文章目录
- 前言
- 一、特征图可视化
- 1.1 V7.0的小bug
- 二、可视化指定层
- 三、合并通道可视化
- 总结
前言
对于特征图可视化感兴趣可以参考我的另一篇记录:六行代码实现:特征图提取与特征图可视化,可以实现分类网络的特征图可视化
最近忙论文,想在yolov5上面做一些改进,看源码看了一段时间,动手改改代码做一些改进,所以做个一系列改进的记录。
一、特征图可视化
yolov5最近的版本提供了特征图可视化的功能,在使用detect.py进行推理时,在命令行参数传入--visualize即可。
python detect.py --weights best.pt --conf 0.5 --source ../dog.png --visualize
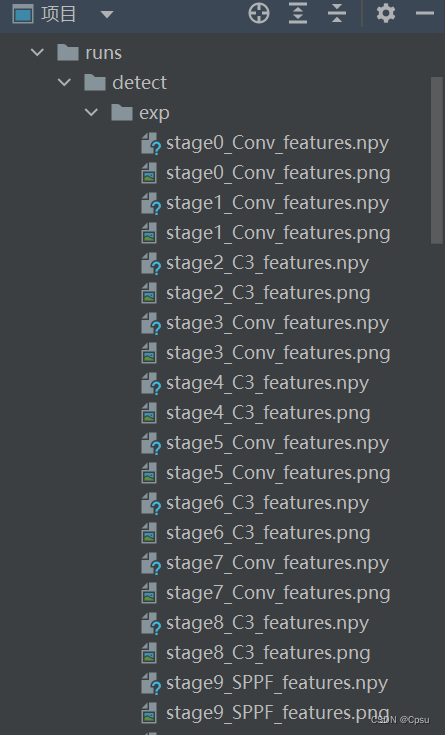
传入visualize参数后会可视化所有层的特征图,文件默认保存在runs/detect/exp 文件夹下
1.1 V7.0的小bug
我给官方提了个issue,回复应该是源码出错了,不应该把
visualize赋值给save_dir
针对这个可视化的代码其实有个疑问:可视化的代码是在models/yolo.py文件下调用的,下面是调用特征图可视化的代码,在类BaseModel中定义了模型的前向传播过程,这里的visualize参数是一个bool类型,用于判断是否要可视化特征图,但是在可视化函数feature_visualization(x, m.type, m.i, save_dir=visualize)却把visualize传给了save_dir,save_dir应该是特征图的保存路径而不是bool,所以这里其实应该做一个更改否则会报错。
这里可以选择不传入save_dir,特征图会默认保存到runs/detect/exp 路径下,否则可以传入指定路径,比如:
save_dir=Path('../feature_map')
......
# models/yolo.py文件
class BaseModel(nn.Module):
# YOLOv5 base model
def forward(self, x, profile=False, visualize=False):
return self._forward_once(x, profile, visualize) # single-scale inference, train
def _forward_once(self, x, profile=False, visualize=False):
y, dt = [], [] # outputs
for m in self.model:
if m.f != -1: # if not from previous layer
x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
if profile:
self._profile_one_layer(m, x, dt)
x = m(x) # run
y.append(x if m.i in self.save else None) # save output
"""
这里的visualize是一个bool类型,但是却传给了save_dir,save_dir应该是特征图的保存路径
所以这里其实应该做一个更改否则会报错
"""
if visualize:
# 更改前
# feature_visualization(x, m.type, m.i, save_dir=visualize)
#更改后
feature_visualization(x, m.type, m.i)
return x
......
