lcd简介
- LCD简介
- 1、分辨率
- 2、像素格式
- 3、LCD时间参数
- 4、RGB LCD屏幕时序
- 6、像素时钟
- 此文章摘抄于正点原子的嵌入式linux驱动开发指南,仅作为笔记,以放便忘记时查阅
LCD简介
LCD全称是Liquid Crystal Display,也就是液晶显示器,其显示的基本原理如下:
LCD的构造是在两片平行的玻璃基板当中放置液晶盒,下基板玻璃上设置TFT(薄膜晶体管),上基板玻璃上设置彩色滤光片,通过TFT上的信号与电压改变来控制液晶分子的转动方向,从而达到控制每个像素点偏振光出射与否而达到显示目的。
1、分辨率
对于LCD显示器,我们经常听到720P、1080P、2K或4K这样的字眼,这个就是LCD显示器分辨率。LCD显示器都是由一个个像素点组成,像素点就类似一个灯(在OLED显示器中,像素点就是一个小灯),这个小灯是RGB灯,也就是由R(红色)、G(绿色)和B(蓝色)这三种颜色组成的,而RGB就是光的三原色。1080P的意思就是一个LCD屏幕上的像素数量是19201080个,也就是这个屏幕一列1080个像素点,一共1920列,如下图所示:
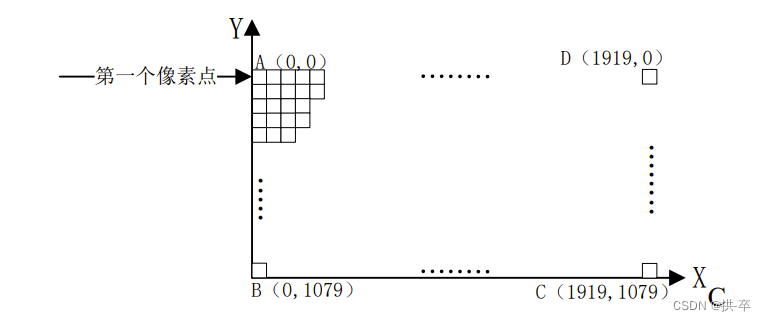
图1
上图就是1080P显示器的像素示意图,X轴就是LCD显示器的横轴,Y轴就是显示器的竖轴。图中的小方块就是像素点,一共有19201080=2073600个像素点。左上角的A点是第一个像素点,右下角的C点就是最后一个像素点。2K就是25601440个像素点,4K是38402160个像素点。很明显,在LCD尺寸不变的情况下,分辨率越高越清晰。同样的,分辨率不变的情况下,LCD尺寸越小越清晰。
2、像素格式
一个像素点就相当于一个RGB小灯,通过控制R、G、B这三种颜色的亮度就可以显示出各种各样的色彩。那该如何控制R、G、B这三种颜色的显示亮度呢?一般一个R、G、B这三部分分别使用8bit的数据,那么一个像素点就是8bit*3=24bit,也就是说一个像素点3个字节,这种像素格式称为RGB888。如果再加入8bit的Alpha(透明度)通道的话一个像素点就是32bit,也就是4个字节,这种像素格式称为ARGB888。
