一.硬件介绍




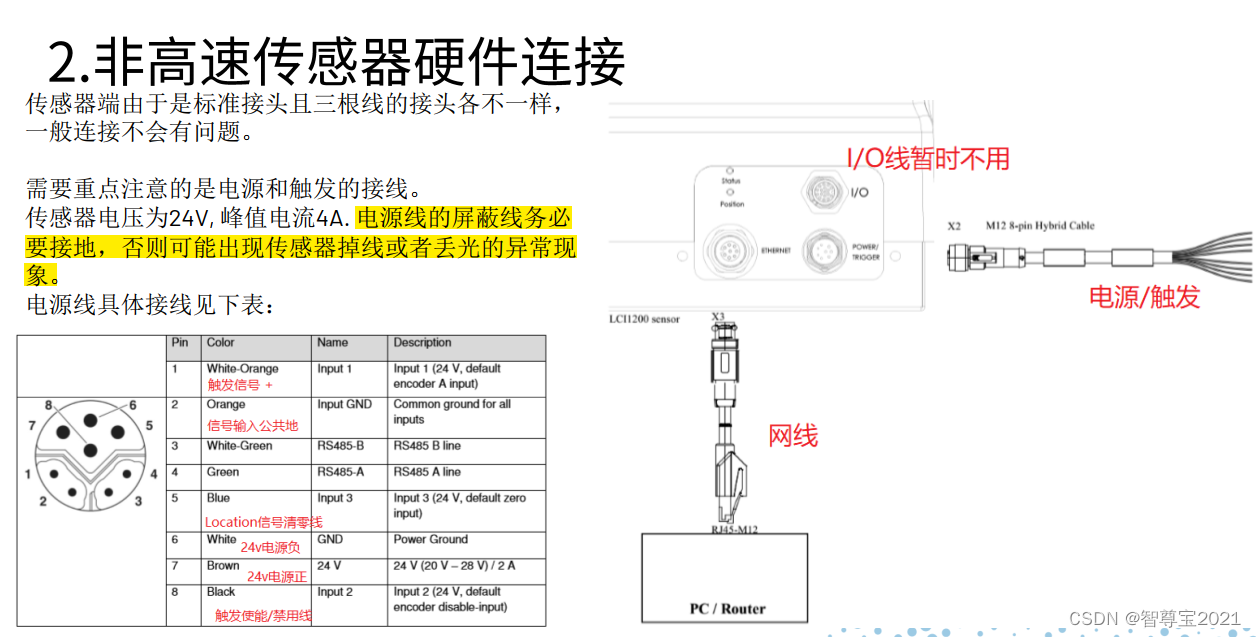
以上特别注意: 屏蔽线必须接地,因为在现场实际调试中,使用 软件调试发现经常 弹窗 传感器丢失警告!!
软件调试发现经常 弹窗 传感器丢失警告!!