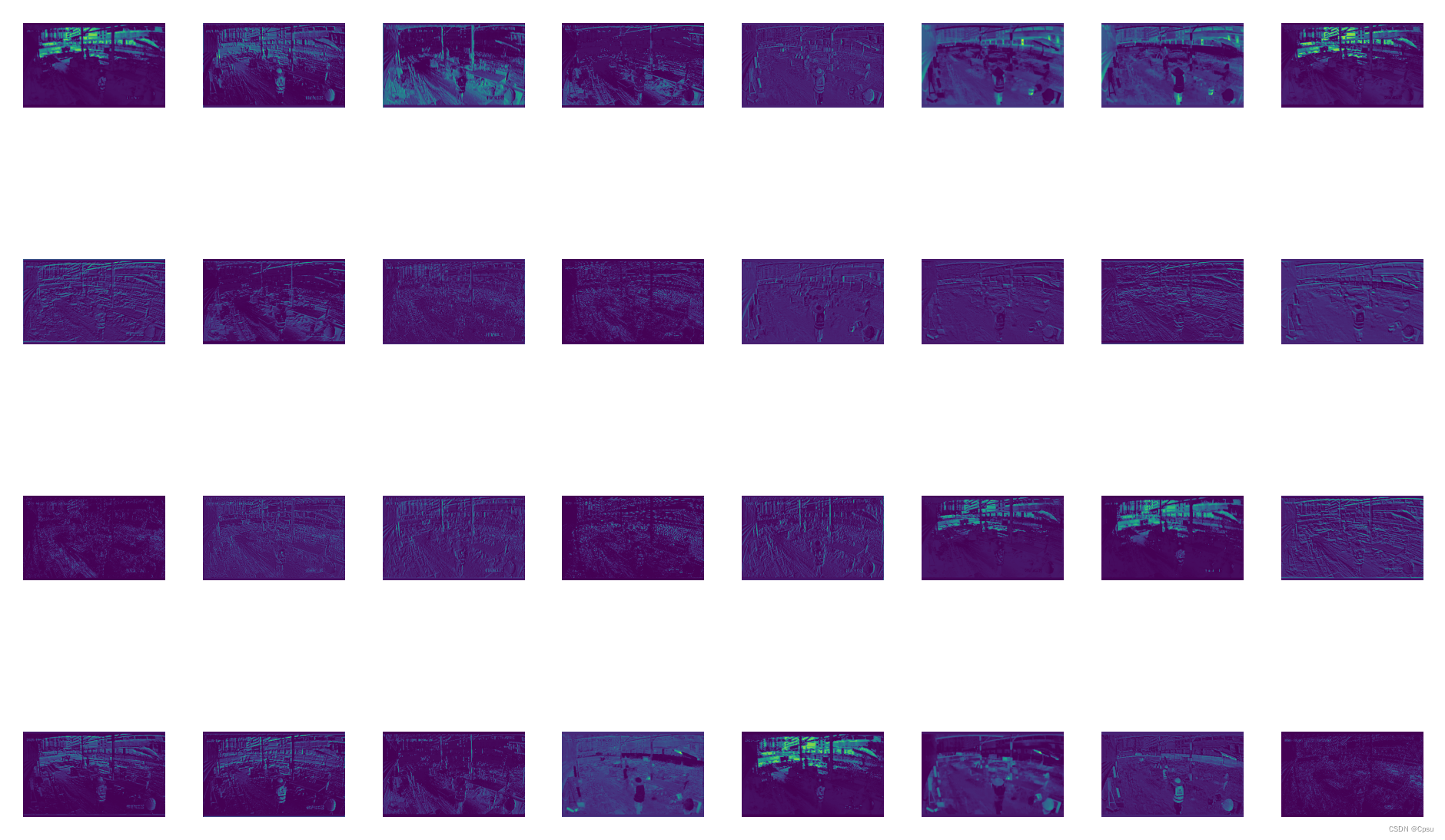
yolov5 这里是针对单个通道进行可视化(默认最多可视化32个通道),参考GitHub的相关issue,可以自行修改feature_visualization的各个参数
# utils/plots.py
def feature_visualization(x, module_type, stage, n=32, save_dir=Path('runs/detect/exp')):
"""
x: 输入即可视化的Tensor
module_type: Module type 用于命名区分各层特征图
stage: Module stage within model 用于命名区分各层特征图
n: Maximum number of feature maps to plot 可视化的通道个数(通道数太多不可能全部可视化)
save_dir: Directory to save results 特征图的保存路径
"""
if 'Detect' not in module_type:
batch, channels, height, width = x.shape # batch, channels, height, width
if height > 1 and width > 1:
# 文件的命名格式 层名+层的索引
f = save_dir / f"stage{stage}_{module_type.split('.')[-1]}_features.png" # filename
# 按通道数拆分Tensor
# 进行逐通道的可视化
blocks = torch.chunk(x[0].cpu(), channels, dim=0) # select batch index 0, block by channels
n = min(n, channels) # number of plots
fig, ax = plt.subplots(math.ceil(n / 8), 8, tight_layout=True) # 8 rows x n/8 cols
ax = ax.ravel()
plt.subplots_adjust(wspace=0.05, hspace=0.05)
for i in range(n):
ax[i].imshow(blocks[i].squeeze()) # cmap='gray'
ax[i].axis('off')
LOGGER.info(f'Saving {f}... ({n}/{channels})')
plt.savefig(f, dpi=300, bbox_inches='tight')
plt.close()
np.save(str(f.with_suffix('.npy')), x[0].cpu().numpy()) # npy save
二、可视化指定层
如果不想可视化所有的特征层,比如只需要可视化第一个卷积层的输出那么只需要修改判断条件即可,
将 if visualize: 修改为 if m.type == 'models.common.Conv' and m.i == 0:
