1. 小车测速的原理(281.126)
测速模块

- 用途:
- 广泛用于电机转速检测,脉冲计数,位置限位等。
- 逻辑:
- 有遮挡,输出高电平;无遮挡,输出低电平
- 接线
- VCC 接电源正极 3.3 - 5V
- GND 接电源负极
- DO TTL开关信号输出
- AO 此模块不起作用
测试原理和单位换算
- 轮子走一圈经过一个周长,C = 2 x 3.14 x 半径 = 3.14 x 直径(6.5cm)
- 对应的码盘也转了一圈。码盘有20个格子,每经过一个格子,会遮挡(高电平)和不遮挡(低电平)
- 那么一个脉冲就是走了 3.14 x 6.5 cm /20 = 1.0205cm
- 定时器可以设计成一秒,统计一秒内的脉冲数,一个脉冲就是 1cm
- 假设一秒有 80 脉冲,那么就是 80cm/s
2. 小车测速代码实现(282.127)
- 代码(20./11. 测速数据通过串口发送到上位机01)
#include "motor.h"
#include "delay.h"
#include "uart.h"
#include "reg52.h"
#include "timer.h"
sbit speedIO = P3^2; //外部中断0
unsigned int speedCnt = 0; //统计格子,脉冲次数
extern unsigned int speed; //速度
extern char signal; //主程序1s后可以发速度数据的信号
void Ex0Init(){
EX0 = 1;//允许中断
//EA = 1;在串口初始化函数中已经打开了总中断
IT0 = 1;//外部中断的下降沿触发
}
void main(){
Timer0Init();
UartInit();//串口相关初始化
Ex0Init(); //外部中断初始化
while(1){
if(signal){//定时器1s到点,把signal置一,主程序发送速度
SendString("speed:");
SendByte(speed);//速度发出去//用sendByte不合理
signal = 0;//清0
}
}
}
void speedHelper() interrupt 0{//下降沿触发,即轮子转的时候产生高电平再到低电平//外部中断处理函数
speedCnt++;//码盘转动了一个格子