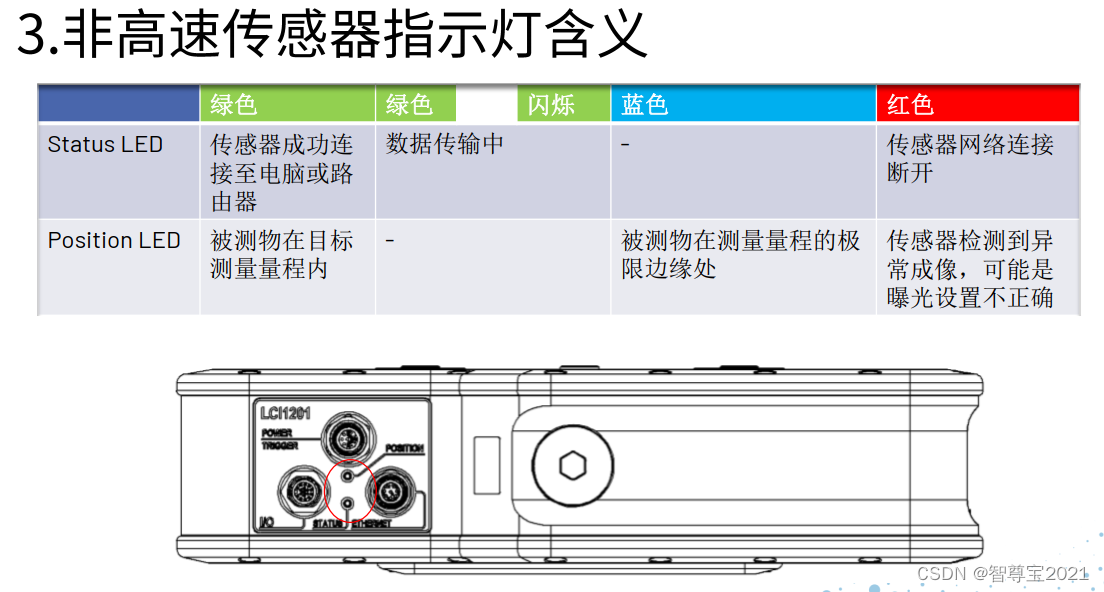
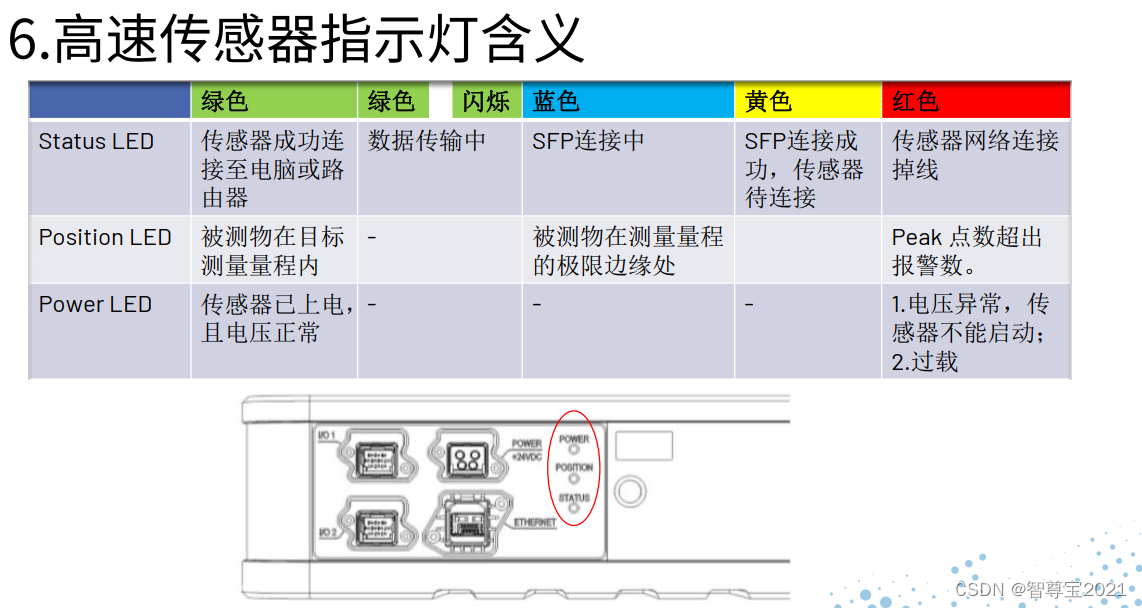
以上 Position LED 的灯被钣金挡住,无法查看异常现象,能否将指示灯设置在软件界面上?

需要确认是软触发还是硬触发,理论上 硬触发比软触发速度要快.(我们目前使用的1620是高速传感器).
