout << "T1" << endl; cout << T1.matrix() << endl;
// 初始化T2
Eigen::Isometry3d T2 = Eigen::Isometry3d::Identity();
T2.prerotate(R2); T2.pretranslate(t2);
cout << "T2" << endl; cout << T2.matrix() << endl;
// 求逆
Eigen::Isometry3d T1_inverse = inverse(T1);
cout << "T1_inverse = " << endl; cout << T1_inverse.matrix() << endl;
// compose
Eigen::Isometry3d T12 = compose(T1, T2);
cout << "T12 = " << endl; cout << T12.matrix() << endl;
/*cout << "Rotation = " << endl;
cout << T1.rotation() * T2.rotation() << endl;
cout << "Translation = " << endl;
cout << T1.rotation() * T2.translation() + T1.translation() << endl;*/
}
int main()
{
Eigen::Matrix3d R1; //R1
R1 = Eigen::AngleAxisd((30.0 / 180) * M_PI, Eigen::Vector3d::UnitX())*
Eigen::AngleAxisd((25.0 / 180) * M_PI, Eigen::Vector3d::UnitY())*
Eigen::AngleAxisd((27.0 / 180) * M_PI, Eigen::Vector3d::UnitZ());
Eigen::Vector3d t1(1.2, 0.234, 2.3);//t1
Eigen::Matrix3d R2; //R2
R2 = Eigen::AngleAxisd((23.0 / 180) * M_PI, Eigen::Vector3d::UnitX())*
Eigen::AngleAxisd((33.0 / 180) * M_PI, Eigen::Vector3d::UnitY())*
Eigen::AngleAxisd((89.0 / 180) * M_PI, Eigen::Vector3d::UnitZ());
Eigen::Vector3d t2(0.1, 0.4, 0.1); //t2
// <1> test Class Pose
testClassPose(R1);
// <2> test halcon's api
testTheOthers(R1, t1, R2, t2);
return 1;
}可以看到,同一个姿态,不同的表达形式,他们之间相互转换之后结果数值一致。
写在最后,一个T为4×4的变换矩阵,如果旋转分量是欧式正交群,那个这个T为:欧式变换;否者为:仿射变换。如果一个旋转矩阵,不是SO3,那么可以将其转为四元数,接着归一化,再转为旋转矩阵,这样结果就属于SO3。同理,如果一个四元数,最好对齐进行归一化处理,再转为其他形式。例如:构造函数Pose(const Eigen::Quaterniond& quaternion); 其实现中比其他构造函数多了归一化这一步骤;即:quaternion.normalized();
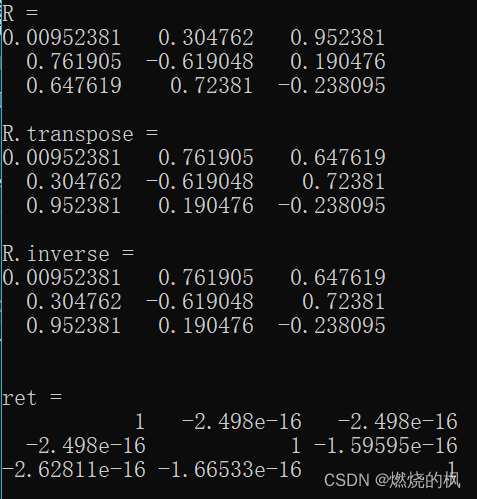
请看测试案例test3(),我们在第4或第5行进行四元数归一化,那么24行打印出来的矩阵就是单位阵。(不归一化,则不是单位阵)
void test3()
{
Eigen::Quaterniond q = { 0.1,0.35,0.2,0.3 };
//q.normalize();
Eigen::Matrix3d R = q.normalized().toRotationMatrix();
cout << "R = " << endl;
cout << R << endl;
cout << endl;
Eigen::Matrix3d R_transpose = R.transpose();
cout << "R.transpose = " << endl;
cout << R_transpose << endl;
cout << endl;
Eigen::Matrix3d R_inverse = R.inverse();
cout << "R.inverse = " << endl;
cout << R_inverse << endl << endl;
cout << endl;
Eigen::Matrix3d ret = R * R.transpose();
cout << "ret = " << endl;
cout << ret << endl << endl;
cout << endl;
}运行结果:
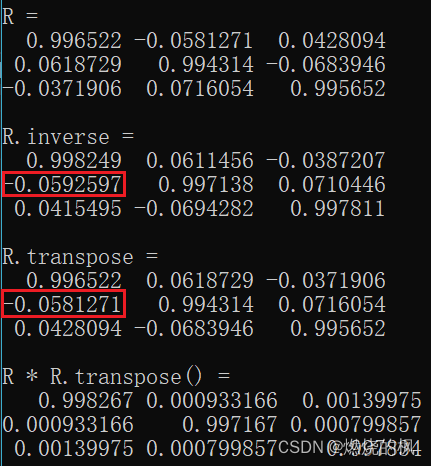
现在,如果给定一个旋转矩阵(如果你是随机测试,请你参考博客开始部分公式,每个元素是有取值范围的,给出的数字不要太离谱);如下测试案例test4。第8行在底层有四元数归一化操作,所以你看下面效果图,R * R.tranpose() 近似为一个单位矩阵。
void test4()
{
Eigen::Matrix3d R;
R << 0.74, 0.08, 0.25,
0.2, 0.575, 0.05,
0.17, 0.19, 0.675;
Pose p1(R);
Pose p2(p1.quaternion()); // Pose中,针对从四元数构造,默认有归一化功能
R = p2.rotation();
cout << "R = " << endl;
cout << R << endl;
cout << endl;
cout << "R.inverse = " << endl;
cout << R.inverse() << endl;
cout << endl;
cout << "R.transpose = " << endl;
cout << R.transpose() << endl;
cout << endl;
cout << "R * R.transpose() = " << endl;
cout << R * R.transpose() << endl;
cout << endl;
}运行结果:
其中,R表示旋转,用旋转向量来描述(欧拉角有周期性和方向锁的问题,四元数有单位向量的约束,旋转矩阵冗余度太高且有各个基需要是单位正交的约束);t表示平移,用平移向量来描述。R和t均采用无约束的向量进行描述,于是也均可以通过网络的学习来得到。因为R和t共有六个自由度,因此姿态估计又称为6D姿态估计。
注:旋转向量的方向代表旋转轴,模长代表旋转角的大小,旋转方向为逆时针。
Eigen对于 translate 与 pretranslate的区别?(先平移、再旋转和 先旋转、再平移,有何区别?)可以看看这个:https://zhuanlan.zhihu.com/p/165020637


![2023年中国分布式光纤传感产量、需求量及行业市场规模分析[图]](https://img-blog.csdnimg.cn/img_convert/6b90839b616e6cecae40b5efe44b69c5.png)