}
- SendByte(speed) 并不合理,应该这么做:

3. 小车测速代码验证和BUG修改(283.128)
- 代码(20./11. 测速数据通过串口发送到上位机02)
#include "motor.h"
#include "delay.h"
#include "uart.h"
#include "reg52.h"
#include "timer.h"
#include "stdio.h"
sbit speedIO = P3^2; //外部中断0
unsigned int speedCnt = 0; //统计格子,脉冲次数
extern unsigned int speed; //速度
extern char signal; //主程序发速度数据的信号
char speedMes[24]; //主程序发速度数据的字符串缓冲区
void Ex0Init(){
EX0 = 1;//允许中断
//EA = 1;在串口初始化函数中已经打开了总中断
IT0 = 1;//外部中断的下降沿触发
}
void main(){
Timer0Init();
UartInit();//串口相关初始化
Ex0Init(); //外部中断初始化
while(1){
if(signal){//定时器1s到点,把signal置一,主程序发送速度
sprintf(speedMes,"speed:%d cm/s",speed);//字符串拼装,speed的值格式化为字符串,写入speedMes字符串缓冲区
SendString(speedMes);//速度发出去
signal = 0;//清0
}
}
}
void speedHelper() interrupt 0{//下降沿触发,即轮子转的时候产生高电平再到低电平//外部中断处理函数
speedCnt++;//码盘转动了一个格子
}
4. OLED二次开发为了显速度(284.129)
- 代码(20./12. OLED代码二次开发)
#include "reg52.h"
#include "intrins.h"
#include "OLED.h"
void main(){
Oled_Init();
Oled_Clear();
Oled_Show_Str(2,2,"speed:35cm/s");
while(1);//不让程序结束