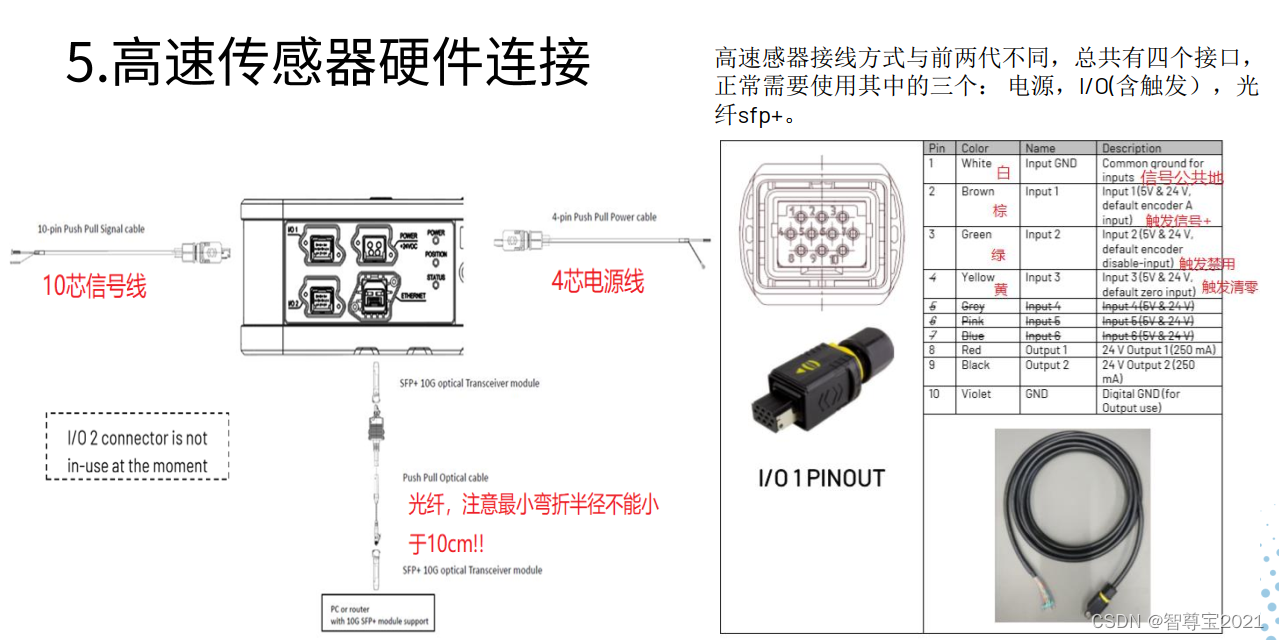
注意:弯折半径,光纤线在设备里最好不要弯折
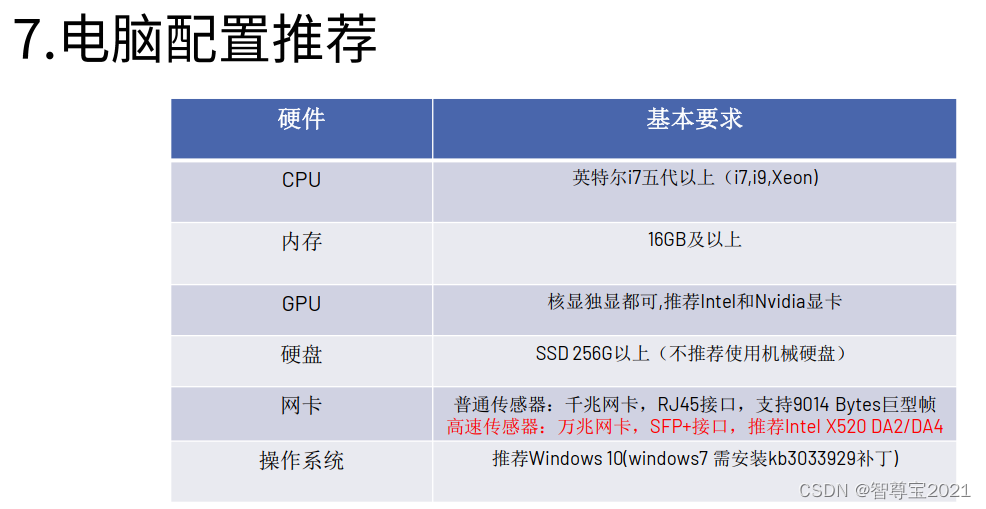
我们现在使用的是高速传感器1620,要确认是否是万兆网卡.