# models/yolo.py文件
class BaseModel(nn.Module):
# YOLOv5 base model
def forward(self, x, profile=False, visualize=False):
return self._forward_once(x, profile, visualize) # single-scale inference, train
def _forward_once(self, x, profile=False, visualize=False):
y, dt = [], [] # outputs
for m in self.model:
if m.f != -1: # if not from previous layer
x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
if profile:
self._profile_one_layer(m, x, dt)
x = m(x) # run
y.append(x if m.i in self.save else None) # save output
"""
可视化指定层只需要更改一下判断条件即可
将 if visualize:
修改为 if m.type == 'models.common.Conv' and m.i == 0:
"""
# 修改前
# if visualize:
# 修改后
if m.type == 'models.common.Conv' and m.i == 0:
feature_visualization(x, m.type, m.i)
return x
......
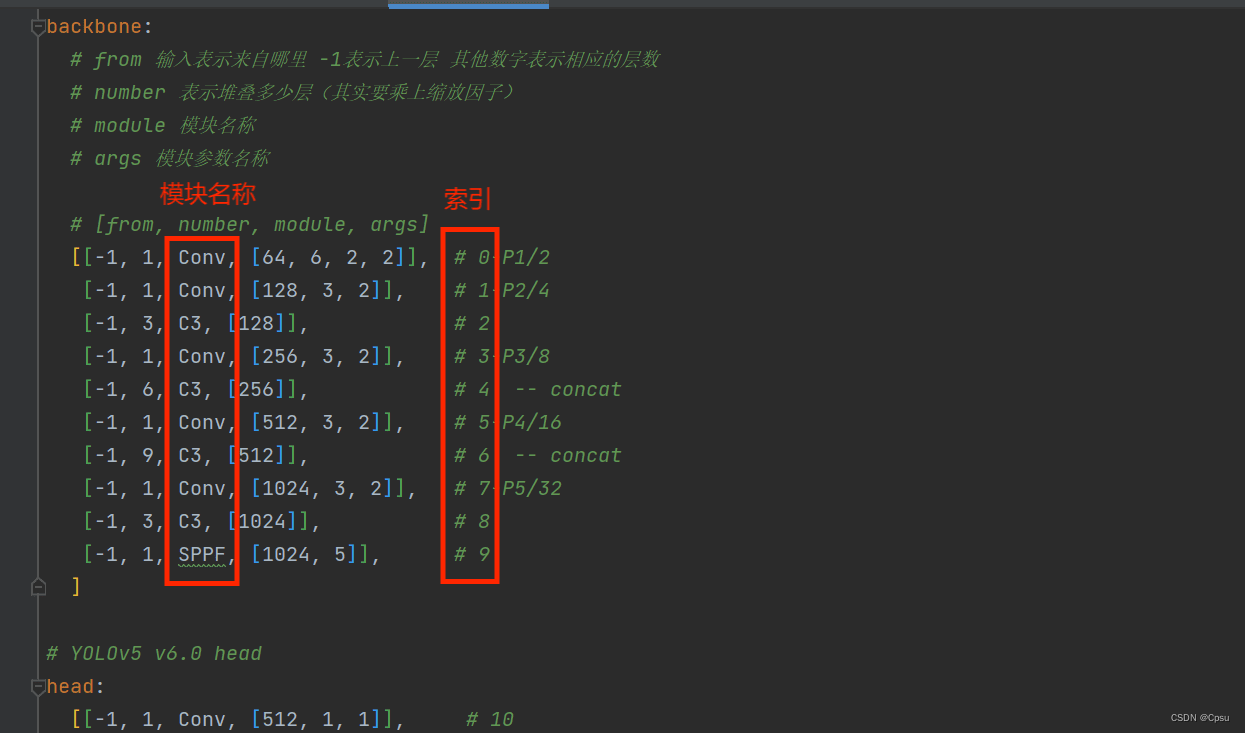
m.type 表示模块名称,m.i表示层的索引(即第几层),因为有重名的层需要索引加以区分
m.type的命名以 models.common. + 模块名,比如可视化SPPF就是 models.common.SPPF
m.i 即每个层对应得索引,SPPF对应得索引是9
三、合并通道可视化
如果不想分通道可视化,可以直接可视化整个Tensor。把下面得函数定义加入到utils/plots.py文件下
def feature_visualization_all(x, module_type, stage, save_dir=Path('runs/detect/exp')):
"""
x: Features to be visualized
module_type: Module type
stage: Module stage within model
n: Maximum number of feature maps to plot
save_dir: Directory to save results
"""
if 'Detect' not in module_type:
batch, channels, height, width = x.shape # batch, channels, height, width