}
5. 蓝乐控制且OLED和蓝牙显示速度(285.130)
- 代码(20./13. 蓝牙测速并本地显示的小车)
#include "motor.h"
#include "delay.h"
#include "uart.h"
#include "reg52.h"
#include "timer.h"
#include "stdio.h"
#include "OLED.h"
sbit speedIO = P3^2; //外部中断0
unsigned int speedCnt = 0; //统计格子,脉冲次数
extern unsigned int speed; //速度
extern char signal; //主程序发速度数据的信号
char speedMes[24]; //主程序发速度数据的字符串缓冲区
void Ex0Init(){
EX0 = 1;//允许中断
//EA = 1;在串口初始化函数中已经打开了总中断
IT0 = 1;//外部中断的下降沿触发
}
void main(){
Timer0Init();
UartInit();//串口相关初始化
Ex0Init(); //外部中断初始化
Oled_Init();
Oled_Clear();
while(1){
if(signal){//定时器1s到点,把signal置一,主程序发送速度
sprintf(speedMes,"speed:%d cm/s",speed);//字符串拼装,speed的值格式化为字符串,写入speedMes字符串缓冲区
SendString(speedMes);//速度发出去
signal = 0;//清0
Oled_Show_Str(2,2,speedMes);
}
}
}
void speedHelper() interrupt 0{//下降沿触发,即轮子转的时候产生高电平再到低电平//外部中断处理函数
speedCnt++;//码盘转动了一个格子
}
6. wifi控制小车并发送速度(286.131)
- 代码(20./14. wifi测速并本地显示的小车)
#include "motor.h"
#include "delay.h"
#include "uart.h"
#include "reg52.h"
#include "timer.h"
#include "stdio.h"