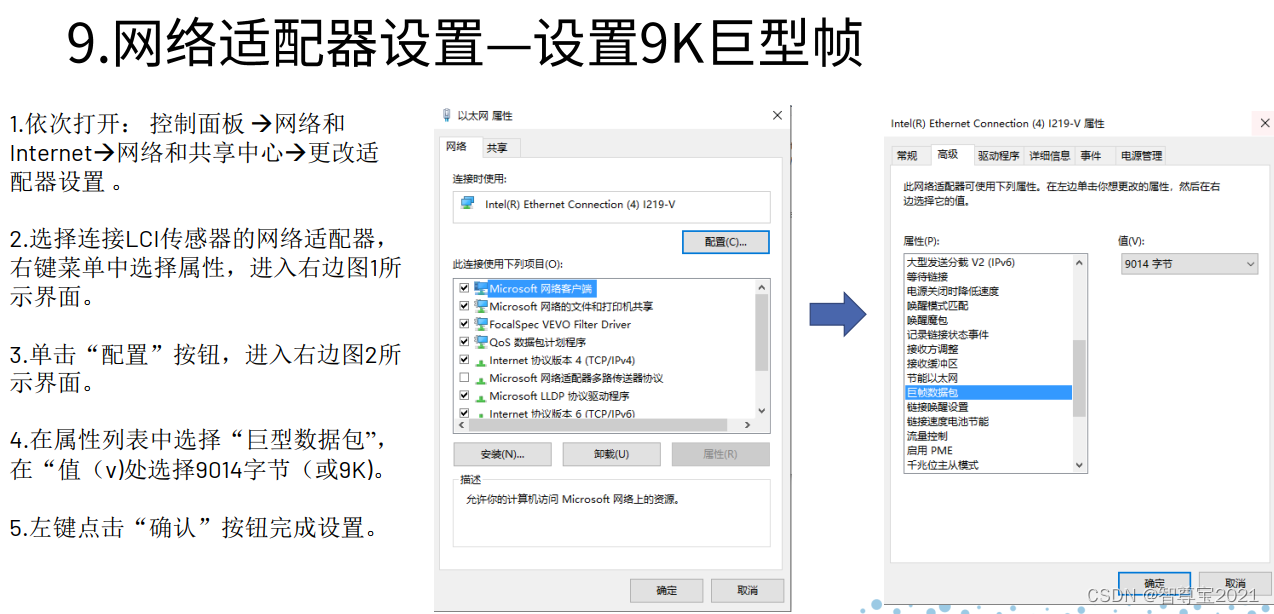
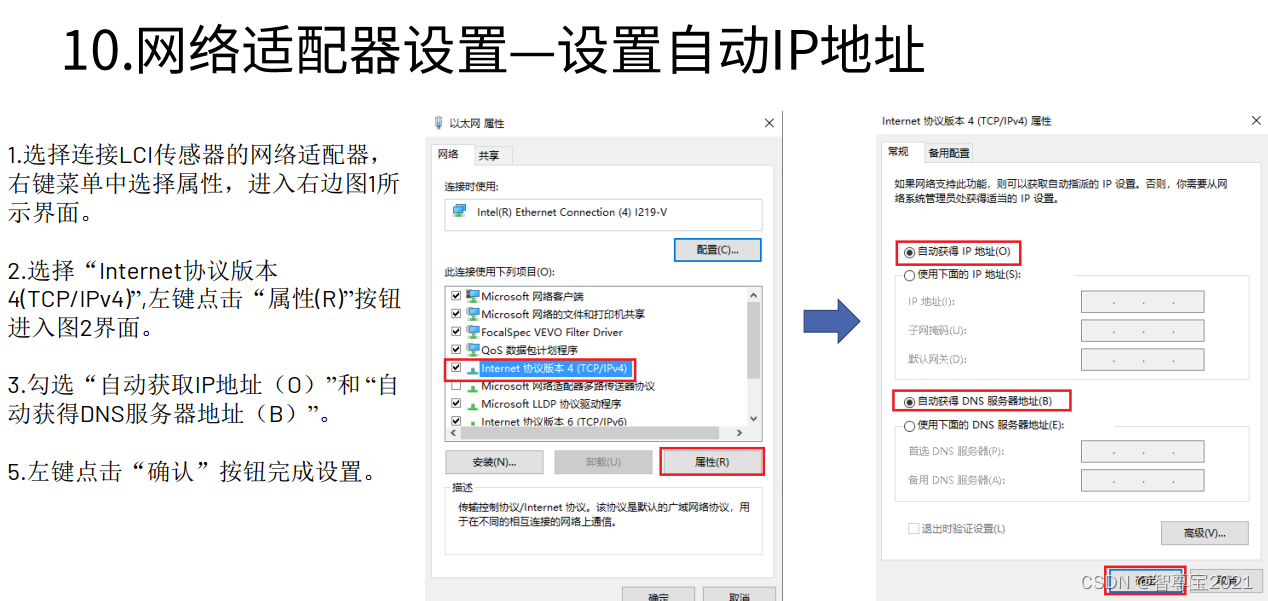
确认设置是否正确?
二.3D线激光传感器 相关知识
3D线激光传感器简介
在传统的2D视觉中,解决方案的核心由工业相机、镜头和光源组成。根据客户的要求和现场条件,我们可以利用一些计算公式来选择适合的工业相机和镜头,最终在满足客户成本要求的基础上进行选择。其中最复杂的一部分是选择合适的光源,能够根据被测试物体的不同特性来保证图像清晰。显然,2D视觉对工程师的要求较高,需要有丰富的项目经验和一定的光学和软件知识。相对而言,使用3D线激光传感器则相对简单一些。
一般来说,3D线激光传感器的设计会将其融入到一个框架中,与2D视觉系统不同。3D机器视觉镜头的光学系统通常由几组透镜组成。每组透镜可能是独立的透镜,也可能是由两片或更多的单片透镜胶合在一起。
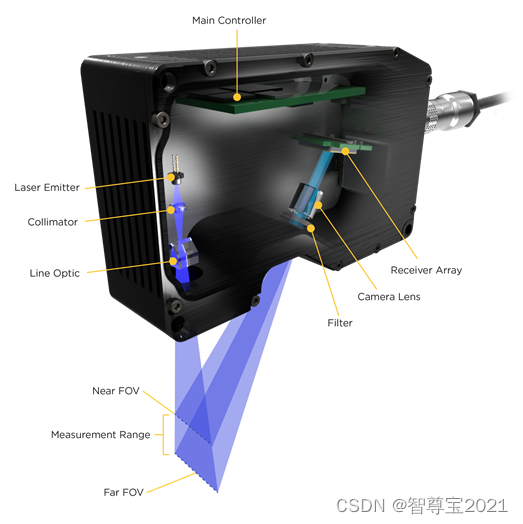
在3D视觉中,激光发射器取代了光源。通过复杂的光学系统设计,激光发射器发出的激光会形成一条直线,照射到物体表面后会发生反射。在光学系统的设计下,反射光会被镜头捕捉到,最后通过镜头反射到感光芯片上。