透明度的理解应该是如下两个图:
透明:
图2
不透明:
图3
对于ARGB8888这种像素格式,一个像素占用4个字节的内存,这四个字节每个位的分配如下图所示:
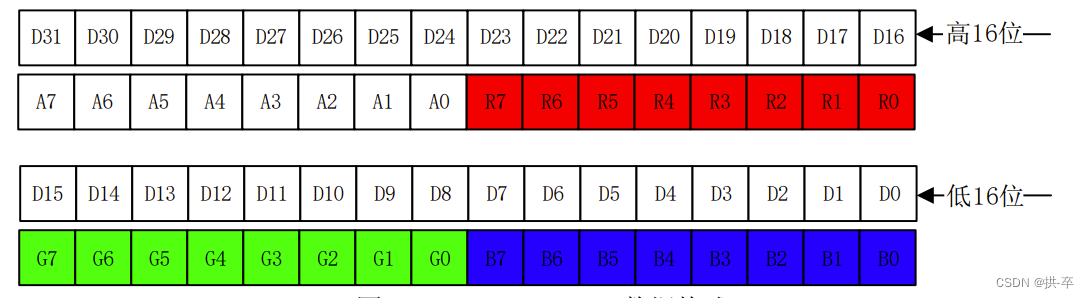
图4
在该图中,一个像素点是4个字节,其中bit31 ~ bit24是Alpha通道,bit23~bit16是RED通道,bit15 ~ bit8是GREEN通道,bit7 ~ bit 0是BLUE通道。所以红色对应的值就是0x00FF0000,绿色对应的值就是0x0000FF00,蓝色对应的值就是0x000000FF。通过调节R、G、B的比例可以产生其他的颜色,,比如0X00FFFF00就是黄色,0X00000000就是黑色,0X00FFFFFF就是白色。
3、LCD时间参数
如果将LCD显示一帧图像的过程想象成绘画,那么在显示的过程中就是用一根“笔”在不同的像素点画上不同的颜色。这根笔按照从左至右,从上到下的顺序扫描每个像素点,并且在像素点上画上对应的颜色,当画到最后一个像素点的时候一幅图像就绘制好了。假如一个LCD的分辨率为1024*600,那么其扫描如下图所示:
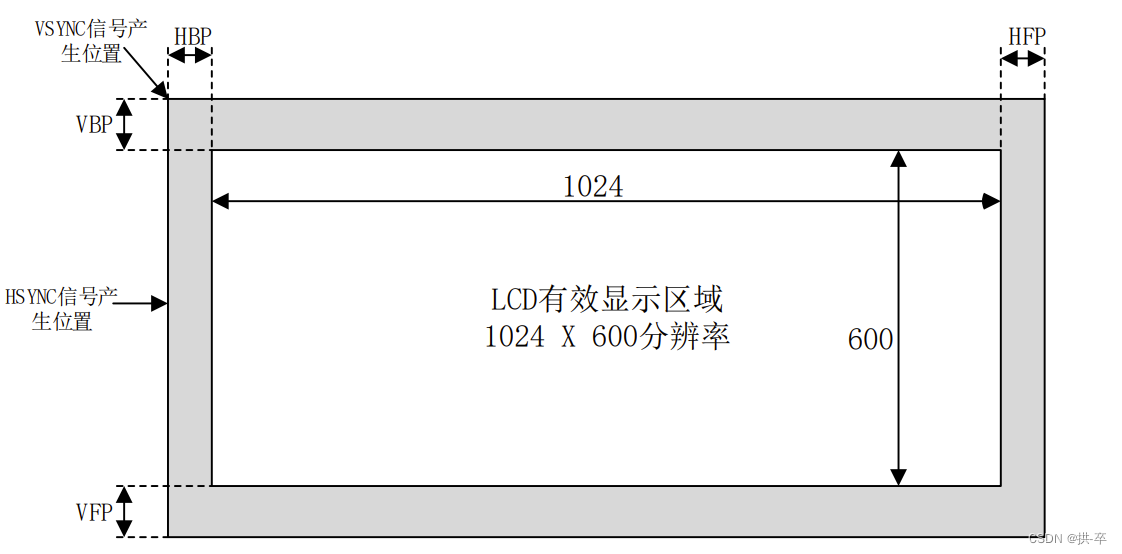
图5
结合图5来看LCD是怎么扫描显示一帧图像的。一帧图像也是由一行一行组成的。HSYNC是水平同步信号,也叫做行同步信号,当产生此信号的话就表示开始显示新的一行了,所以此信号都是在图5的最左边。VSYNC信号是垂直同步信号,也叫做帧同步信号,当产生此信号的话就表示开始显示新的一帧图像,所以此信号在图5的左上角。
在图5可以看到有一圈“黑边”,真正有效的显示区域是中间的白色部分。那这一圈“黑边”是什么东西呢?这就要从显示器的“祖先”CRT显示器开始说起了,CRT显示器就是以前很常见的那种大屁股显示器,在2019年应该很少见了,如果在农村应该还是可以见到的。CRT显示器屁股后面是一个电子枪,这个电子枪就是我们上面说的“画笔”,电子枪打出的电子撞击到屏幕上的荧光物质使其发光。只要控制电子枪从左到右扫完一行(也就是扫描一行),然后从上到下扫描完所有行,这样一帧图像就显示出来了。也就是说,显示一帧图像电子枪是按照“Z”型在运动,当扫描速度很快的时候看起来就是一幅完整的画面了。