#include "OLED.h"
#include "esp8266.h"
sbit speedIO = P3^2; //外部中断0
unsigned int speedCnt = 0; //统计格子,脉冲次数
extern unsigned int speed; //速度
extern char signal; //主程序发速度数据的信号
char speedMes[24]; //主程序发速度数据的字符串缓冲区
//4 发送数据
code char sendData [] = "AT+CIPSEND=0,6\r\n";
void Ex0Init(){
EX0 = 1;//允许中断
//EA = 1;在串口初始化函数中已经打开了总中断
IT0 = 1;//外部中断的下降沿触发
}
void main(){
Timer0Init();
UartInit();//串口相关初始化
Delay1000ms();//给espwifi模块上电时间
initWifi_AP();//初始化wifi工作在ap模式
waitConnect();//等待客户端的连接
Ex0Init(); //外部中断初始化
Oled_Init(); //oled初始化
Oled_Clear(); //OLED清屏
while(1){
if(signal){//定时器1s到点,把signal置一,主程序发送速度
SendString(sendData);//4 发送数据
Delay1000ms();
sprintf(speedMes,"speed:%d cm/s",speed);//字符串拼装,speed的值格式化为字符串,写入speedMes字符串缓冲区
SendString(speedMes);//速度发出去
signal = 0;//清0
Oled_Show_Str(2,2,speedMes);
}
}
}
void speedHelper() interrupt 0{//下降沿触发,即轮子转的时候产生高电平再到低电平//外部中断处理函数
speedCnt++;//码盘转动了一个格子
}
7. 4g模块控制小车(287.132)
- 代码不做修改,直接复制蓝牙测速小车
- 4g 模块只要做好内网穿透外网透传就可以了
- 代码(20./15. 4g模块控制小车)
8. 非特定语音识别方案介绍(~.133)