因此,3D相机内部最重要的三个部件是激光发射器、镜头和感光芯片。此外,还会添加一些FPGA或ARM用于图形处理,例如图像算法和图像滤波。通常情况下,激光发射器需要由优秀的光学工程师进行设计,因为不同的透镜反射出的激光效果也不同。镜头基本上和我们普通使用的镜头类似,感光芯片一般会选择高精度的CMOS芯片。
一般来说,我们将激光线的方向称为X方向,即激光投射出来的线条定义为X轴,高度则是Z方向。通过一次静态拍照,我们能够获取X和Z两个方向的数据。那么Y方向又如何呢?通常我们将运动方向记为Y方向。也就是说,我们可以通过移动相机或移动物体,并且让相机持续不断地拍照,这样就形成了连续的Y方向数据。最后,将这些数据组合在一起,就得到了我们所需的3D数据。
原理
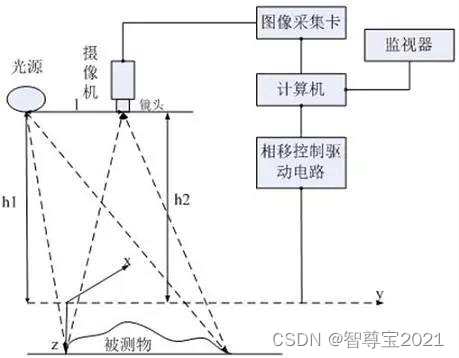
三角测距法是一种基于光学三角原理的测距方法,又被称为主动三角法。它利用光源、物体和检测器之间的几何成像关系来确定三维空间物体各点的坐标。在实际测量中,常常使用激光作为光源,并使用CCD相机作为检测器。这种方法主要应用于工业勘探、工件表面粗糙度检测、轮胎检测、飞机检测等工业、航空和军事领域,而尚未被应用于消费电子产品。