if height > 1 and width > 1:
f = save_dir / f"stage{stage}_{module_type.split('.')[-1]}_features.png" # filename
img = x[0].cpu().transpose(0, 1).sum(1).detach().numpy()
plt.imsave(f, img)
LOGGER.info(f'Saving {f}...')
随后在models/yolo.py文件下导入并调用
from models.common import * # noqa
from models.experimental import * # noqa
from utils.autoanchor import check_anchor_order
from utils.general import LOGGER, check_version, check_yaml, make_divisible, print_args
# 导入feature_visualization_all
from utils.plots import feature_visualization, feature_visualization_all
from utils.torch_utils import (fuse_conv_and_bn, initialize_weights, model_info, profile, scale_img, select_device, time_sync)
......
class BaseModel(nn.Module):
# YOLOv5 base model
def forward(self, x, profile=False, visualize=False):
return self._forward_once(x, profile, visualize) # single-scale inference, train
def _forward_once(self, x, profile=False, visualize=False):
y, dt = [], [] # outputs
for m in self.model:
if m.f != -1: # if not from previous layer
x = y[m.f] if isinstance(m.f, int) else [x if j == -1 else y[j] for j in m.f] # from earlier layers
if profile:
self._profile_one_layer(m, x, dt)
x = m(x) # run
y.append(x if m.i in self.save else None) # save output
# 修改后
if m.type == 'models.common.Conv' and m.i == 0:
feature_visualization_all(x, m.type, m.i)
return x
......