- SU-03T(还有 LD3320)
- 购买地址:https://item.taobao.com/item.htm?spm=a1z09.2.0.0.4c9d2e8d7NyISY&id=660663988887&_u=nbdq6ut5ec8

- 此语音模块不需编程,不需二次开发:通过厂家给的网站配置后即可使用,傻瓜式操作
- 想要稍微开发点语音相关代码,LD3320 模块需要二次开发,根据厂家给的源码并二次开发添加识别词条
9. SU-03T语音模块的配置使用(~.134)
- 非特定人语音识别特征提取算法的研究
- https://xueshu.baidu.com/usercenter/paper/show?paperid=1c530gm02v7400n0er5g08m07n159657
-
进入官网,注册并登陆
- http://www.smartpi.cn/#/
-
创建产品
- 其他产品、纯离线方案、SU-03T、名称、中文、下一步
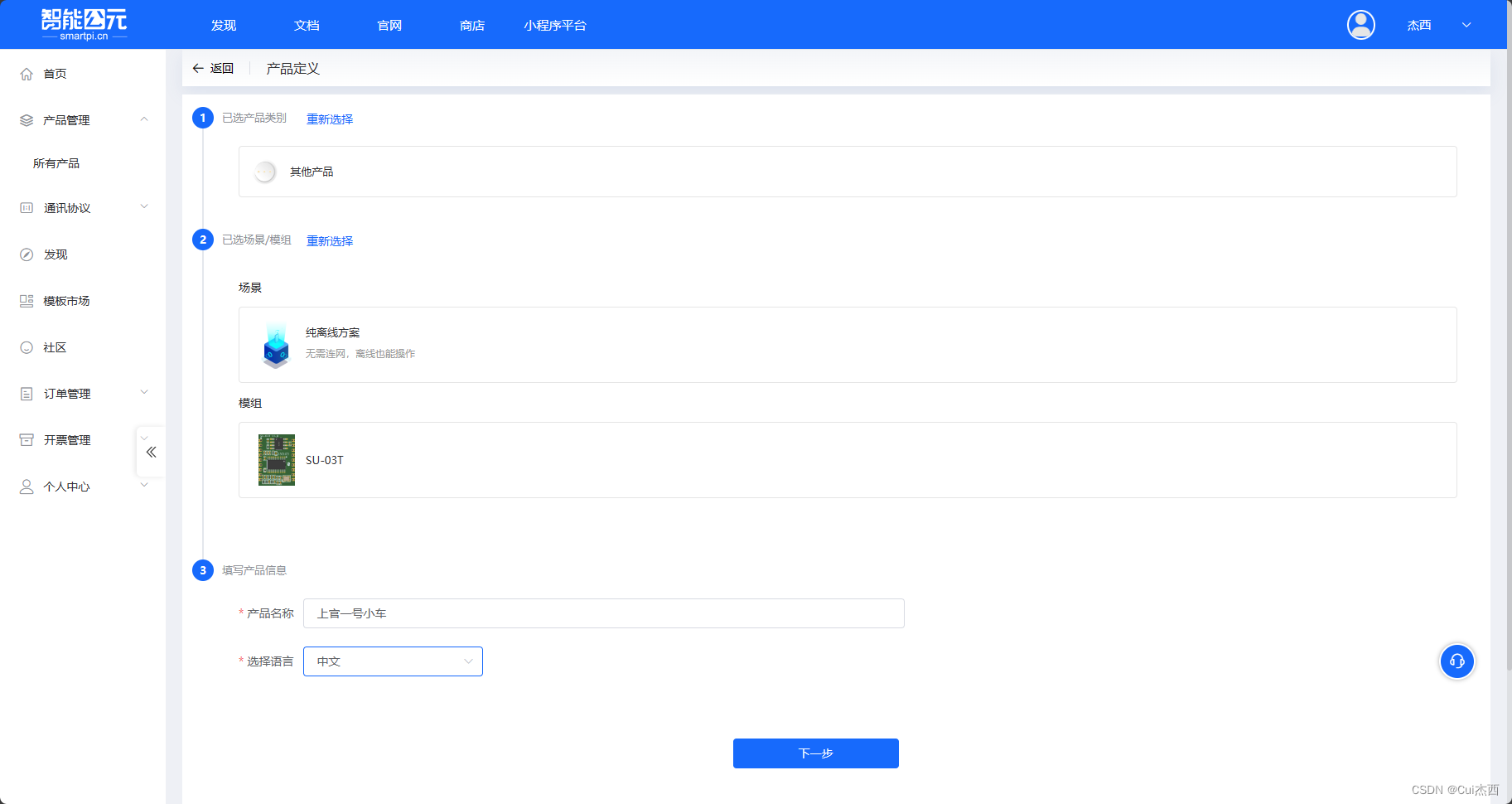
- 其他产品、纯离线方案、SU-03T、名称、中文、下一步
-
Pin脚配置
- A25-A27 改为默认高电平

- A25-A27 改为默认高电平
-
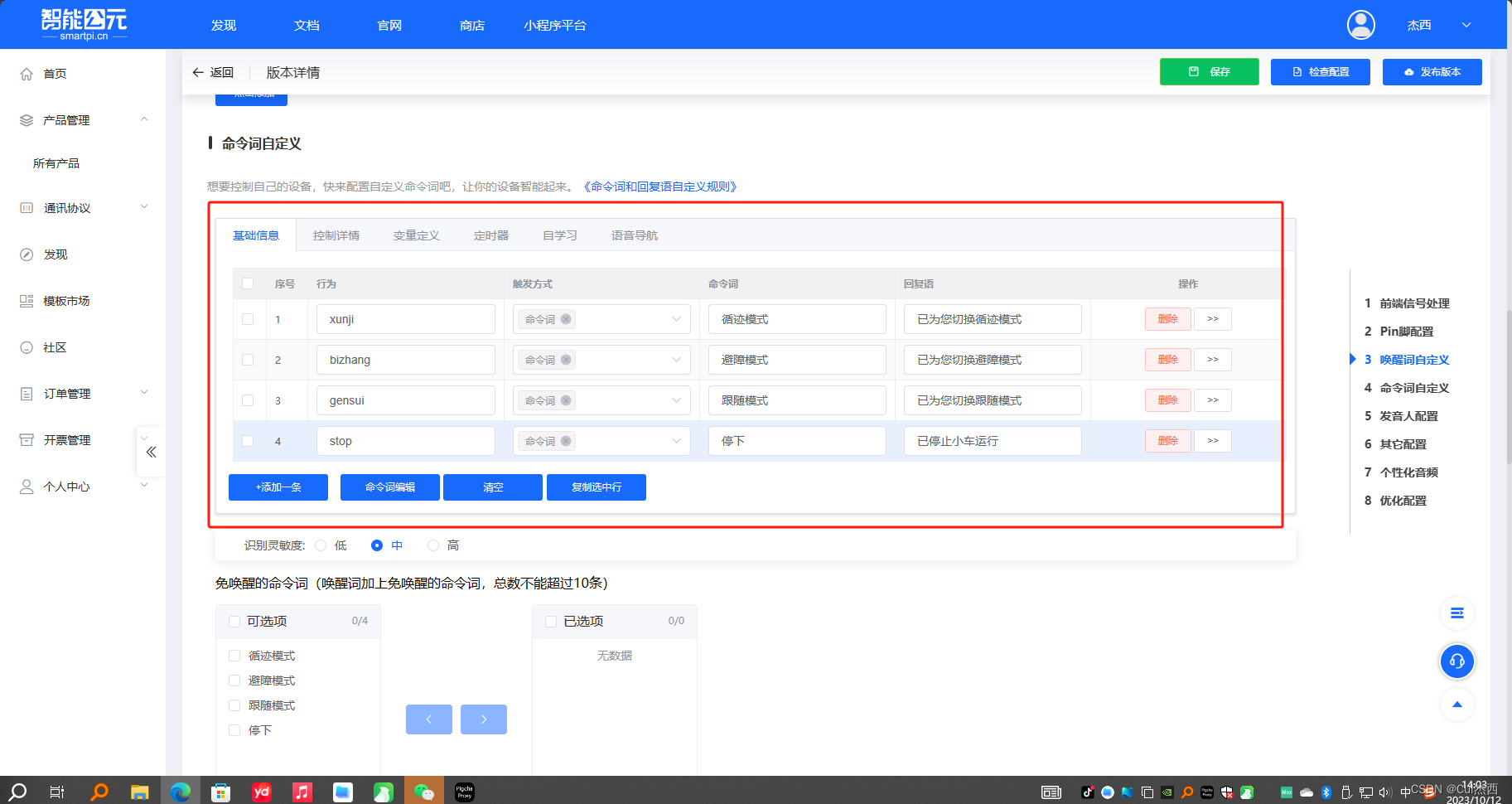
唤醒词自定义和唤醒回复配置
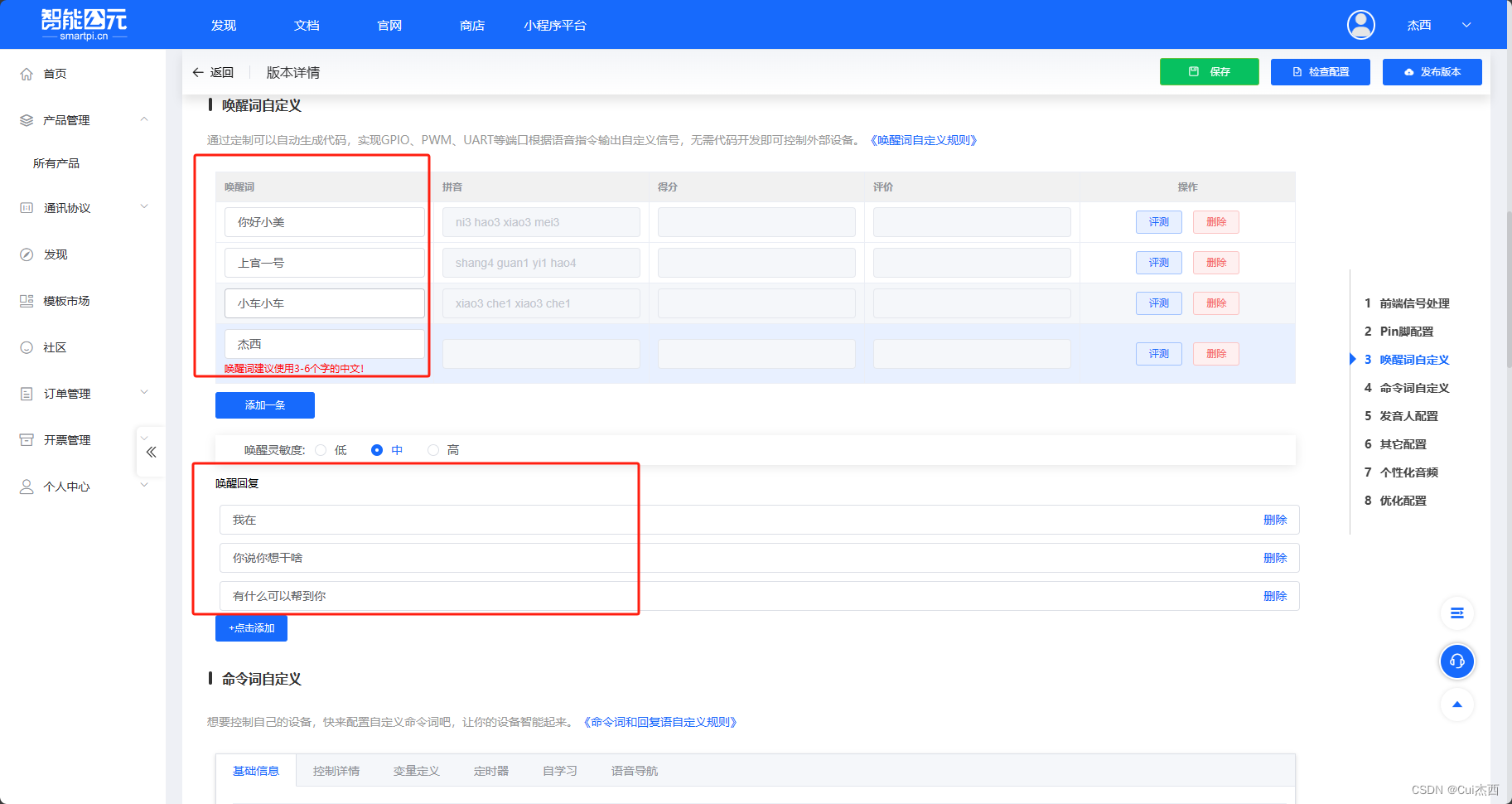
-
命令词自定义
1)“基础信息”配置
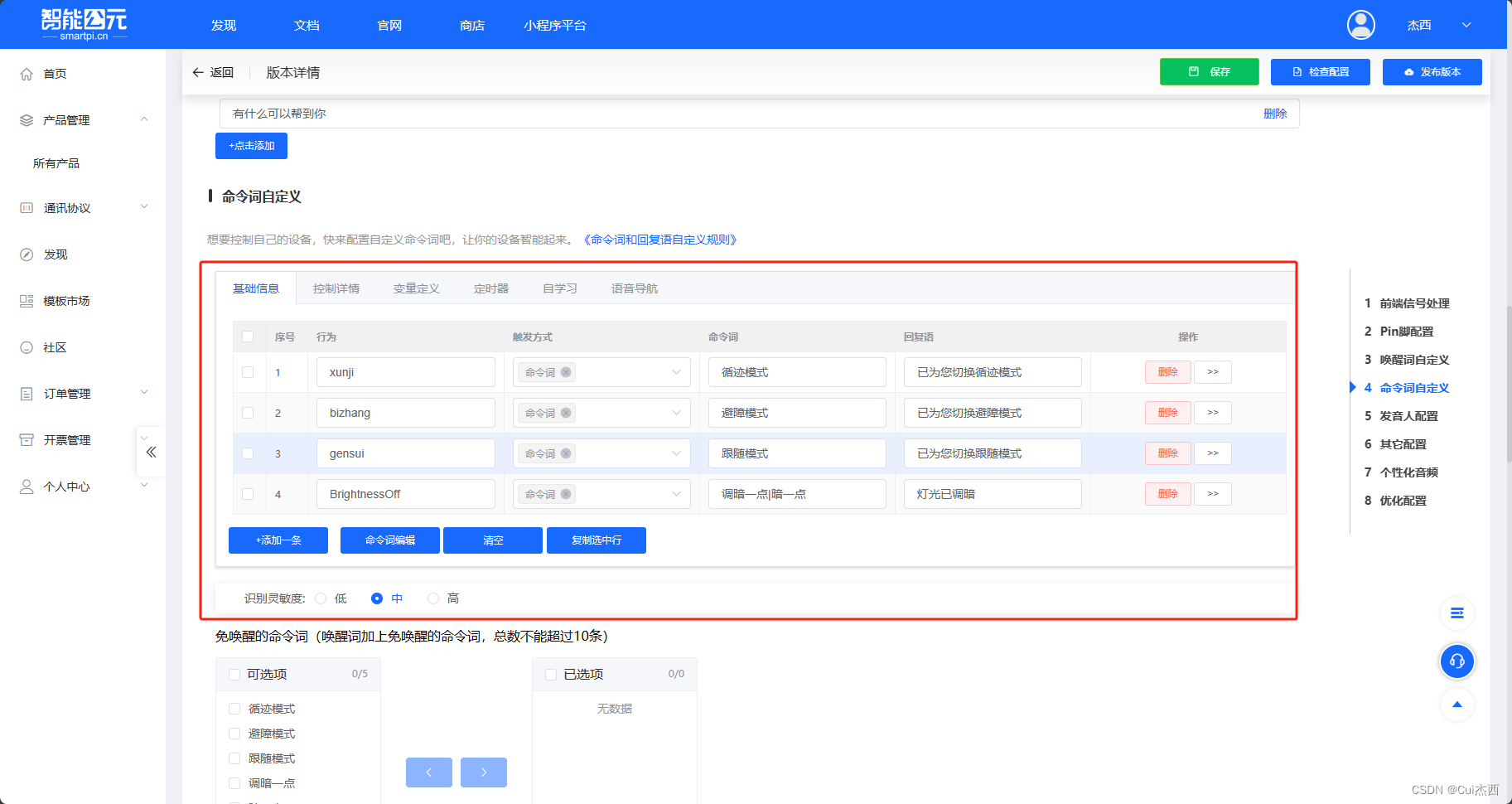
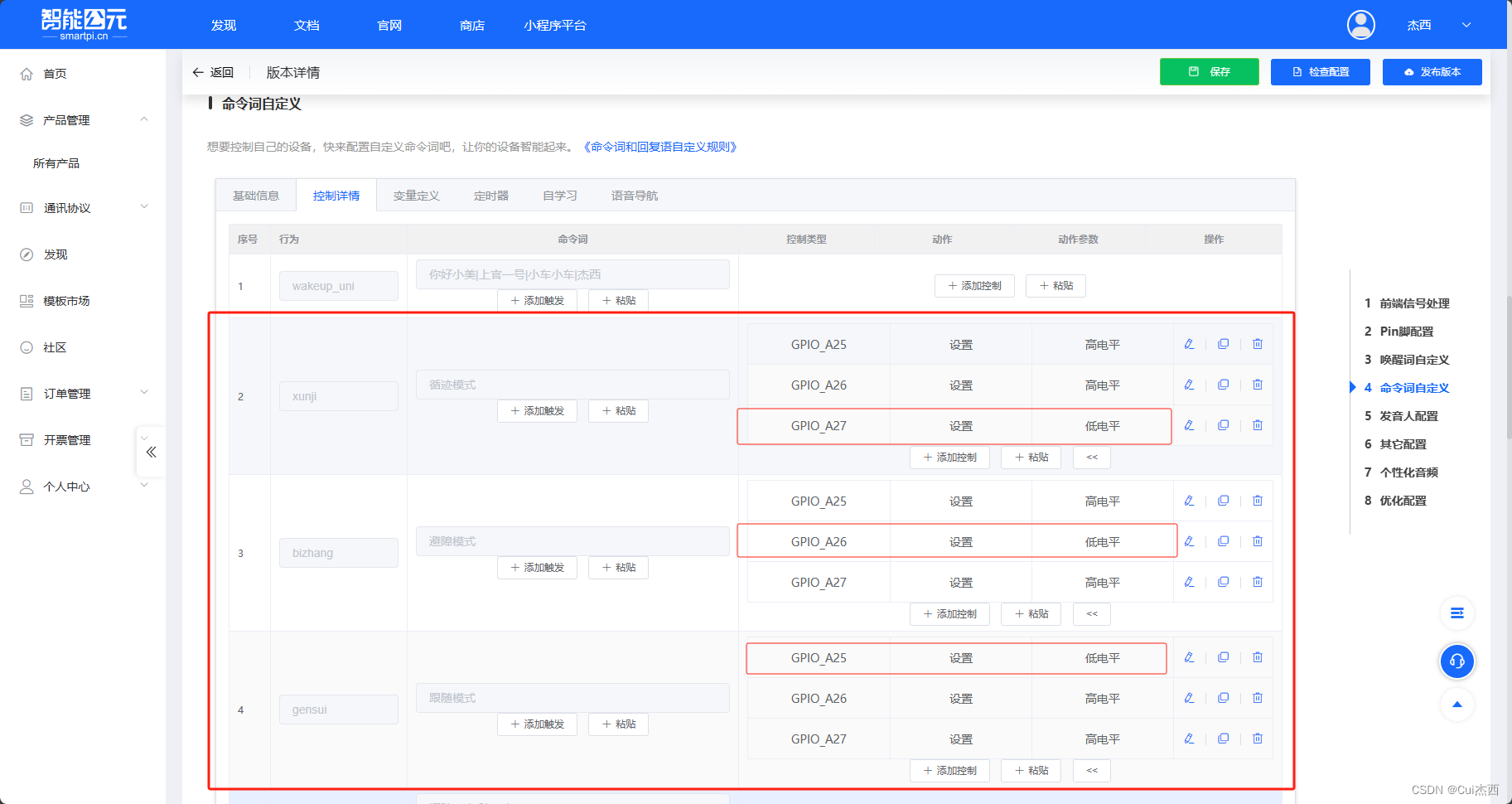
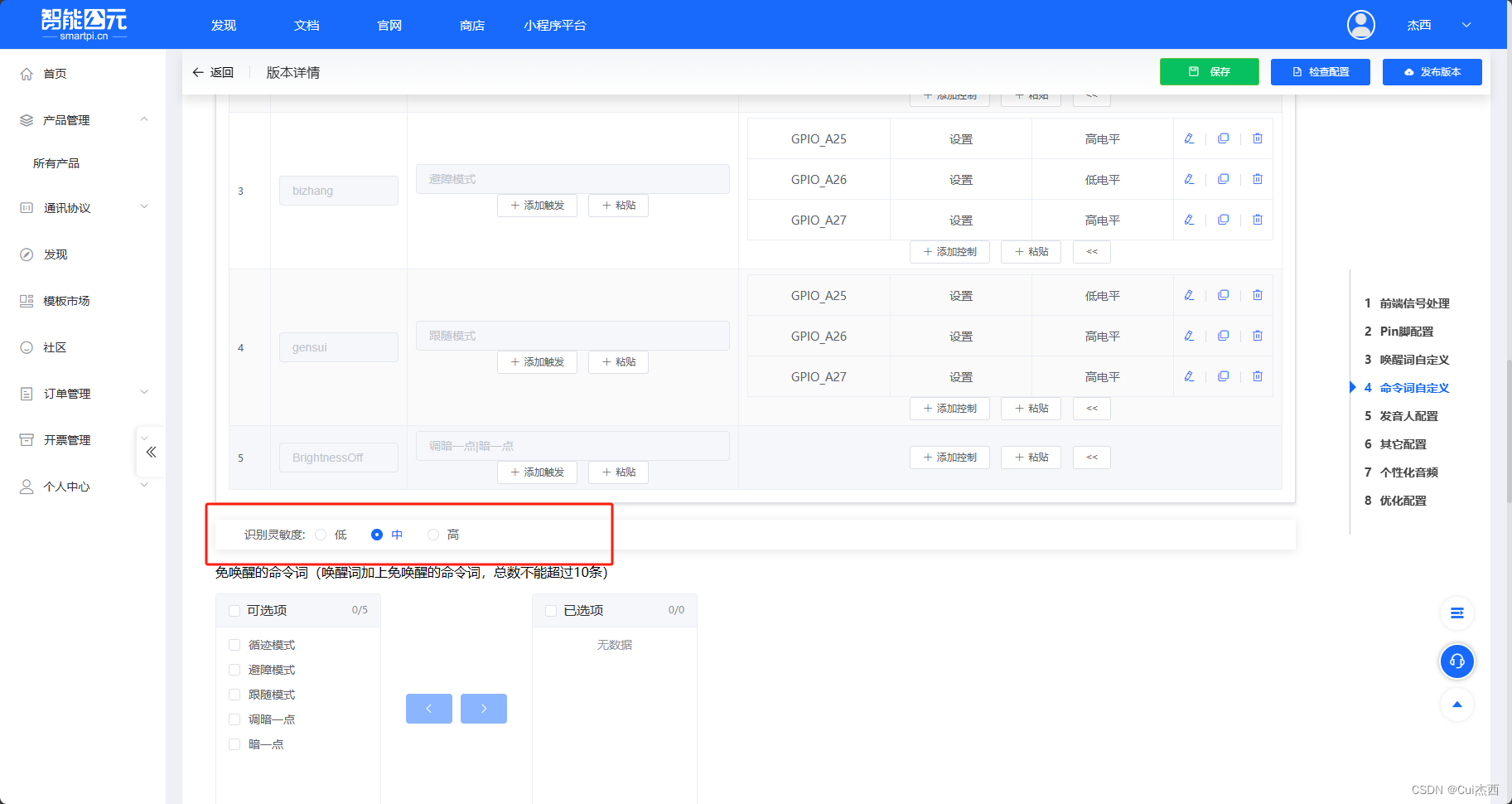
2)“控制详情”配置:添加控制


3)“识别灵敏度”配置:中
6. 发音人配置
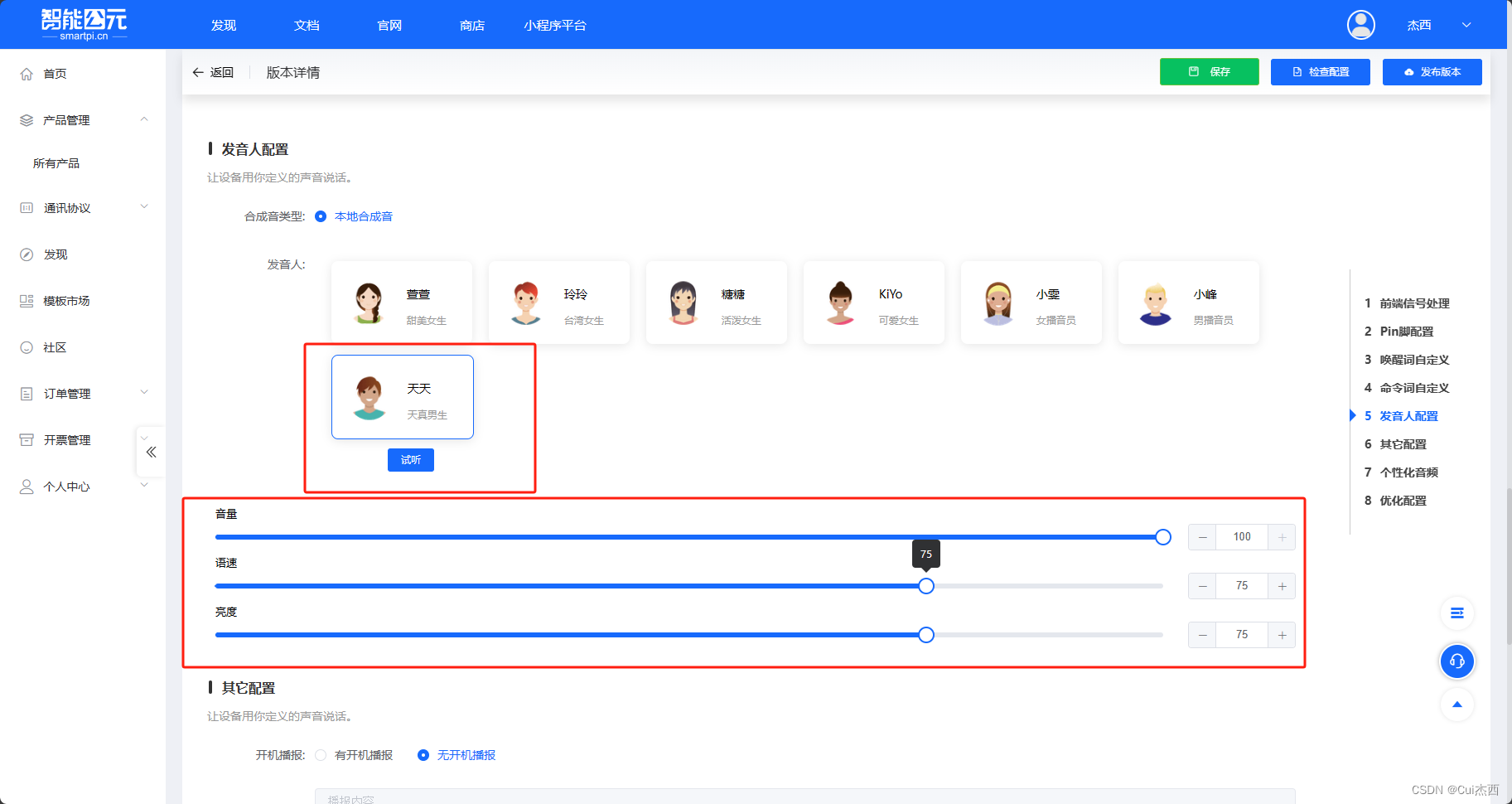
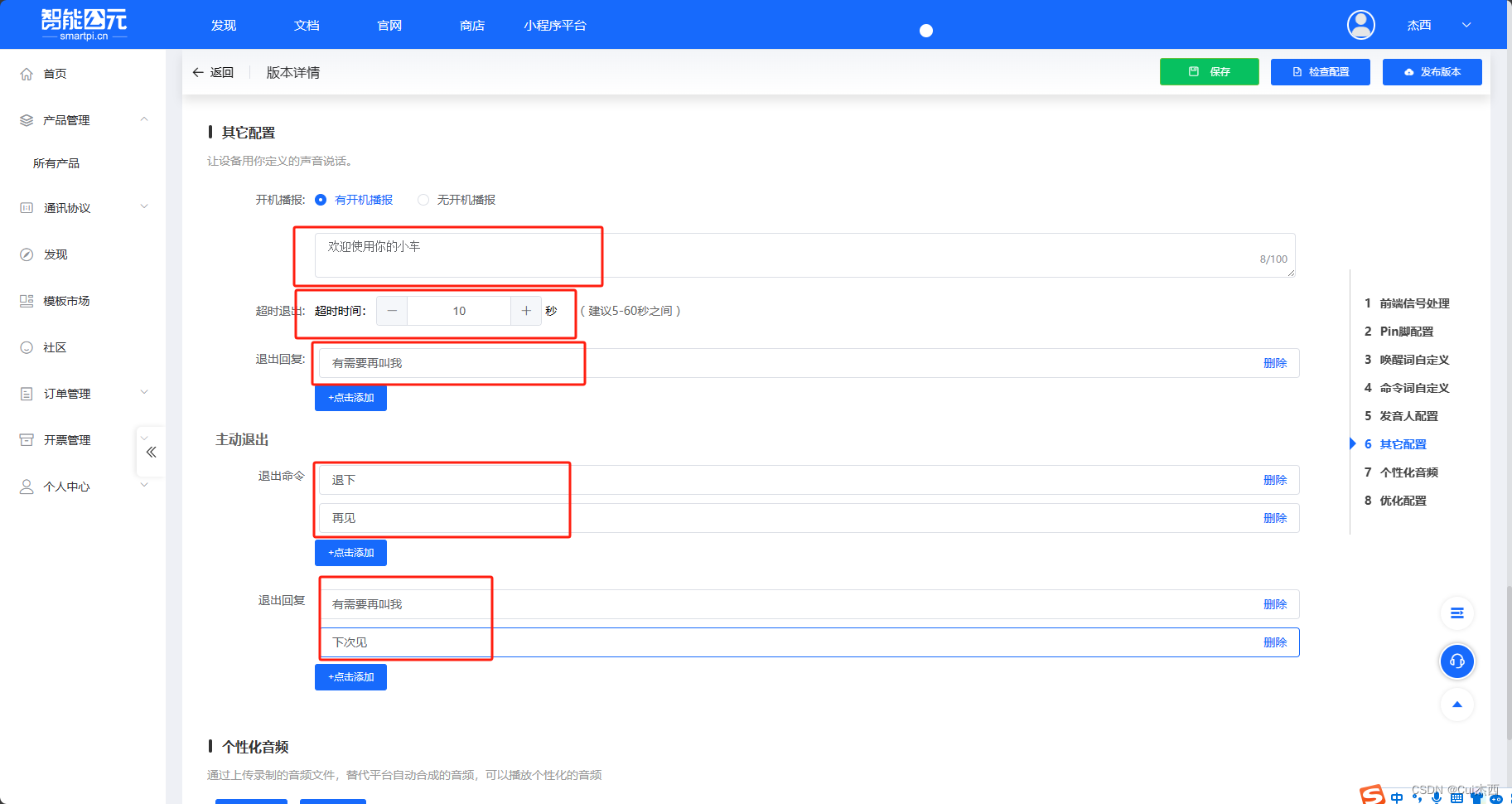
7. 其他配置
8. 发布版本
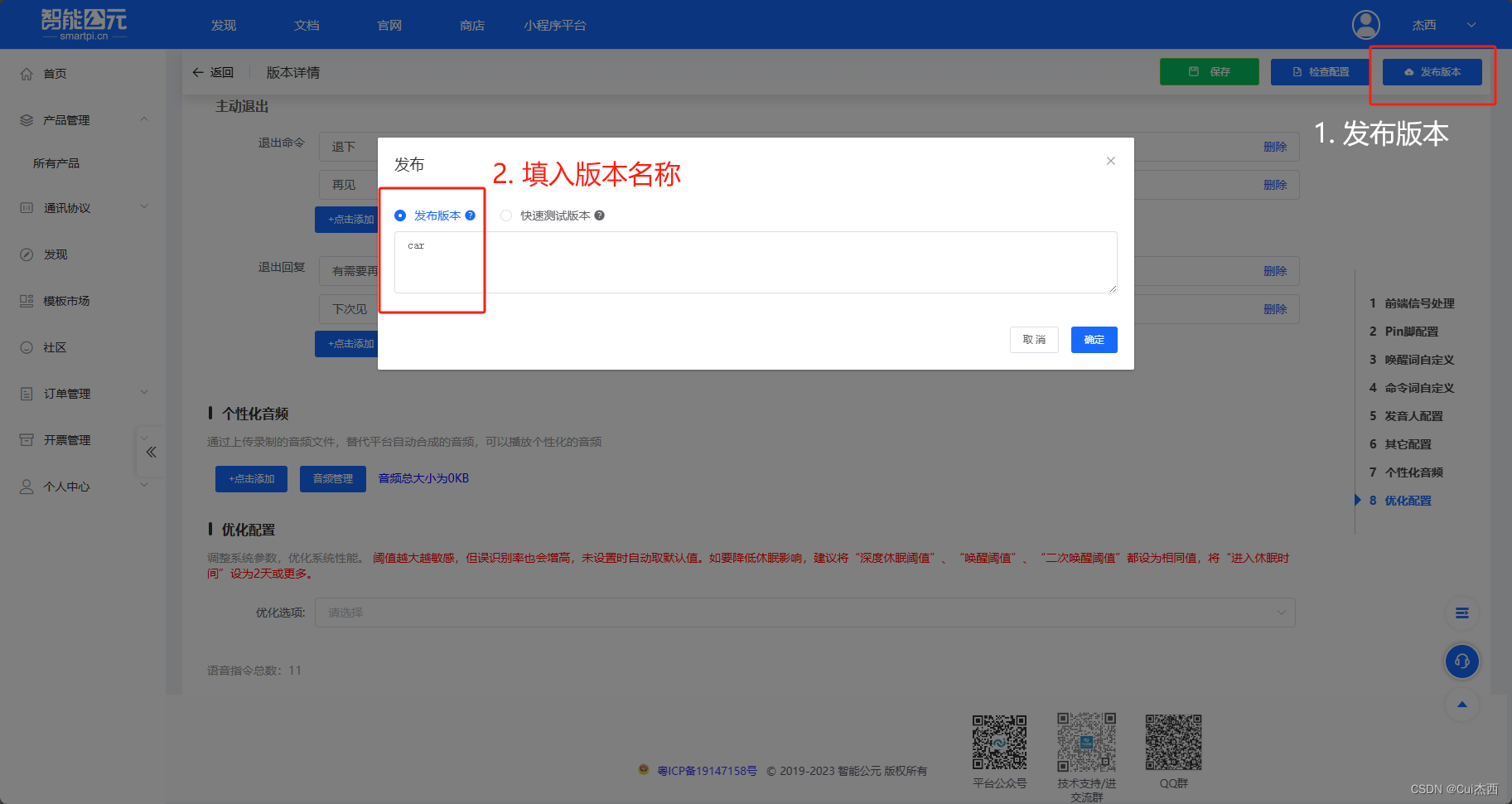
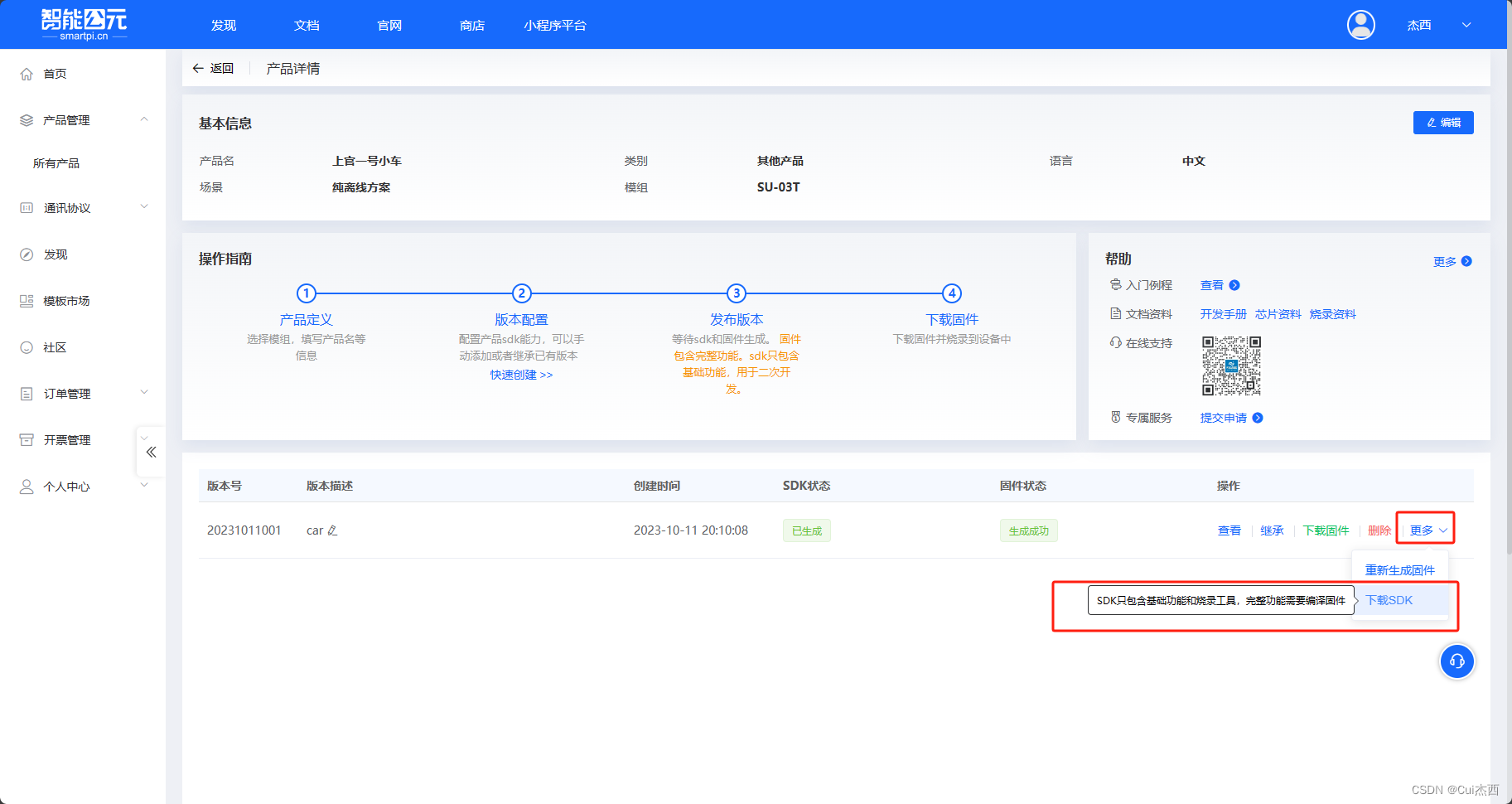