主要参数
在2D视觉领域,存在许多专业术语,例如视野、分辨率和重复精度等,而在3D视觉中也是一样的情况。
在3D视觉中大致以以下术语:
1.视野范围/视场(FOV)
视场宽度指的是传感器在特定工作距离下激光线能够扫描到的最大宽度。在2D视觉中,视场宽度通常由两个值表示,即X方向和Y方向的宽度;而在3D视觉中,视场宽度只有一个值。一般情况下,视场宽度可以理解为激光线在传感器最佳工作距离下的长度。需要注意的是,这里指的是工作距离下的长度,因为激光发射形成了一个光面,如果没有被遮挡的话,理论上是无限长的。
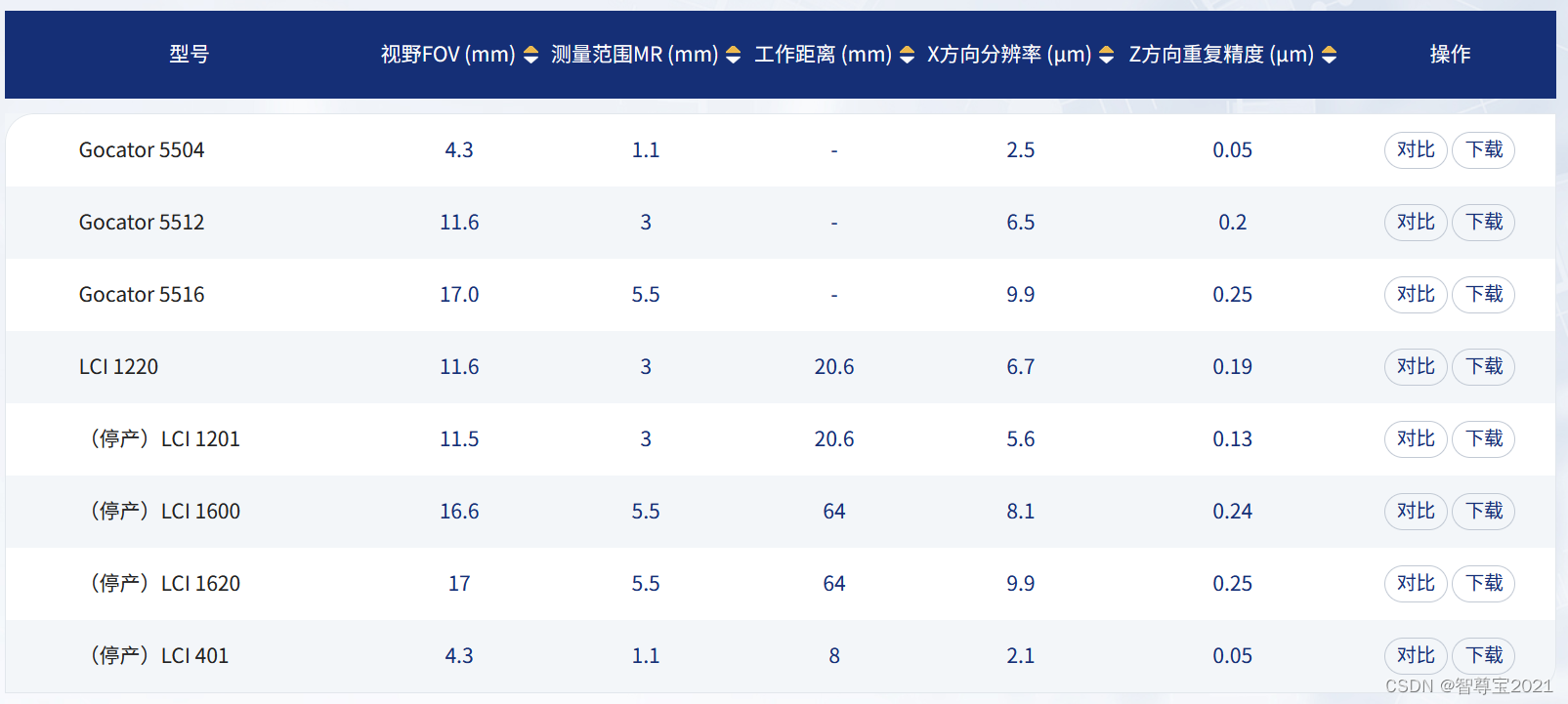
注意:以上灰色的我有疑问,按照厂商给的参数表的视野 LCI1620的是 17mm,那么这里的视野应该是指静态下X的长度.
2.测量范围(最佳成像范围)
传感器的近视场和远视场之间的距离是传感器可以清晰成像的范围。这个概念类似于2D视觉中的景深,即能够被Z轴清晰成像的范围。
3.工作距离(安装距离)
测量被测物表面与传感器下表面之间的距离。在这里,我们所指的传感器就是相机,每台相机的工作距离都有所不同,因此一定要记住工作距离。如果在选择好相机后,发现客户现场的安装高度无法达到相机的工作距离要求,那么你之前的准备工作就会全部白费。
4.分辨率(X方向分辨率)
传感器可以识别的最小尺寸。跟图像传感器一般是CMOS芯片的晶圆尺寸也就是感光芯片有关系。
5.线性度
该概念有时也被称为准确度或直线度。一般来说,它指的是Z轴方向的线性度,即参考值与测量值之间的差异与测量范围的比例。
6.重复精度(Z方向重复精度)
重复性也称为重复测量。它是指对被测物进行4100次重复扫描后,得到的最大偏差值。
比较2D的优势和特点
1.可以测量高度信息。
2.可以进行垂直方向上的校正。
3.便利的安装和架设。
4.宽广的景深,广阔的视野。
5.测量结果受物体表面颜色的影响较小。
6.可以通过高度来确定的特征有可计算段差、缝隙、平面度等。
7.可以对整个产品的空间有一定的认知,并且可以根据数模进行全面检查。
8.体积小巧,原理简明易懂,架设也很简单。
硬件主要介绍到这里,下章介绍软件调试........

![[GXYCTF2019]BabyUpload - 文件上传+绕过(后缀文件类型文件内容.htaccess)](https://img-blog.csdnimg.cn/27c8366ca4ad4afaba9c8b90b2e7a619.png#pic_center)