当显示完一行以后会发出HSYNC信号,此时电子枪就会关闭,然后迅速的移动到屏幕的左边,当HSYNC信号结束以后就可以显示新的一行数据了,电子枪就会重新打开。在HSYNC信号结束到电子枪重新打开之间会插入一段延时,这段延时就是图5种的HBP。当显示完一行以后就会关闭电子枪等待HSYNC信号产生,关闭电子枪到HSYNC信号产生之间会插入一段延时,这段延时就是图5中的HFP信号。同理,当显示完一帧图像以后电子枪也会关闭,然后等到VSYNC信号产生,期间也会加入一段延时,这段延时就是图5中的VFP。VSYNC信号产生,电子枪移动到左上角,当VSYNC信号结束以后电子枪重新打开,中间也会加入一段延时,这段延时就是图5中的VBP。
HBP、HFP、VBP和VFP就是导致图5中黑边的原因,但是这是CRT显示器存在黑边的原因,现在是LCD显示器,不需要电子枪了,那么为何还会有黑边呢?这是因为RGBLCD屏幕内部是有一个IC的,发送一行或者一帧数据给IC,IC是需要反应时间的。通过这段反应时间可以让IC识别到一行数据扫描完成了,要换行了,或者一帧图像扫描完了,要开始下一帧图像显示了。因此,在LCD屏幕中继续存在HBP、HFP、VPB和VFP这四个参数的主要目的是为了锁定有效的像素数据。这四个时间是LCD重要的时间参数。后面编写LCD驱动的时候是要用到的,至于这四个时间参数具体值是多少,那需要去查看所使用的LCD数据手册了。
4、RGB LCD屏幕时序
上面讲了行显示和帧显示,我们来看一下行显示对应的时序图,如下图所示:
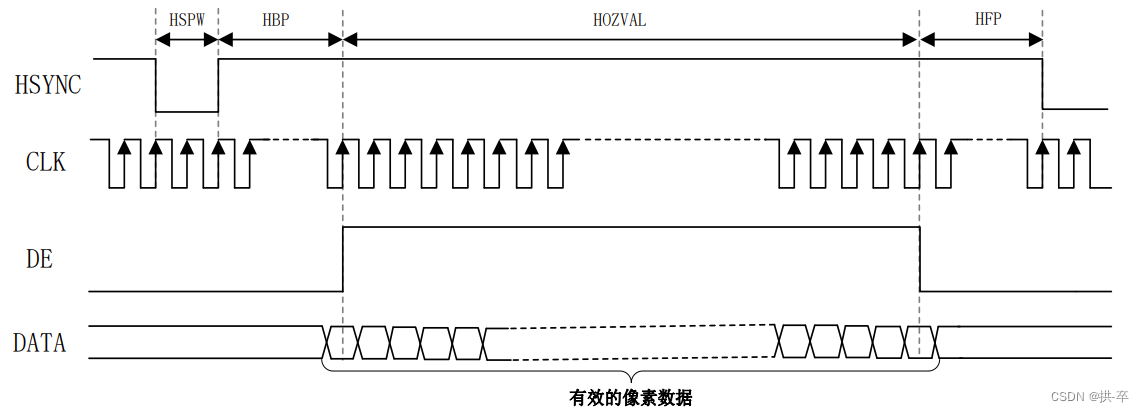
图6 行显示时序
HSYNC:行同步信号,当此信号有效的话就表示开始显示新的一行数据,查阅所使用的LCD数据手册可以知道此信号是低电平有效还是高电平有效,假设此时是低电平有效。
HSPW:有些地方也叫做thp,是HSYNC信号宽度,也就是HSYNC信号持续时间。HSYNC信号不是一个脉冲,而是需要持续一段时间才是有效的,单位为CLK。
HBP:有些地方叫做thb,前面已经讲过了,术语叫做行同步信号后肩,单位是CLK。