9. 半小时左右后下载sdk固件

10. SU-03T固件烧录并语音识别测试(288.135)
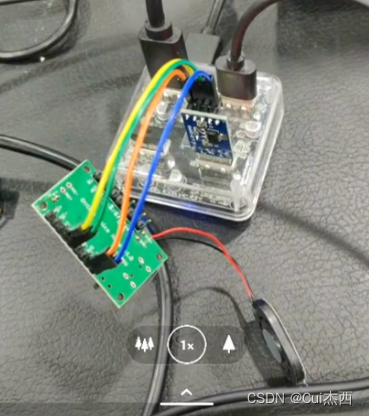
- 提前做 语言模块和 ttl 的接线:
- B7 引脚 接 串口工具 RXD
- B6 引脚 接 串口工具 TXD
- GND 接 串口工具 GND
- VCC 接 串口工具 5V
- 将上节课生成的文件解压

- 将解压后的文件夹放至非中文路径下、以管理员身份打开 “UniOneUpdateTool.exe” 文件
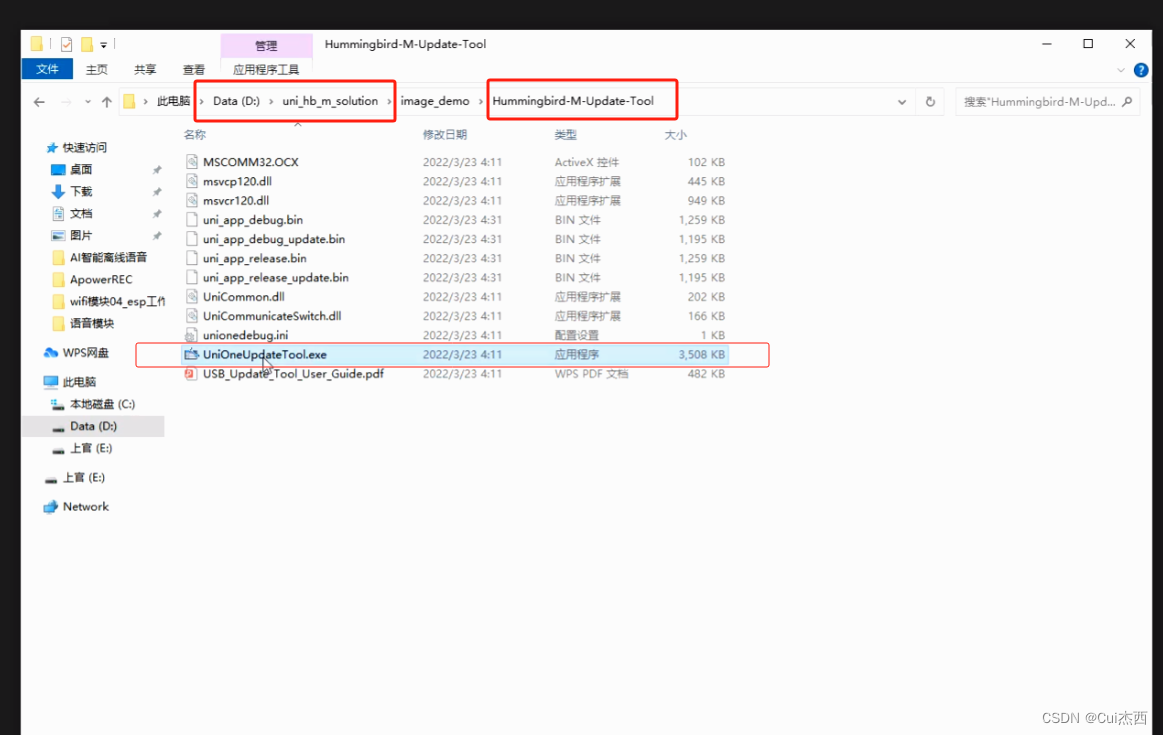
- 将 usb-ttl 插入电脑接口
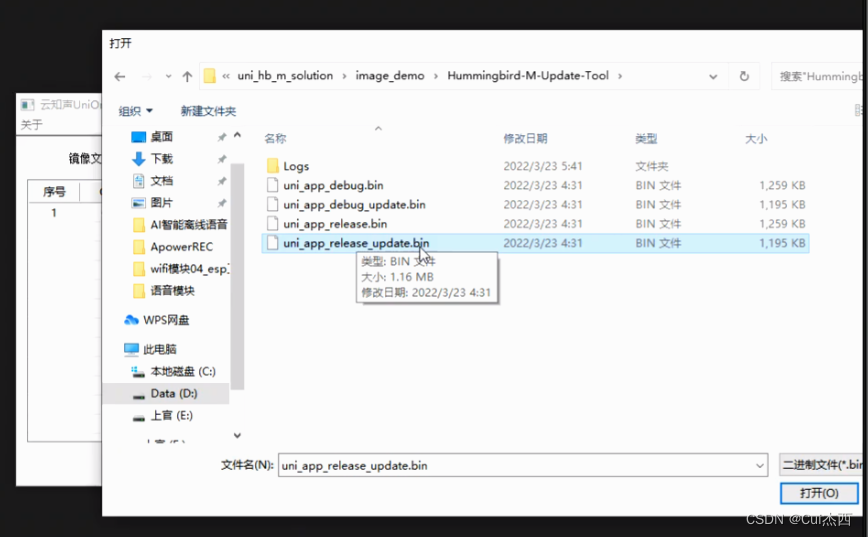
- 打开软件,选择镜像文件 “uni_app_release_update.bin”
- 下电至 OFF

- 点“烧录”
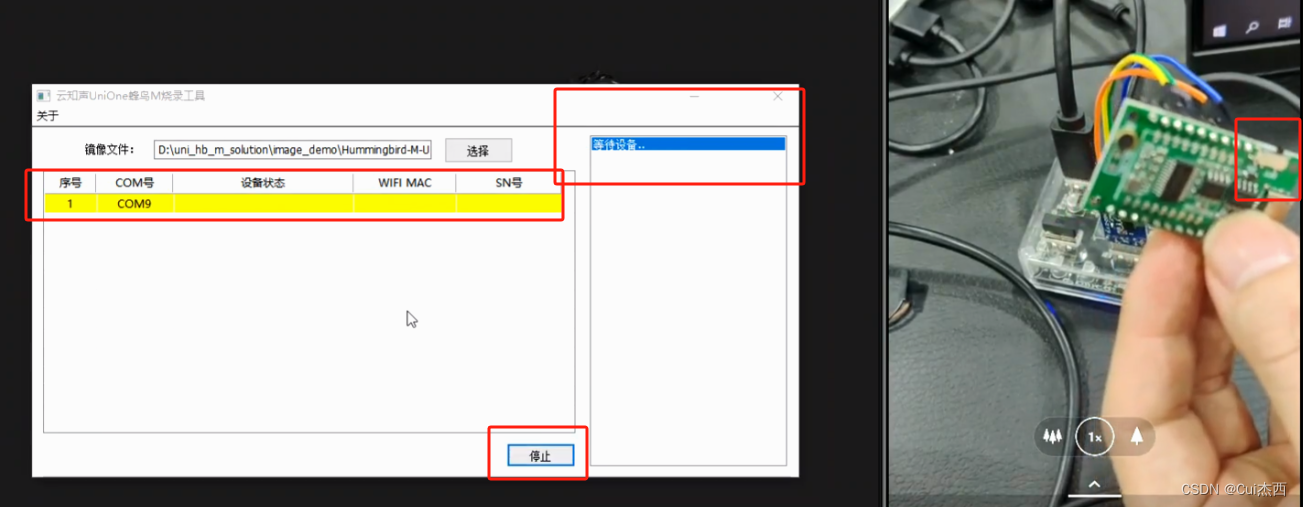
- 上电至 ON

- 开始烧录
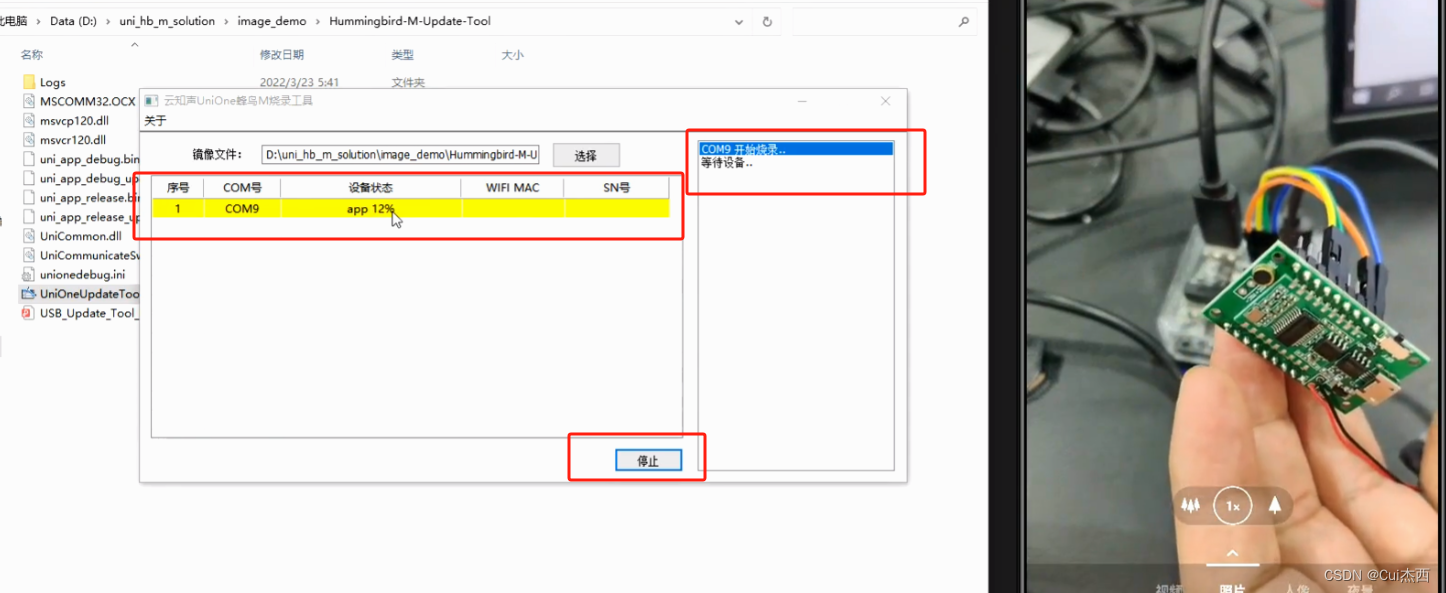
- 下载完成,烧录结束
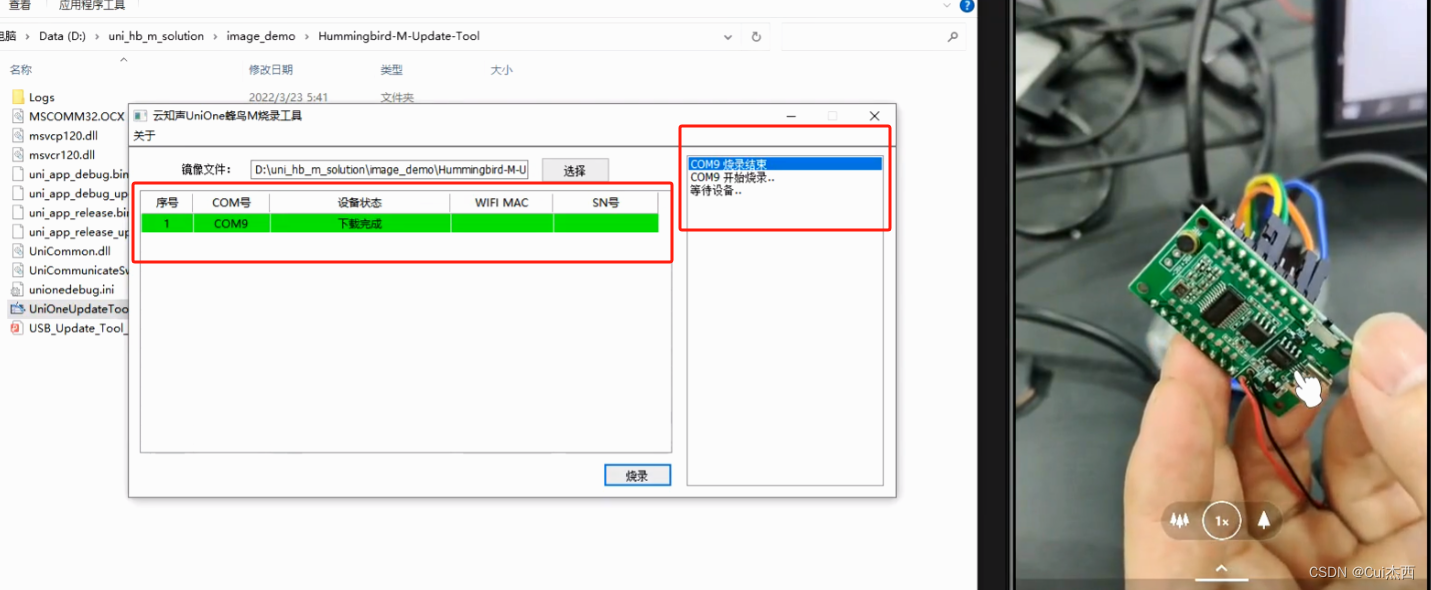
- 即可进行语音测试
11. 语音识别切换小车循迹避障跟随且OLED显示状态(289.136)
- 代码(20./16. 语音识别切换小车寻迹避障跟随并oled显示)
#include "reg52.h"
#include "hc04.h"
#include "delay.h"
#include "sg90.h"
#include "motor.h"
#include "OLED.h"
#define MIDDLE 0
#define LEFT 1
#define RIGHT 2
#define XJ 3
#define GS 4
#define BZ 5
#define ST 6
sbit A25 = P1^5;
sbit A26 = P1^6;
sbit A27 = P1^7;
sbit leftSensorXJ = P2^7;
sbit rightSensorXJ = P2^6;
sbit leftSensorGS = P2^5;
sbit rightSensorGS = P2^4;