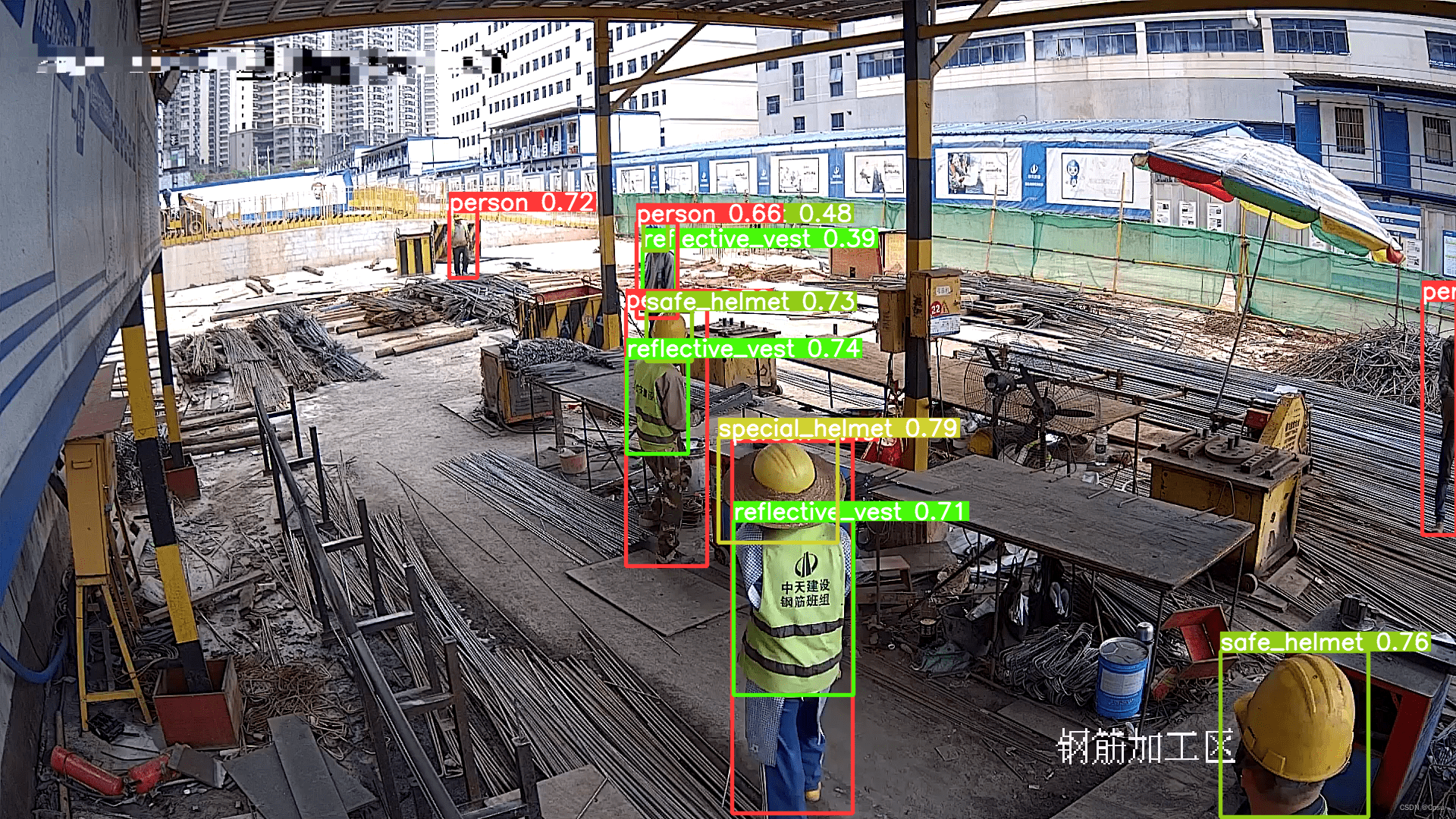
原图及检测效果:
合并通道特征图可视化:

总结
对于特征图可视化感兴趣可以参考我的另一篇记录:六行代码实现:特征图提取与特征图可视化,可以实现分类网络得特征图可视化





![【Vivado HLS Bug】Ubuntu环境下Vivado HLS导出IP报错:HLS ERROR: [IMPL 213-28]](https://img-blog.csdnimg.cn/e95713a129124e05af76f60e3f759e9a.png)