HOZVAL:有些地方叫做thd,显示一行数据所需的时间,假如屏幕的分辨率为1024*600,那么HOZVAL就是1024,单位为CLK。
HFP:有些地方叫做thf,前面已经讲过了,术语叫做行同步信号前肩,单位是CLK。
当HSYNC信号发出以后,需要等待HSPW+HBP个CLK时间才会接受到真正有效的像素数据。当显示完一行数据以后需要等待HFP个CLK时间才能发出下一个HSYNC信号,所以显示一行所需要的时间就是:HSPW+HBP+HOZVAL+HFP。
一帧图像就是由很多个行组成的,RGB LCD 的帧显示时序如下图所示:
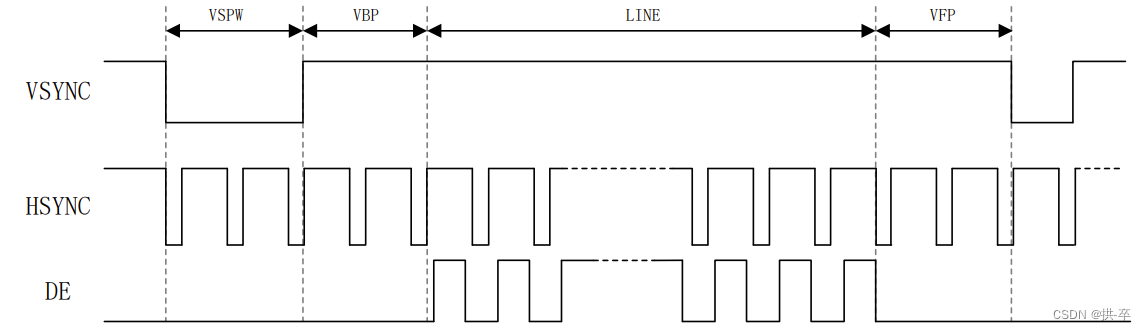
图7 帧显示时序图
VSYNC:帧同步信号,当此信号有效的话,就表示开始显示新的一帧数据,查阅所使用的LCD数据手册可以知道此信号是低电平有效还是高电平有效,假设此时是低电平有效。
VSPW:有些地方也叫做tvp,是VSYNC信号宽度,也就是VSYNC信号持续时间,单位为1行的时间。
VBP:有些地方叫做tvb,显示一帧有效数据所需的时间,假如屏幕分辨率为1024*600,那么LINE就是600行的时间。
VFP:有些地方叫做tvf,前面已经讲过了,术语叫做帧同步信号前肩,单位为1行的时间。
显示一帧所需要的时间就是:VSPW+VBP+LINE+VFP个行时间,最终的计算公式为:
T=(VSPW+VBP+LINE+VFP) * (HSPW+HBP+HOZVAL+HFP)
因此我们在配置一款RGB LCD 的时候需要知道几个参数:HOZVAL(屏幕有效宽度)、LINE(屏幕有效高度)、HBP、HSPW、HFB、VSPW、VBP和VFP
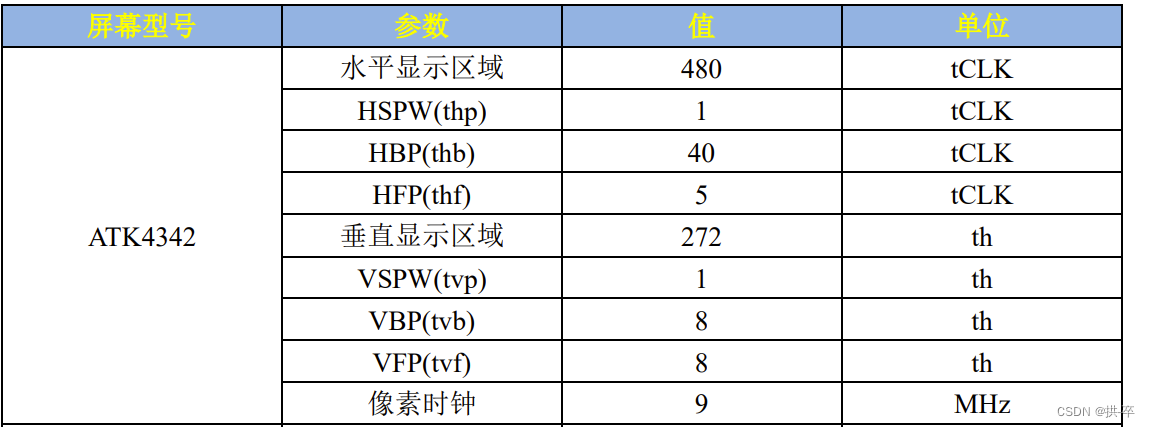
对于ATK4342:
6、像素时钟
像素时钟就是RGB LCD的时钟信号,以ATK4342这款屏幕为例,显示一帧图像所需要的时钟数就是:
(VSPW+VBP+LINE+VFP) * (HSPW+HBP+HOZVAL+HFP)
=(1+8+272+8)(1+40+480+5)
=289526
=152014
显示一帧图像需要152014个时钟数,那么显示60帧就是152014*60=9120840≈9Mhz