char dir;
double disMiddle;
double disLeft;
double disRight;
void xunjiMode(){
if(leftSensorXJ == 0 && rightSensorXJ == 0){//左右都反射回来,都低电平,直走,灯都亮
goForward();
}
if(leftSensorXJ == 1 && rightSensorXJ == 0){//左边没反射回来,左高电平,左转,右灯亮
goLeft();
}
if(leftSensorXJ == 0 && rightSensorXJ == 1){//右边没反射回来,右高电平,右转,左灯亮
goRight();
}
if(leftSensorXJ == 1 && rightSensorXJ == 1){//左右都没反射回来,都高电平,停,灯都不亮
stop();
}
}
void gensuiMode(){
if(leftSensorGS == 0 && rightSensorGS == 0){//两边都反射回来了,都低电平,直走
goForward();
}
if(leftSensorGS == 1 && rightSensorGS == 0){//右边反射回来了,右低电平,右转
goRight();
}
if(leftSensorGS == 0 && rightSensorGS == 1){//左边反射回来了,左低电平,左转
goLeft();
}
if(leftSensorGS == 1 && rightSensorGS == 1){//两边都没反射回来,都高电平,停
stop();
}
}
void bizhangMode(){
if(dir != MIDDLE){
sgMiddle();
dir = MIDDLE;
Delay300ms();
}
disMiddle = getDistance();
if(disMiddle > 35){
//前进
goForward();
}else if(disMiddle < 10){
goBack();
}else{
//停止
stop();
//sg左转 测左边距离
sgLeft();
Delay300ms();
disLeft = getDistance();
sgMiddle();
Delay300ms();
//sg右转 测右边距离
sgRight();
dir = RIGHT;
Delay300ms();
disRight = getDistance();
if(disLeft < disRight){
goRight();
Delay150ms();
stop();
}
if(disLeft > disRight){
goLeft();
Delay150ms();
stop();
}
}
}
void main(){
int mark = 0;
Timer0Init();//定时器0初始化(为舵机)
Timer1Init();//定时器1初始化(为超声波测距)
sgMiddle(); //舵机初始化位置(避障)
Delay2000ms();
dir = MIDDLE;
Oled_Init(); //OLED初始化
Oled_Clear();
Oled_Show_Str(2,2,"-----Ready----");
while(1){
//满足寻迹模式的条件
if(A25 == 0 && A26 == 1 && A27 == 1){
if(mark != XJ){
Oled_Clear();
Oled_Show_Str(2,2,"-----XunJi----");
}
mark = XJ;
xunjiMode();
}
//满足跟随模式的条件
if(A25 == 1 && A26 == 0 && A27 == 1){
if(mark != GS){
Oled_Clear();
Oled_Show_Str(2,2,"-----GenSui----");
}
mark = GS;
gensuiMode();
}
//满足避障模式的条件
if(A25 == 1 && A26 == 1 && A27 == 0){
if(mark != BZ){
Oled_Clear();
Oled_Show_Str(2,2,"-----BiZhang----");
mark = BZ;
bizhangMode();
}
}
//满足stop的条件
if(A25 == 0 && A26 == 0 && A27 == 0){
if(mark != ST){
Oled_Clear();
Oled_Show_Str(2,2,"-----STOP----");
mark = ST;
stop();
}
}
}
}